;===============================================================================================
; VARIATEUR pour moteur BRUSHLESS a 3 fils : variat3_21.ASM
; pour PIC16F628 et Qx=20,000 Mhz
; par Silicium 628
;derniere mise a jour: 29/09/2005
;===============================================================================================
;REMERCIEMENTS
;Suite a la publication de ce soft sur mon site, certains internautes specialistes dans tel ou tel domaine
;m'ont contacte afin de m'aider a en ameliorer l'ecriture.
;Je tiens ainsi a remercier tout particulierement I.M.B. qui m'a donne (en anglais);beaucoup d'astuces
;afin de rendre mon code plus structure et plus lisible.
;===============================================================================================
;DIRECTIVEES D'ASSEMBLAGE:
stops=1
stop_BEC=1
frein_permis=1
vif=1
detecte_perio_z=0
detecte_vts_lente=0
integration_PPM=1
;NOTE: ces directives activent ou inhibent certaines fontions
;LISTE DES PRINCIPALES PROCEDURES: (Double-clic sur 1 mot pour le selectionner puis ctrl+F3 dans MPLAB, pratique...)
;TESTS
;MACROS
;mot16A macro ;charge AH et AL avec le mot code sur 16 bits transmis
;mot16B macro ;charge BH et BL avec le mot code sur 16 bits transmis
;Changements de banques
;R_EEPROM
;W_EEPROM
;CONSTANTES
;VARIABLES_EN_BANQUE0
;TRAITEMENT DES INTERRUPTIONS (Aiguillage vers routines)
;INITIALISATION DES PORTS
;PROGRAMMATION DU REGISTRE OPTION (BANK1)
;PROG DU REGISTRE INTCON (BANK0)
;PROG DU REGISTRE T1CON (BANK0)
;PROG DU REGISTRE T2CON (BANK0)
;PROG DU REGISTRE PR2 (BANK1)
;PROG DU REGISTRE PIE1 (BANK1)
;PROG DU REGISTRE CCP1CON (BANK0)
;Initialisation_des_variables
;BOUCLE_PRINCIPALE
;inttimer0 ;-> PERIODEMETRE sur le signal PPM du recepteur de radiocommande (detecte arret radio)
;inttimer1 ;-> genere les signaux de commande moteur
;inttimer2 ;-> decoupe le signal de sortie a (relativement, 10kHz) haute frequence au demarrage
;intB0 ;-> detecte les fronts du signal PPM du recepteur de radio-commande et MESURE le signal T_PPM
;intB4_7 ;-> detection signaux BEMF
;pasMot1
;BLOQUE
;sortie
;demarre
;ROUTINES MATH
;convhbin ;conversion sexadecimale -> binaire ;entree: AA, BB ;resultat: AH,AL = 60*AA+BB
;multi16 ;mutiplication 8 bits x 8 bits de w par AA (donnees sur 1 octet) ;resultat (sur 2 octets) dans AH,AL
;multi24 ;mutiplication 8 bits x 16 bits de w par AH,L (donnees sur 1 octet) ;resultat (sur 3 octets) dans A2,1,0
;divi2 ;division d'une valeur codee sur 16 bits (AH,AL) par 2
;Div24_8 ;division 24bits par 8 bits, resultat sur 24 bits
;add16A ;addition 16bits resultat dans A ;(AH,AL)+(BH,BL) -> (AH,AL)
;add16B ;addition 16bits resultat dans B ;(AH,AL)+(BH,BL) -> (BH,BL)
;cpl16x ;complement a deux de la variable codee sur 2 octets situes aux adresses w et w+1 permet les soustractions
;compar16p;comparaison de deux valeurs codees sur 16 bits (AH,AL a BH,BL) ;resultat dans STATUS carry et zero
;movxA ;mov la variable codee sur 2 octets situes aux adresses w et w+1 dans -> AH,AL
;movAx ;mov AH,AL dans -> la variable codee sur 2 octets situes aux adresses w et w+1
;movxB ;mov la variable codee sur 2 octets situes aux adresses w et w+1 dans -> BH,BL
;movBx ;mov BH,BL dans -> la variable codee sur 2 octets situes aux adresses w et w+1
;cvBDU ;CONVERSION BINAIRE(1) (1 octet incomplet 0..99 et pas 0..255) --> BCD ;nombre a convertir dans AA
;cvBCU ;CONVERSION BINAIRE(2) (1 octet complet 0..255) --> BCD ;resultat dans BB (centaines) et dans AA (unites)
;Delay_ms (voir code externe dans le fichier Delay.asm)
;pasMot1
;vari_vit
;demarre
;TABLEAUX
;
;
;------------------------------------------------------------------------------------------------
;remarque: suite aux modifications (=ameliorations!) certains commentaires peuvent se reveler faux !!!
;j'en suis desole. Je relis regulierement les commentaires et essaye de les tenir a jour.
;toutefois il m'arrive de trouver des enormites ! que je corrige...
;------------------------------------------------------------------------------------------------
;===================================== PRINCIPE ==================================================
;REMARQUE PRELIMINAIRE:
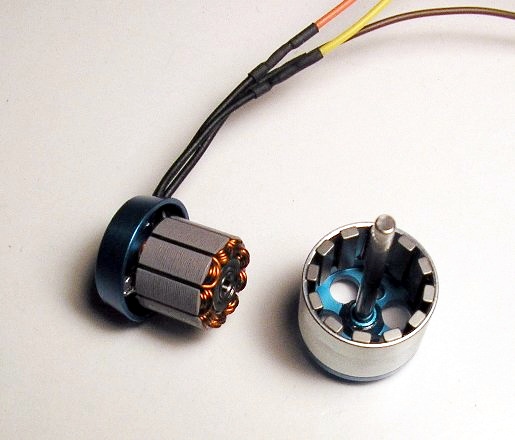
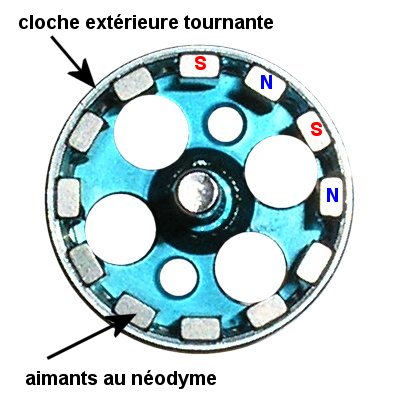
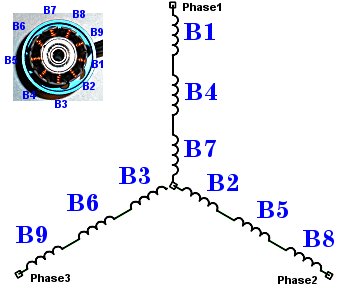
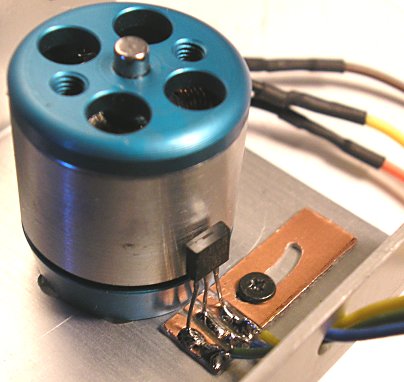
;De par la constitution du moteur brusless utilise: (9 poles electro-magnetiques cables en 3 groupes de 3 et 12 aimants):
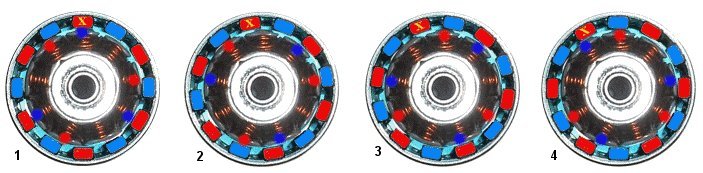
;Quand le champ tourne de 360degre durant le cycle electrique complet, le rotor ne tourne que de 360/6=60 degres.
;Il faut que le champ magnetique fasse 6 tours pour que le rotor en fasse un -> couple important
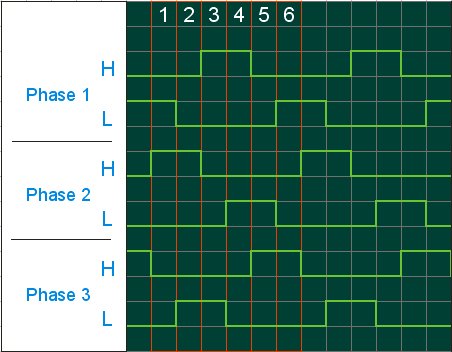
;un tour (360degre ) de champ magnetique se decompose electroniquement en 6 phases.
;un tour moteur est effectue apres 6x6 = 36 phases electriques.
;chacune de ces phases electriques correspond a un pas dans le tableau Tab_ph
;le tableau Tab_ph comprend 6 lignes correspondant aux six types de phases,
;dont la totalite se deroule pendant 1/6 de tour moteur soit 60degre
;une ligne du tableau concerne donc un angle de 10degre du moteur.
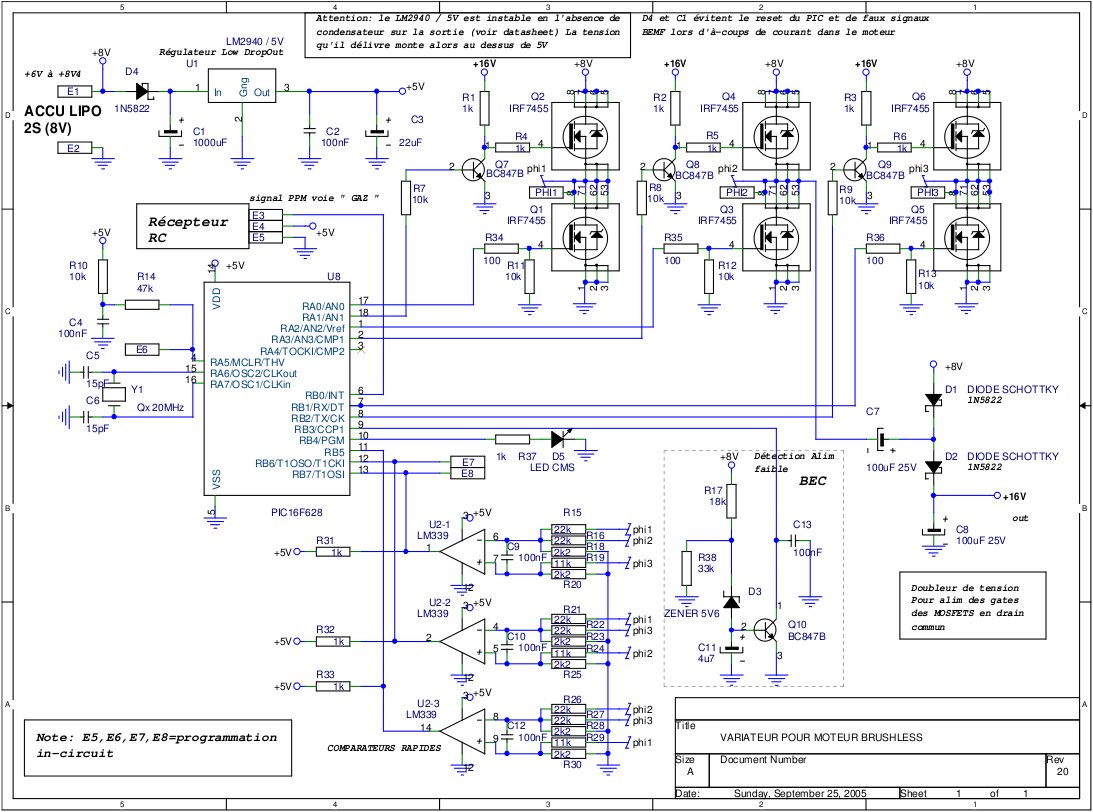
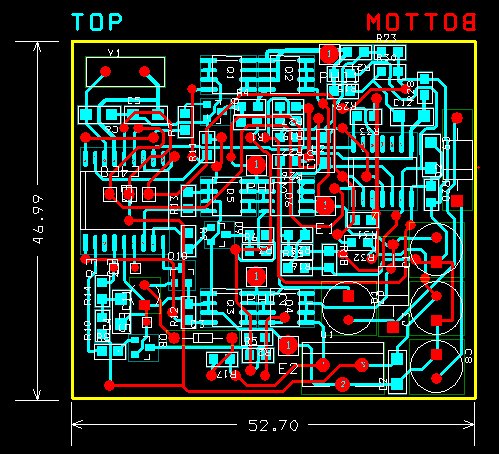
;le PIC commande 6 MOSFETS (2 par phase) montes en pont en H
;par 4 bits du PORTA (bit 0 a 3) et 2 bits du portB
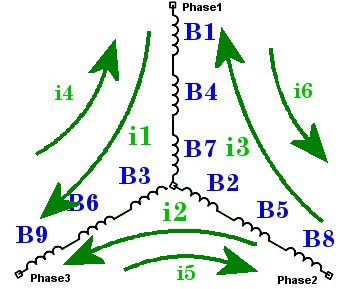
;Il s'agit de construire un champs tournant avec un courant triphase
;voir tableau Tab_ph
;Par l'interruption intPortB, les signaux issus d'un traitement analogique des tensions BEMF font avancer
;le cycle de commande des MOSFFETS d'un pas a chaque impulsion recue sur un des 3 pins (RB5, RB6 ou RB7)
;la variation de vitesse se fait par variation du rapport cyclique de decoupage des signaux de sortie
;===================================== SECURITE ==================================================
;arret si plus de signal de reception
;arret si manche gaz + trim =0
;ne demarre pas a la mise sous tension, meme avec le manche des gaz a fond (a condition que la duree
;de coupure de l'alim soit suffisante pour que le PIC ait eu le temps de reseter, donc attention!)
;le seul demarrage possible se produit en montant le manche des gaz DEPUIS ZERO
;attention si l'emetteur de radiocommande est a l'arret, il faut s'attendre a des receptions de parasites
;provoquant des demarrages rates.
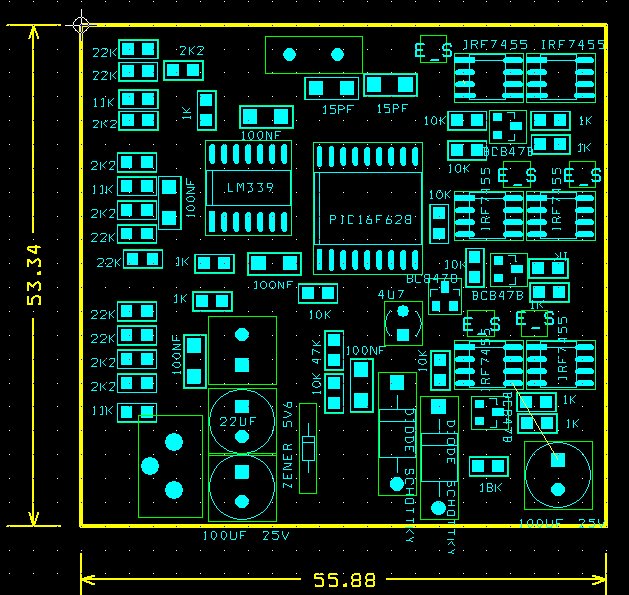
;fonction BEC implantee depuis la version 19 - met le moteur au ralentit si tension accu faible. sert a deux choses
;- ne pas decharger les accus LiPo sous le minimum autorise (3V par element, reglage par diode zener et resistances
; sur le circuit)
;- toujours garder sufisamment de tension pour alimenter le recepteur de radiocommande
;ATTENTION: le BEC est ici ajuste pour 2 elements LiPo en serie, pas pour 3.
;le circuit constitue autour du transistor Q10 est perfectible
;la partie du soft qui gere le BEC, et qui stope completement (ou pas) le moteur et egalement revisable
;(chercher BEC dans le listing)
;============================== REMARQUES GENERALES ==============================================
;RAZ signifie Remise a Zero
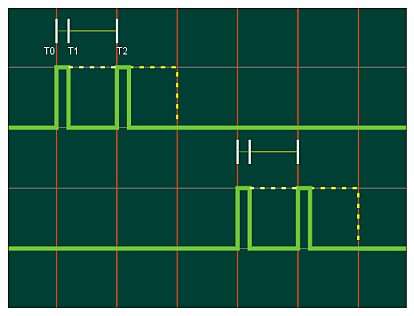
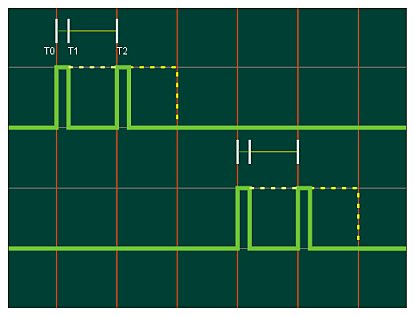
;PPM : type de modulation utilisee en radiocommande analogique par largeur d'impulsion (Phase Pulse Modulation)
;un train de 'n' impulsions, 'n'=nombre de voies module la HF, 1 impulsion par voie
;les impulsions durent entre 1,1ms et 2,2ms suivant la position du manche de la telecommande
;periode de 'relaxation' entre deux trains = 20ms environ
;la separation des impultions destinees a chaque voies se fait dans le recepteur radio
;la notation ':=' dans les commentaires (affectation) me vient de la programmation en Pascal.
;une lecture attentive de ce code fait apparaitre de curieuses sequences goto etiquette suivis immediatement
;par la destination. C'est voulu, par souci de lisibilite et de structuration du code
;ca evite surtout, lors d'ajout de bouts de code, D'OUBLIER d'ajouter le-dit goto
;D'autre part, j'aime bien que mes routines aient une porte de sortie unique
;plutot que de ballancer des 'return' un peu partout.
;representation d'un nombre hexadecimal: commence par "0x" ex: 0x20
; B'00010000' represente une valeur binaire
;la notation periodeH,L (par exemple) designe ici le mot 16bits forme par les 2 octets periodeH et periodeL
;et represente donc une valeur numerique codee sur 16 bits
;Utiliser une version recente de MPLAB afin que le PIC16F628 soit pris en compte (ma version= 7.10.00 )
;voir sur le site de Microchip(R): http://www.microchip.com
;===============================================================================================================
list p=16f628A,r=dec ; list directive to define processor ; constantes systeme decimal
#include <p16f628a.inc> ; processor specific variable definitions
#include "Delay.inc"
__CONFIG _CP_OFF & _WDT_OFF & _BODEN_ON & _PWRTE_ON & _HS_OSC & _MCLRE_ON & _LVP_OFF
; '__CONFIG' precise les parametres encodes dans le processeur au moment de
; la programmation du processeur. Les definitions sont dans le fichier include.
; Voici les valeurs et leurs definitions :
; _CP_ON Code protection ON : impossible de relire
; _CP_OFF Code protection OFF
; _PWRTE_ON Timer reset sur power on en service
; _PWRTE_OFF Timer reset hors-service
; _WDT_ON Watch-dog en service
; _WDT_OFF Watch-dog hors service
; _LP_OSC Oscillateur quartz basse vitesse (32<F<200Khz)
; _XT_OSC Oscillateur quartz moyenne vitesse (200Khz<F<4Mhz)
; _HS_OSC Oscillateur quartz grande vitesse (4Mhz<F<20Mhz)
; _RC_OSC Oscillateur a reseau RC
; Reset du PIC si tension <4V
; ------------------------------
; _BODEN_ON Reset tension en service Valide PWRTE_ON automatiquement
; _BODEN_OFF Reset tension hors service
; Programmation sur circuit
; ------------------------------
; _LVP_ON RB4 permet la programmation serie du PIC
; _LVP_OFF RB4 en utilisation normale
; "departRam equ 0x20"
;===============================================================================================================
; MACROS
;===============================================================================================================
SWAPwf MACRO reg
xorwf reg,f
xorwf reg,w
xorwf reg,f
ENDM
mot16A macro mot16 ;charge AH et AL avec le mot code sur 16 bits transmis
movlw low mot16
movwf AL
movlw high mot16
movwf AH
endm
mot16B macro mot16 ;charge BH et BL avec le mot code sur 16 bits transmis
movlw low mot16
movwf BL
movlw high mot16
movwf BH
endm
LoadInt24 macro Destination,mot24b
banksel Destination
movlw low mot24b ;bits 0..7 (8 bits)
movwf Destination+0
movlw high mot24b ;bits 8..15 (8 bits)
movwf Destination+1
movlw upper mot24b ;bits 16..21 (6 bits)
movwf Destination+2
endm
; lire eeprom (adresse et resultat en w)
R_EEPROM macro
clrwdt
banksel EEADR ;(bank1)
movwf EEADR ; Adresse to read
bsf EECON1,RD ; ordre de lecture
movf EEDATA,w ; W = EEDATA
bcf STATUS,RP0 ; Bank 0
endm
;ecriture en EEPROM (adresse dans DDD (commun 4 banques), data dans w)
W_EEPROM macro
clrwdt
LOCAL loop
movwf EEDATA ; Data to write
; movlw adress1 ; adresse passee en parametre a la macro (moins souple que par registre)
movf DDD,w ; adresse passee par registre DDD, commun aux 4 banques
movwf EEADR
bsf EECON1, WREN ; Enable Write
bcf INTCON, GIE ; Disable INTs
movlw 0x55
movwf EECON2 ; Write 55
movlw 0xAA
movwf EECON2 ; Write AA
bsf EECON1, WR ; lancer cycle d'ecriture
bsf INTCON, GIE ; reautoriser INTs
loop clrwdt
btfsc EECON1 , WR ; tester si ecriture terminee
goto loop ; non, attendre
bcf EECON1 , WREN ; verrouiller prochaine ecriture
bcf STATUS , RP0 ; passer en banque0
endm
;===============================================================================================================
;VARIABLES_EN_BANQUE0
;le PIC16F628 possede 224 octets de RAM repartis en 3 emplacements (80+16, +80, +48 octets)
;ici premiere banque de 96 octets, debut a l'adresse 0x20
;verifier sur le listing absolu que la derniere adresse soit < 7Fh
GPR0 udata ;
AA res 1 ;registre de travail
BB res 1 ;registre de travail
CC res 1 ;registre de travail
DD res 1 ;registre de travail
;registres pour travailler avec des mots de 16 bits
AH res 1 ;registre de travail poids fort
AL res 1 ;registre de travail poids faible
BH res 1 ;registre de travail poids fort
BL res 1 ;registre de travail poids faible
CH res 1 ;registre de travail poids fort
CL res 1 ;registre de travail poids faible
;registres pour travailler avec des mots de 24 bits
A2 res 1 ;registre de travail poids fort
A1 res 1 ;registre de travail poids intemediaire
A0 res 1 ;registre de travail poids faible
B2 res 1 ;registre de travail poids fort
B1 res 1 ;registre de travail poids intemediaire
B0 res 1 ;registre de travail poids faible
count0 res 1 ;utilise dans la l'int Timer0
count1 res 1 ;utilise dans la multiplication 8bits x 8bits
n_ph res 1 ;numero de la periode en cours (1 cycle = 6 periodes)
signal res 1 ;signal de sortie brut
T_PPM res 1 ;temps (duree) du signal PPM (voie des gaz en sortie du recepteur de radiocommande)
memo1 res 1 ;memo dans la boucle principale
periodeH res 1 ;pour mesurer la periode (vitesse de rotation) et decouper le signal en fonction
periodeL res 1
rapcycl res 1 ;pour le decoupage HF des signaux de sortie pendant le demarrage
Dividende res 3 ;pour la routine Div24_8
Diviseur res 1 ;pour la routine Div24_8
Aux res 2 ;pour la routine Div24_8
Compteur1 res 1 ;pour la routine Div24_8
#define Quotient Dividende
mesflag1 res 1 ;8 flags perso divers
;b0: stop moteur par ordre emis par la radio-commande (trim + amnche gaz en bas...) ou pas de signal du tout
;b1; stop si accrochage HF de l'electronique
;b2: vitesse lente ou arret du moteur detecte
;b3: decoupage HF des signaux pendant le demarrage
;b4: phase du decoupage HF
;b5: quel front du signal PPM vient-on de detecter ? ( voir l'intB0 )
;b6: stop moteur permanent si tension faible ("BEC")
;b7: empeche le decoupage: moteur force a vitesse max lorsque manche + trim de la radio au max
#define STOP_RADIO mesflag1,0
#define STOP_ACCRO mesflag1,1
#define VTS_LENTE mesflag1,2
#define DECOUP_HF mesflag1,3
#define PHASE_HF mesflag1,4
#define EDGE_PPM mesflag1,5
#define U_FAIBLE mesflag1,6
#define A_FOND mesflag1,7
mesflag2 res 1 ;8 flags perso divers
;b0: decoupage enable (1 seul par pas moteur)
;b1: FREIN MOTEUR Enable
#define DECOU_En mesflag2,0
#define FREIN_En mesflag2,1
;===============================================================================================================
; VARIABLES ZONE COMMUNE
; Zone de 16 bytes
; CBLOCK 0x70 ;Debut de la zone (0x70 a 0x7F)
udata_shr
WW res 1 ;pour sauvegarder w pendant INT
STUS_TMP res 1 ;pour sauvegarder STATUS pendant INT
FSR_temp res 1 ;sauvegarde FSR (si indirect en interrupt)
PLATH_tmp res 1
DDD res 1 ;registre d'adresses commun
;===============================================================================================================
STARTUP code
;===============================================================================================================
goto start
;===============================================================================================================
; TRAITEMENT DES INTERRUPTIONS (Aiguillage vers routines)
;===============================================================================================================
;RAPPEL Un seul vecteur d'interruption, d'adresse 004 est diponible
;Quelle que soit la cause de l'interruption, le PC est charge par 004
;Il faut ensuite tester les differents indicateurs pour savoir quel est la source de l'INT.
;voir le registre INTCON
; ORG ISR_V ; Vecteur d'Interruption
PROG code
ISR movwf WW
swapf STATUS,w
movwf STUS_TMP
movf FSR , w
movwf FSR_temp
movf PCLATH , w ;charger PCLATH
movwf PLATH_tmp ;le sauver
clrf PCLATH ;on est en page 0
banksel INTCON ;passer en banque0
intTMR0 btfsc INTCON,5 ;TOIE teste si c'est bien le timer0 qui a declenche l'INT
btfss INTCON,2 ;TOIF test FLAG timer0
goto intRB47 ;non suite
call inttimer0 ;oui, traiter interrupt timer0
bcf INTCON,2 ;effacer flag interupt timer: reautorise l'INT Timer0
goto restorREG
intRB47 btfsc INTCON,3 ;RBIE teste si c'est bien RB47 qui a declenche l'INT
btfss INTCON,0 ;RBIF test FLAG INT exterieure bits 4 a 7 du port B
goto intRB0 ;non suite
call intB4_7 ;oui, traiter interrupt PORTB,4_7
bcf INTCON,0 ;effacer flag interupt portB: reautorise interruption PORTB,4_7
goto restorREG
intRB0 btfsc INTCON,4 ;INTE teste si c'est bien RB0 qui a declenche l'INT
btfss INTCON,1 ;INTF test FLAG INT exterieure bit 0 du port B
goto intTMR2 ;non suite
call intB0 ;oui, traiter interrupt PORTB,0
bcf INTCON,1 ;effacer flag interupt portB: reautorise interruption PORTB,0
goto restorREG
intTMR2
banksel PIE1 ;BANK1
btfss PIE1,TMR2IE ;TMR2IE teste si c'est bien le timer 2 qui a declenche l'INT
goto intTMR1
banksel PIR1 ;BANK0
btfss PIR1,TMR2IF ;TMR2IF test FLAG timer2
goto intTMR1 ;non suite...
call inttimer2 ;oui, traiter interrupt timer2
bcf PIR1,TMR2IF ;reautorise l'INT par Timer2
goto restorREG
intTMR1
banksel PIR1 ;BANK0
btfss PIR1,TMR1IF ;test FLAG timer1
goto intCCP1 ;non test suivant
call inttimer1 ;oui, traiter interrupt timer1
bcf PIR1,TMR1IF ;reautorise l'INT par Timer1
goto restorREG
intCCP1 btfss PIR1,CCP1IF ;test FLAG module de COMPARAISON TMR1H,L = CCPR1H,L ?
goto restorREG ;non suite...
call intCompar ;oui, traiter interrupt COMPARAISON
bcf PIR1,CCP1IF ;reautorise l'INT COMPARAISON
goto restorREG
;intUSRTi btfss PIR1,RCIF ;test FLAG USART en reception
; goto intUSRTo ;non test suivant
; call int232in ;oui, traiter interrupt USART IN
; goto restorREG
;
;intUSRTo btfss PIR1,TXIF ;test FLAG USART en emission
; goto restorREG ;non suite
; call int232out ;oui, traiter interrupt USART OUT
; goto restorREG
restorREG movf PLATH_tmp, w ;recharger ancien PCLATH
movwf PCLATH
movf FSR_temp,w
movwf FSR
swapf STUS_TMP,w ;swap STATUS_TMP, resultat dans w
movwf STATUS ;restaurer status
swapf WW,f ;Inversion L et H de l'ancien W sans modifier Z
swapf WW,w ;Re-inversion de L et H dans W
retfie ;remet GIE a 1 puis return
;===============================================================================================================
; TABLEAUX DE DONNEES
;===============================================================================================================
Tab_Ph movlw high Tableau
movwf PCLATH
movlw low Tableau
addwf n_ph,w
btfsc STATUS,C
incf PCLATH,f
movwf PCL
;tableau des valeurs des bits de commande des phases
Tableau retlw B'00000110' ;phase 0
retlw B'00100100' ;phase 1
retlw B'00100001' ;phase 2
retlw B'00001001' ;phase 3
retlw B'00011000' ;phase 4
retlw B'00010010' ;phase 5
retlw B'00000000'
retlw B'00000000'
;===============================================================================================================
; START START START START START START START START START START START
;===============================================================================================================
start nop
bcf STATUS,IRP ;pour l'adressage indirect
;IRP: Register Bank Select bit (used for indirect addressing)
;=0 -> Bank 0, 1 (00h - FFh)
;=1 -> Bank 2, 3 (100h - 1FFh)
banksel AA ;BANK0
;===============================================================================================================
;ZONE de TESTS de procedures (simulation soft)
;===============================================================================================================
; INITIALISATION DES PORTS
;===============================================================================================================
bcf RCSTA,7 ;(bit SPEN) portB[1,2] en ports E/S ( pas en USART )
banksel CMCON ;BANK0
movlw 0x07
movwf CMCON ;PORT A en E/S numeriques (BANK0)
call BLOQUE ;positionne les bits du port A avant meme de les configurer en sortie
banksel TRISA
movlw B'00000000' ;0=sortie 1=entree ATTENTION RA4 =drain ouvert
movwf TRISA ;config du port A (TRISA en page 1)
movlw B'11101001'
movwf TRISB ;config du port B
banksel AA
; bsf PORTB,4 ;POUR TEST: signal de RESET visible sur le PORTB,4
;===============================================================================================================
;PROGRAMMATION DU REGISTRE OPTION (BANK1) - voir datasheet p:20 du datasheet PIC16F62X.pdf
;bit 7: RBPU =0 -> R tirage a Vdd du port B
;bit 6: INTEDG=1 -> INT sur front montant ou descendant de RB0
; 1 = Interrupt on rising edge of RB0/INT pin
; 0 = Interrupt on falling edge of RB0/INT pin
;bit 5: T0CS = 0 -> TMR0 Clock Source Select bit
; 1 = Transition on RA4/T0CKI pin (Fonctionnement en mode compteur)
; 0 = Internal instruction cycle clock (CLKOUT) (Fonctionnement en mode timer)
;bit 4: RTE = 0 -> inc sur front montant
;bit 3: PSA = 0 -> prediv affecte au timer0
;bits 2,1,0 : PS2,1,0
;Bit Value TMR0 Rate WDT Rate
;000 1 : 2 1 : 1
;001 1 : 4 1 : 2
;010 1 : 8 1 : 4
;011 1 : 16 1 : 8
;100 1 : 32 1 : 16
;101 1 : 64 1 : 32 ***** ICI 100b -> Timer0 = 1/64 *****
;110 1 : 128 1 : 64
;111 1 : 256 1 : 128
banksel OPTION_REG
; ndegre bits: '76543210'
movlw B'01000101'
movwf OPTION_REG
;===============================================================================================================
;PROG DU REGISTRE INTCON (BANK0) - voir datasheet p:21
;bit 7 GIE =0 -> INT GLOBALE interdite. (voir + bas)
;bit 6 PEIE=1 -> INT PERIPHERIQUES autorisees. (timer1 en fait partie)
;bit 5 T0IE=1 -> INT par debordement Timer0 autorisees.
;bit 4 INTE=1 -> INT de RB0/INT autorisee (INTERRUPTIONS EXTERNES)
;bit 3 RBIE=1 -> INT du port RB4 a RB7 autorisee.
;bit 2 T0IF=x (flag mis a 1 par debordement du Timer0)
;bit 1 INTF=x (flag mis a 1 par une INT provoquee par la libne RB0/INT du port B)
;bit 0 RBIF=x (flag mis a 1 si changement d'etat des entrees RB4 a RB7 du port B. attention RB1 a RB3 -> pas d'INT)
banksel INTCON
; ndegre bits: '76543210'
movlw B'01111000'
movwf INTCON
;===============================================================================================================
;PROG DU REGISTRE T1CON (BANK0) (i zorepu lapele otremen !)
;bit 7-6: Unimplemented: Read as '0'
;bit 5-4: T1CKPS1:T1CKPS0: Timer1 Input Clock Prescale Select bits
;11 = 1/8 Prescale value
;10 = 1/4 Prescale value >> valeur choisie ici <<
;01 = 1/2 Prescale value
;00 = 1/1 Prescale value
;bit 3: T1OSCEN: Timer1 Oscillator Enable Control bit
;1 = Oscillator is enabled
;0 = Oscillator is shut off
;Note: The oscillator inverter and feedback resistor are turned off to eliminate power drain
;bit 2: T1SYNC: Timer1 External Clock Input Synchronization Control bit
;si -> TMR1CS = 1
;1 = Do not synchronize external clock input
;0 = Synchronize external clock input
;si -> TMR1CS = 0
;This bit is ignored. Timer1 uses the internal clock when TMR1CS = 0.
;bit 1: TMR1CS: Timer1 Clock Source Select bit
;1 = External clock from pin RB6/T1OSO/T1CKI (on the rising edge)
;0 = Internal clock (FOSC/4)
;bit 0: TMR1ON: Timer1 On bit
;1 = Enables Timer1
;0 = Stops Timer1
; **** RECAPITULONS:*****
;bit 7 : Inutilise : lu comme 0
;bit 6 : Inutilise : lu comme 0
;bit 5 : T1CKPS1 : Timer 1 oscillator ClocK Prescale Select bit 1
;bit 4 ; T1CKPS0 : Timer 1 oscillator ClocK Prescale Select bit 0
;bit 3 : T1OSCEN : Timer 1 OSCillator ENable control bit (oscillateur interne)
;bit 2 : T1SYNC : Timer 1 external clock input SYNChronisation control bit
;bit 1 : TMR1CS : TiMeR 1 Clock Source select bit
;bit 0 : TMR1ON : TiMeR 1 ON bit
banksel T1CON
; ndegre bits: '76543210' ;prescale Timer1=1/4
movlw B'00100001'
movwf T1CON
;===============================================================================================================
;PROG DU REGISTRE T2CON (BANK0)
;bit 7: Unimplemented: Read as '0'
;bit 6-3: TOUTPS3:TOUTPS0: Timer2 Output Postscale Select bits
;0000 = 1:1 Postscale
;0001 = 1:2 Postscale
;0010 = 1:3 Postscale
;0011 = 1:4 Postscale
;0100 = 1:5 Postscale etc... (valeur binaire +1)
;1111 = 1:16 Postscale
;bit 2: TMR2ON: Timer2 On bit =1 : Timer2 is on
;bit 1-0: T2CKPS1:T2CKPS0: Timer2 Clock Prescale Select bits
;00 = Prescaler = 1
;01 = Prescaler = 4
;1x = Prescaler = 16 (valeur choisie ici)
banksel T2CON
; ndegre bits: '76543210'
movlw B'00000110'
movwf T2CON
;===============================================================================================================
;PROG DU REGISTRE PR2 (BANK1)
;utilise par timer2
banksel PR2
movlw 16
movwf PR2
;===============================================================================================================
;PROG DU REGISTRE PIE1 (BANK1)
;bit 7 : PSPIE b7 : Toujours 0 sur PIC 16F876
;bit 6 : ADIE : masque int convertisseur A/D
;bit 5 : RCIE : masque int reception USART
;bit 4 : TXIE : masque int transmission USART
;bit 3 : SSPIE : masque int port serie synchrone
;bit 2 : CCP1IE: masque int CCP1 (module de comparaison TMR1H,L = CCPR1H,L ->INT)
;bit 1 : TMR2IE: masque int TMR2 = PR2
;bit 0 : TMR1IE: masque int debordement tmr1
banksel PIE1
; ndegre bits: '76543210'
movlw B'00000111' ;enable: INT TIMER1 ; INT TIMER2 ; COMPARAISON ; disable le reste
movwf PIE1
;===============================================================================================================
;PROG DU REGISTRE CCP1CON (BANK0)
;je vous fais un petit copier coller du datasheet pour le plaisir...
;bit 7-6: Unimplemented: Read as '0' -> dommage, ca aurait pu compliquer un peu !
;bit 5-4: CCP1X:CCP1Y: PWM Least Significant bits
;Capture Mode: Unused
;Compare Mode: Unused
;PWM Mode: These bits are the two LSbs of the PWM duty cycle. The eight MSbs are found in CCPRxL.
;bit 3-0: CCP1M3:CCP1M0: CCPx Mode Select bits
;0000 = Capture/Compare/PWM off (resets CCP1 module)
;0100 = Capture mode, every falling edge
;0101 = Capture mode, every rising edge
;0110 = Capture mode, every 4th rising edge
;0111 = Capture mode, every 16th rising edge
;1000 = Compare mode, set output on match (CCP1IF bit is set)
;1001 = Compare mode, clear output on match (CCP1IF bit is set)
;1010 = Compare mode, generate software interrupt on match (CCP1IF bit is set, CCP1 pin is unaffected)
;1011 = Compare mode, trigger special event (CCP1IF bit is set; CCP1 resets TMR1
;11xx = PWM mode
banksel CCP1CON
; ndegre bits: '76543210'
movlw B'00001010' ;bits 0-3 = 1010 -> mode COMPARE
movwf CCP1CON
banksel AA ;BANK1
movlw .200 ;duree du signal de RESET visible sur le PORTB,4
call Delay_ms
; bcf PORTB,4 ;POUR TEST: fin du signal de RESET visible sur le PORTB,4
;===============================================================================================================
;Initialisation_des_variables
N1 bcf INTCON, GIE ;->INT GLOBALE interdite
movlw .20 ;voir inttimer2
movwf rapcycl
banksel n_ph
clrf n_ph
clrf count0
movlw 200
movwf TMR0
clrf TMR1L
clrf TMR1H
movlw 128
movwf TMR2
movlw 100
clrf CCPR1H
movlw 1
movwf CCPR1L
bcf VTS_LENTE
bcf A_FOND
bsf DECOU_En
bcf STOP_ACCRO
bcf U_FAIBLE
movlw .200 ;duree du signal de RESET visible sur le PORTB,4
call Delay_ms
bsf INTCON, GIE ;->INT GLOBALE autorisee
;-----------------------------------------------------------------------
call STOP
;===============================================================================================================
;TESTS HARDWARE
;ici1 bcf PORTB,1
; call tp10ms
; bsf PORTB,1
; call tp10ms
; goto ici1
;===============================================================================================================
; BOUCLE_PRINCIPALE
;===============================================================================================================
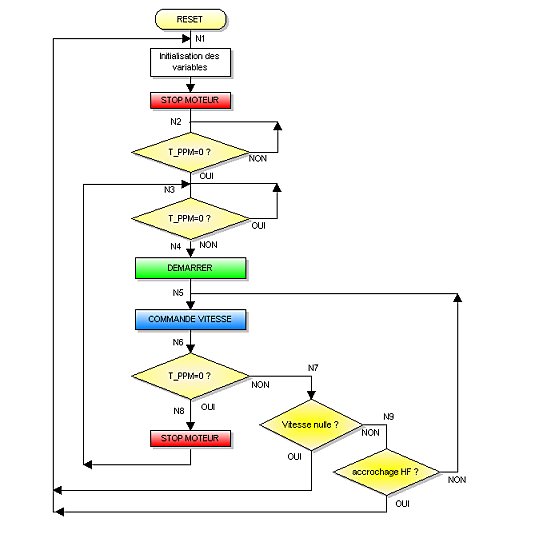
;Les numeros des noeuds N1,2... correspondent a ceux de l'organigramme
N2 call PPMzero? ;c=1 si oui
btfss STATUS,C
goto N2 ;non
goto N3 ;oui
N3 call PPMzero? ;c=1 si oui
btfss STATUS,C
goto N4 ;non
goto N3 ;oui
N4 goto demarre
N5 call REG_VIT
N6 call PPMzero? ;c=1 si oui
btfss STATUS,C
goto N7 ;non
goto N8 ;oui
N7 nop
if detecte_vts_lente == 1 ;voir directives en tout debut du listing
btfss VTS_LENTE ;vitesse lente ou moteur arrete ?
ENDIF
goto N9 ;non
goto N1 ;oui
N8 bsf STOP_RADIO ;pour stopper le MOTEUR
goto N3
N9 nop
if detecte_perio_z == 1
call perio_z? ;(c=1 si oui)
btfss STOP_ACCRO
ENDIF
goto N5 ;non
goto N1 ;oui
;===============================================================================================================
; DEBUT DES PROCEDURES
;===============================================================================================================
;Teste si T_PPM est inferieure a 90 ? (c=1 si oui)
PPMzero? movf T_PPM,w
sublw 91 ;90-w ; c=0 si neg ; c=1 si pos c.a.d si T_PPM<91
btfss STATUS,C ;(c=1 si oui)
bcf FREIN_En
btfsc STATUS,C ;
bsf FREIN_En
return ;si oui, c=1 et FREIN_En=1
;===============================================================================================================
;teste si periodeH,L < valeur mini (si accrochage HF) (c=1 si oui)
;RAPPEL: 1 pas de TMR1H,L = 20MHz/4/4 -> 0,8us
;cette routine ne me donne pas satisfaction ! le moteur ne peut pas prendre ses tours !
perio_z? movlw periodeH ;adresse de periodeH,L
call movxA
mot16B 20 ;20*0.8 = 16us ; si la periode est < 16us, on positionne 'c'
call compar16p ;B-A c=0 si negatif c.a.d si A>B
; btfsc STATUS,C ;(c=1 si oui)
; return
; bsf STOP_ACCRO
return
;===============================================================================================================
STOP bsf STOP_RADIO ;STOP
bcf INTCON,3 ;bit3 RBIE=0 -> disable INT du port RB4 a RB7 ; Le moteur ne peut redemarrer
;que par la routine 'demarre', et pas 'a la main'
call BLOQUE
return
;===============================================================================================================
;note: ce test est appele dans l'int timer0
V_mini? btfsc PORTB,3 ;PB3=1 si U<6V
bsf U_FAIBLE
btfss PORTB,3
bcf U_FAIBLE
return
;===============================================================================================================
;REGLAGE DE LA VITESSE (en fait, reglage du rapport cyclique de conduction des MOSFETS,
;ce qui entraine la variation de vitesse)
;calcul d'une fonction AH,L = F(T_PPM)
;fait sauter l'offset
REG_VIT movf T_PPM,w
movwf memo1
movlw 95 ; w:=95 T_PPM_G mini CETTE VALEUR EST A AJUSTER
subwf memo1,f ; f-w(c=0 si negatif) T_PPM_G:= T_PPM_G - 90 (pre-ofset)
btfss STATUS,C ; debordement ?
clrf memo1 ;oui ;memo1 n'est jamais <0
;memo1 est donc une fontion directe de T_PPM
;ici memo1 = [0..80]
;offset strictement positif
movlw 15 ;valeur minimale admise
addwf memo1,f
;ici memo1 = [15..95]
;-----------------------------------
;BEC = DETECTION TENSION D'ALIM FAIBLE
if stop_BEC == 1
btfss U_FAIBLE ;U faible ?
goto suite2 ;non
movlw 4 ;oui, brider vitesse moteur a une valeur fixe, faible, si l'accu est decharge (BEC)
movwf memo1
bcf A_FOND ;pour s'assurer que le decoupage aura bien lieu
goto suite3
endif
;-----------------------------------
;ARRET DU DECOUPAGE si manche des gaz a fond : pleine puissance.
;cette partie est sautee si le BEC est entre en limitation de vitesse
suite2 movlw 90
subwf memo1,w ; f-w(c=0 si negatif donc si memo1<90) w= memo1 - 90
btfsc STATUS,C ;memo1>=90 ?
bsf A_FOND ;oui
movlw 85 ;cette valeur differente de la precedente imtroduit un hysteresis dans le seuil
subwf memo1,w ; f-w(c=0 si negatif donc si memo1<90) w= memo1 - 85
btfss STATUS,C ;memo1>=90 ?
bcf A_FOND ;non
;-----------------------------------
suite3 movlw periodeH ;adresse de periodeH,L
call movxA ;AH,L:=periodeH,L
;on va borner la valeur obtenue a la valeur max atteinte par TMR1H,L compte tenu de la vitesse de rotation actuelle
;c.a.d de la periode actuelle max
;qui est memorisee dans periodeH,L par l'INT PORTB4-7
;le but est de ne pas decouper le signal de sortie a partir d'un instant situe au dela de sa duree maximale !
;REMARQUE: cette duree maximale de la periode EN COURS n'est pas connue d'avance !
;on prend donc en compte la duree de la periode precedente et on suppose que la periode en cours
;aura une duree tres proche, meme si le moteur accelere ou ralentit...
;La methode a ses limites (en cas de changement brutal du couple mecanique par exemple)
;toutefois, avec comme charge une helice d'avion, les changements de regime restent progressifs
;Le calcul est le suivant:
;CCPR1H,L = ( memo1 * periodeH,L )/95
;sachant que 95 represente la valeur max de memo1, lorsque memo1 = memo1_max = 95 on aura:
;CCPR1H,L = 95 * periodeH,L / 95 = periodeH,L
;on obtient donc pour memo1 une valeur [0..periodeH,L]
movlw -1 * 20 ;w=20 ;garde
addwf AL,f
btfss STATUS,C
decf AH,f ;ici AH,L:=periodeH,L -20
movf memo1,w
call multi24 ;mutiplication 8 bits x 16 bits de w par AH,L resultat (24bits) dans A2,1,0
;B:=A
movf A0,w
movwf Dividende
movf A1,w
movwf Dividende+1
movf A2,w
movwf Dividende+2
;ici Dividende= memo1 * periodeH,L
movlw 95 ;valeur de max de memo1
call Div24_8 ;Dividende / w -> Quotient (division 24bits par 8 bits resultat sur 24 bits)
;------------------------------------------------
;ecriture de la valeur dans le registre CCPR1L du module de COMPARAISON du PIC
;fonctionne avec le Timer1
;lorsque TMR1H,L (qui mesure le temps depuis l'INT PORB4-7) = CCPR1H,L, une interruption se produit
;qui decoupe le signal de sortie
;RAPPEL: l'INT PORB4-7 se produit quant a elle lors d'un front d'un des trois signaux BEMF
;et determine 2 actions:
;- RAZ du Timer1 (TMR1H,L:=0)
;- Debut de conduction d'une phase
movf Quotient,w
movwf CCPR1L
movf Quotient+1,w
movwf CCPR1H
return
;===============================================================================================================
; SOUS-ROUTINES d'INTERRUPTIONS
;===============================================================================================================
;int timer0
;utilise en PERIODEMETRE sur le signal PPM du recepteur de radiocommande
;la RAZ du timer0 se fait par l'intportB; en principe le timer0 ne deborde jamais, sauf emetteur sur OFF.
;20MHz/4/64= 78.125kHz (12.8us)
;12.8us*256=3.2768ms (temps max mesurable)
;en fait on doit mesurer une duree [1,1 ... 2,2 ms]
inttimer0 decfsz count0,f
goto fintimer0
bsf STOP_RADIO ;STOP MOTEUR pour arret si plus de signal de reception
fintimer0 call V_mini?
return
;===============================================================================================================
;int timer1
;TMR1H,L est utilise pour chronometrer la periode de l'enveloppe (1 pas moteur) et gere par l'intB4_7
;on passe ici si le moteur est a l'arret ou tourne a vitesse tres faible <100rpm
;voir prediv =1/4 (voir T1CON))
;20MHz -> 50ns
;20MHz/4/4 -> 0,8us
;THM1H,L peuvent compter 65536 soit: 53 ms
;Le moteur a fond sous 8V -> 10 000 rpm soit 1/(10000 /60 *6) -> 1ms de duree de cycle entre 2 INT PORTB4-7
;Le moteur a 3000 rpm soit 10/3000 = 3,3ms de duree de cycle entre 2 INT PORTB4-7
;Le moteur a 100 rpm soit 10/100 = 100ms de duree de cycle entre 2 INT PORTB4-7 soit presque 104ms (max)
;Donc la limite de la vitesse minimale mesurable est d'environ 200rpm
;10000rpm ->TRM1H,L max:= 1236
;3000 ->TRM1H,L max:= 3710
;200 ->TRM1H,L max:= 61826
inttimer1 bsf VTS_LENTE ;vitesse lente ou arret
fin_int1 return
;===============================================================================================================
;int module COMPARAISON
;on passe ici lorsque TMR1H,L = CCPR1H,L
intCompar btfsc A_FOND
goto FinIntCmp
btfss DECOU_En
goto FinIntCmp
call BLOQUE ;decoupage des signaux de sortie
FinIntCmp return
;===============================================================================================================
;int timer2
;pour decouper le signal de sortie a (relativement, 10kHz) haute frequence lors de la phase de demarrage
;ce timer fonctionne ici suivant 2 alternances consecutives de durees inegales, mais dont la somme est constante
inttimer2 btfss DECOUP_HF
goto fin_int2
btfss PHASE_HF
goto ph0
goto ph1
ph0 bsf PHASE_HF
movf rapcycl,w ;ici w=rapcycl
sublw .255 ;ici w=255-rapcycl
banksel PR2
movwf PR2
banksel AA
call BLOQUE ;bloque les MOSFETS du port A (pas le moteur!)
goto fin_int2
ph1 bcf PHASE_HF
movf rapcycl,w ;ici w=rapcycl
banksel PR2
movwf PR2
banksel AA
call sortie ;sortie physique des signaux vers les MOSFETS
goto fin_int2
fin_int2 return
;===============================================================================================================
;int Exterieure par bit 0 du port B
;detecte les fronts du signal PPM du recepteur de radio-commande
;mesure et memorise la duree des impulsions PPM de la voie gaz dans la variable T_PPM
intB0 btfss EDGE_PPM ;quel front vient-on de detecter ?
goto frontD ;le front descendant
frontM clrf TMR0 ;le front montant. RAZ Timer0
clrf count0
banksel OPTION_REG
bcf OPTION_REG,6 ;Interrupt on falling edge of RB0/INT pin (detectera le front descendant)
banksel AA ;BANK0
bcf EDGE_PPM ;pour eviter une lecture en bank1 au debut de cette procedure, on testera ce flag
return
frontD movf TMR0,w ;le timer0 a compte (l'horloge du PIC) depuis le front montant precedent
if vif == 1 ;voir directives en tout debut du listing
movwf T_PPM ;memorisation du temps mesure dans T_PPM, pour utilisation dans le reste du programme
else
;-----------------------------------------
;on va memoriser dans T_PPM le temps mesure, pour utilisation dans le reste du programme
;ici, plutot qu'une affectation directe et brutale (comme T_PPM:=TMR0), on va proceder
;par comparaison des deux valeurs, et on va faire tendre T_PPM vers TMR0 progressivement
;ceci dans le but d'eliminer les valeurs aberantes qui peuvent se presenter
;ce qui rendait la vitesse de rotation un peu fluctuante autour de certaines valeurs.
subwf T_PPM,w ; f-w(c=0 si negatif) w:= T_PPM - TMR0 (c=0 si TMR0 > T_PPM)
btfsc STATUS,Z
goto intB0_1 ;si egalite, on ne fait rien
btfsc STATUS,C
decf T_PPM,f
btfss STATUS,C
incf T_PPM,f
endif
;-----------------------------------------
intB0_1 nop
banksel OPTION_REG
bsf OPTION_REG,6 ;(detectera le front montant)
banksel AA ;BANK0
bsf EDGE_PPM
clrf TMR0
clrf count0
return
;===============================================================================================================
;int Exterieure par bits 4a7 du port B
;detecte les fronts des 3 signaux de BEMF
;REMARQUE: contrairement a l'intRB0, les INT RB4-7 sont declenchees par les fronts montants ET descendants
;sans que l'on puisse choisir lequel
;RAPPEL: TMR1H,L est compteur 16 bits du timer1 (voir plus haut l'inttimer1)
intB4_7 movf TMR1H,w
if integration_PPM == 1 ;voir directives en tout debut du listing
addwf periodeH,f ;integre et memorise la valeur mesuree de la periode de rotation
rrf periodeH,f ;/2
;il s'agit donc de la valeur maximale de TMRH,L d'autant plus grande que la vitesse est faible
movf TMR1L,w
addwf periodeL,f
rrf periodeL,f
else
movf TMR1H,w
movwf periodeH ;memorise la valeur mesuree de la periode de rotation
;il s'agit donc de la valeur maximale de TMRH,L d'autant plus grande que la vitesse est faible
movf TMR1L,w
movwf periodeL
endif
clrf TMR1H
clrf TMR1L ;depart de la mesure suivante
saut2 call pasMot1 ;prepare l'enveloppe du signal
call sortie
return
;===============================================================================================================
; PROCEDURES de commande moteur
;===============================================================================================================
;cette routine est appelee par l'int ext: intB4_7
;genere l'enveloppe du signal qui sera sorti par l'intimer2
pasMot1 movlw HIGH Tab_Ph
movwf PCLATH
movf n_ph,w
call Tab_Ph ;retourne la valeur de l'octet dans w
movwf signal ;signal pour commande des MOSFETs. sera utilise par intTimer2
IF stops == 1 ;voir directives en tout debut du listing
btfsc STOP_RADIO
clrf signal
; btfsc STOP_ACCRO
; clrf signal
ENDIF
incf n_ph,f
movlw 6 ;butee max
subwf n_ph,w ;w-f(c=0 si negatif)
btfsc STATUS,C
clrf n_ph
return
;===============================================================================================================
;bloque electriquement tous les MOSFETS relies au PORT A (uniquement) sauf pendqnt le freinage moteur
BLOQUE btfsc FREIN_En
return
movlw B'00001010'
movwf PORTA
return
;===============================================================================================================
;SORTIE PHYSIQUE DES SIGNAUX VERS LES MOSFETS
sortie nop
if frein_permis == 1 ;voir directives en tout debut du listing
btfsc FREIN_En
goto frein
ENDIF
movlw B'00001111' ;bits concernant le PORT A
andwf signal,w ;ne touche pas signal
xorlw B'00001010' ;les MOSFETS cote(+) sont pilotes par des transistors inversant la phase
movwf PORTA
btfss signal,4
bcf PORTB,1
btfsc signal,4
bsf PORTB,1
btfss signal,5
bsf PORTB,2 ;inverse le bit
btfsc signal,5
bcf PORTB,2 ;inverse le bit
return
frein bsf PORTB,2 ;bloque Q6 (MOSFET cote(+))
bsf PORTB,1 ;puis ensuite sature Q5 (MOSFET cote(-))
movlw B'00001111' ;sature les transistors cote(-), bloque ceux cote(+) (MOSFETS Q1,2,3,4)
movwf PORTA
return
;===============================================================================================================
;demarrage force du moteur. On ne passe ici que sur action du manche des GAZ en partant de zero
; ATTENTION: routine appelee par un goto (N4 dans bcl pincipale) et pas par un call.
; ne se termine donc pas par un return, mais par un goto N5
; permet de gagner un niveau dans de pile, mais surtout permet de retourner ailleurs en cas d'arret d'urgence
demarre bcf STOP_RADIO
bcf VTS_LENTE
bcf STOP_ACCRO
bcf INTCON,3 ;bit3 RBIE=1 -> desable INT du port RB4 a RB7
bsf DECOUP_HF ;decoupage HF pendant le demarrage force
banksel PIR1
bsf PIR1,TMR2IE ;enable INT Timer2 pour decouper les signaux en HF pendant le demarrage
banksel AA ;BANK0
bsf INTCON,GIE ;enable INT's
movlw 20 ;20
movwf AA
;======================================
dema1 movlw 4 ;8
movwf BB
call PPMzero? ;c=1 si oui
btfss STATUS,C
goto dema2 ;non
bsf STOP_RADIO ;oui, arret d'urgence et retour
call BLOQUE ;moteur en roue libre
bcf DECOUP_HF ;plus de decoupage 10kHz
banksel PIR1
bcf PIR1,TMR2IE ;disable INT Timer2
banksel AA ;BANK0
bsf DECOU_En ;decoupage PWM
bsf INTCON,RBIE ;enable INT du port RB4 a RB7; passe le cycle en mode automatique
goto N8 ;VERS boucle principale
;--------------------------
dema2 call pasMot1
call sortie
;pendant la phase de demarrage, les signaux sont physiquement sortis par l'int timer2 (qui decoupe en HF)
movlw 2
addwf AA,w
call Delay_ms ;delai proportionnel a AA +2 donc qui decroit avec AA -> f augmente
decfsz BB,f
goto dema2 ;boucle interieure courte, BB fois
;--------------------------
decfsz AA,f
goto dema1 ;boucle exterieure, AA fois
;======================================
bsf DECOU_En ;decoupage PWM
bsf INTCON,RBIE ;enable INT du port RB4 a RB7; passe le cycle en mode automatique
call BLOQUE ;moteur en roue libre
bcf DECOUP_HF ;plus de decoupage 10kHz
banksel PIR1
bcf PIR1,TMR2IE ;disable INT Timer2
banksel AA ;BANK0
movlw 128
movwf CCPR1L
movlw 120
movwf CCPR1H
movlw 10
call Delay_ms
bcf STOP_RADIO
bcf VTS_LENTE
goto N5 ;vers appelant dans la boucle principale
;===============================================================================================================
; ROUTINES MATH
;===============================================================================================================
;conversion sexadecimale -> binaire
;entree: AA, BB
;resultat: AH,AL = 60*AA+BB
convhbin movlw 60
call multi16 ;AA contient la donnee a multiplier
movf BB,w
addwf AL,f
btfsc STATUS,C
incf AH,f
return
;===============================================================================================================
;mutiplication 8 bits x 8 bits de w par AA (donnees sur 1 octet)
;d'apres note AN526 Microchip
;resultat (sur 2 octets) dans AH,AL (poids fort et poids faible)
;principe: exactement celui de la multiplication faite 'a la main'
;decallages (donc multiplications par le poids de chaque bit) et additions si le bit est un '1'
multi16 clrf AH ;RAZ de AH qui est ainsi pret a servir pour receptionner le resultat (poids fort)
movwf AL ;memo temporaire du contenu de w, on a en effet besoin de w a la ligne suivante
movlw 8 ;pour charger une constante dans le compteur de boucle (8 passes)
movwf count1 ;compteur de passages dans la boucle
movf AL,w ;on remet la valeur sauvegardee temporairement dans AL dans w
clrf AL ;RAZ de AL qui est ainsi pret a servir pour receptionner le resultat (poids faible)
bcf STATUS,C ;RAZ carry
loopm16 rrf AA,f ;lecture d'un bit de AA
btfsc STATUS,C
addwf AH,f ;si c' est un '1' on ajoute w a AH
rrf AH,f ;on decalle AH (poids forts) vers la droite, le bit de droite tombe dans c
rrf AL,f ;le bit de droite est recupere dans AL
decfsz count1,f ;compte les passages dans la boucle count1 = 0?
goto loopm16 ;non, on boucle
return ;oui, on sort
;===============================================================================================================
;multi24 ;mutiplication 8 bits x 16 bits de w par AH,L
;resultat 24bits (sur 3 octets) dans A2,1,0
;principe: exactement celui de la multiplication faite 'a la main'
;decallages (donc multiplications par le poids de chaque bit) et additions si le bit est un '1'
;remarque: CAPACITE MAX:
;AH,L:=255,255 =65535 = 2^16 -1
;w:=255 =2^8 -1
;w * AH,L := 16711425 = (254,255,1) et pas (255,255,255)
multi24 clrf A2 ;RAZ de A2 qui est ainsi pret a servir pour receptionner le resultat (poids fort)
clrf A1 ;RAZ de A1 qui est ainsi pret a servir pour receptionner le resultat
movwf A0 ;memo temporaire du contenu de w, on a en effet besoin de w a la ligne suivante
movlw 16 ;pour charger une constante dans le compteur de boucle (16 passes)
movwf count1 ;compteur de passages dans la boucle
movf A0,w ;on remet la valeur sauvegardee temporairement dans AL dans w
clrf A0 ;RAZ de AL qui est ainsi pret a servir pour receptionner le resultat (poids faible)
loopm24 bcf STATUS,C ;RAZ carry
rrf AH,f ;decallage a droite, le bit de droite tombe dans c
rrf AL,f ;decallage a droite avec recup du bit ci-dessus, le bit de droite tombe dans c
btfsc STATUS,C ;lecture d'un bit de AH,L ; test de ce bit
addwf A2,f ;si c' est un '1' on ajoute w a A2
rrf A2,f ;on decalle A2 (poids forts) vers la droite, le bit de droite tombe dans c
rrf A1,f ;le bit de droite de A2 est recupere dans A1
rrf A0,f ;le bit de droite de A1 est recupere dans A0
decfsz count1,f ;compte les passages dans la boucle count1 = 0?
goto loopm24 ;non, on boucle
return ;oui, on sort
;===============================================================================================================
;division d'une valeur codee sur 16 bits (AH,AL) par 2
divi2 bcf STATUS,C ;RAZ carry
rrf AH,f ;le bit de poids faible tombe dans -> c ; le bit de poids fort de AH devient nul
rrf AL,f ;le bit de poids faible de AH devient le bit de poids fort de AL
return
;===============================================================================================================
;division 24 bits par 8 bits
;(auteur I.M.B que je remercie)
Div24_8 movwf Diviseur
movlw 24
movwf Compteur1
clrf Aux+0
rlf Dividende+0,f
rlf Dividende+1,f
rlf Dividende+2,f
Div24_81 rlf Aux+0,f
rlf Aux+1,f
movf Diviseur,w
subwf Aux,w
btfsc Aux+1,0
bsf STATUS,C
btfsc STATUS,C
movwf Aux
rlf Dividende+0,f
rlf Dividende+1,f
rlf Dividende+2,f
decfsz Compteur1,f
goto Div24_81
return
;===============================================================================================================
;addition 16bits
;(AH,AL)+(BH,BL) -> (AH,AL)
add16A movf BL,w
addwf AL,f ;(f+w) -> dest ; c=1 si retenue (a traiter)
btfsc STATUS,C
incf BH,f ;ajout retenue
movf BH,w
addwf AH,f ;(f+w) -> dest ; c=1 si retenue
return
;===============================================================================================================
;addition 16bits
;(AH,AL)+(AH,AL) -> (BH,BL)
;remarque seule la destination (B) est differente par rapport a la procedure add16A
add16B movf AL,w
addwf BL,f ;(f+w) -> dest ; c=1 si retenue (a traiter)
btfsc STATUS,C
incf AH,f ;ajout retenue
movf AH,w
addwf BH,f ;(f+w) -> dest ; c=1 si retenue
return
;===============================================================================================================
;complement a deux de la variable codee sur 2 octets situes aux adresses w et w+1
cpl16x movwf FSR
comf INDF,f ;w=complement (H)
incf FSR,f
comf INDF,f ;w=complement (L)
incf INDF,f ;w=complement a 2 de L
btfss STATUS,Z
return
decf FSR,f ;pointe H
incf INDF,f ;retenue
return
;===============================================================================================================
;mov la variable codee sur 2 octets situes aux adresses w et w+1 dans -> AH,AL
;ATTENTION: AL doit etre stocke en RAM a (adresse de AH) +1
movxA movwf FSR
movf INDF,w
movwf AH
incf FSR,f
movf INDF,w
movwf AL
return
;===============================================================================================================
;mov AH,AL dans -> la variable codee sur 2 octets situes aux adresses w et w+1
;ATTENTION: AL doit etre stocke en RAM a (adresse de AH) +1
movAx movwf FSR
movf AH,w
movwf INDF
incf FSR,f
movf AL,w
movwf INDF
return
;===============================================================================================================
;mov la variable codee sur 2 octets situes aux adresses w et w+1 dans -> BH,BL
;ATTENTION: BL doit etre stocke en RAM a (adresse de BH) +1
movxB movwf FSR
movf INDF,w
movwf BH
incf FSR,f
movf INDF,w
movwf BL
return
;===============================================================================================================
;mov BH,BL dans -> la variable codee sur 2 octets situes aux adresses w et w+1
;ATTENTION: BL doit etre stocke en RAM a (adresse de BH) +1
movBx movwf FSR
movf BH,w
movwf INDF
incf FSR,f
movf BL,w
movwf INDF
return
;===============================================================================================================
;comparaison de deux valeurs codees sur 16 bits (AH,L a BH,L)
;resultat dans STATUS carry et zero
;les valeurs doivent representer des nombres tous deux positifs (pas ok si valeurs codees en complement a 2
;sauf pour le test d'egalite STATUS,Z ('z') ) ;16p-> p comme positifs
;les valeurs des flags c et z qui sont retournees sont les meme que celles de l'instruction subwf
;z indiquant l'egalite et c=o si negatif c.a.d si A>B
compar16p movf AH,w
subwf BH,w ;f-w c.a.d B-A c=0 si neg donc si AH>BH
btfss STATUS,Z ;z=1 si AH=BH il faut alors comparer AL a BL
return
movf AL,w
subwf BL,w ;z=1 si AL=BL et comme on sait deja que AH=BH, si z=1 -> A=B
return
;===============================================================================================================
;comparaison de deux valeurs codees sur 24 bits (A2,1,0 a B2,1,0)
;resultat dans STATUS carry et zero
;les valeurs doivent representer des nombres tous deux positifs (pas ok si valeurs codees en complement a 2
;sauf pour le test d'egalite STATUS,Z ('z') ) ;16p-> p comme positifs
;les valeurs des flags c et z qui sont retournees sont les meme que celles de l'instruction subwf
;z indiquant l'egalite et c=o si negatif c.a.d si A>B
compar24p movf A2,w
subwf B2,w ;f-w c=0 si neg donc si AH>BH
btfss STATUS,Z ;z=1 si A2=B2 il faut alors comparer A1 a B1
return
movf A1,w
subwf B1,w
btfss STATUS,Z ;z=1 si A1=B1 et comme on sait deja que A2=B2, il faut alors comparer A0 a B0
return
movf A0,w
subwf B0,w ;z=1 si A0=B0 et comme on sait deja que A2,1=B2,1, si z=1 -> A=B
return
;===============================================================================================================
;DATA EN EEPROM
;===============================================================================================================
;ORG 0x2100 ; zone EEPROM
;===============================================================================================================
end