PFD (Primary Flight Display) pour Flightgear - ESP32
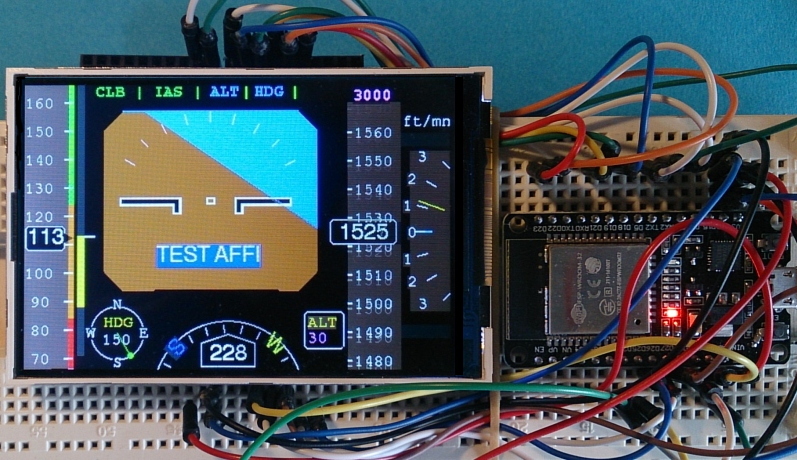
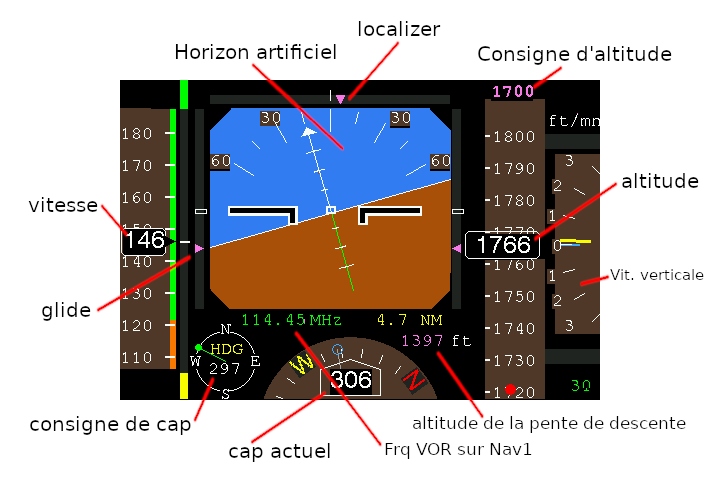
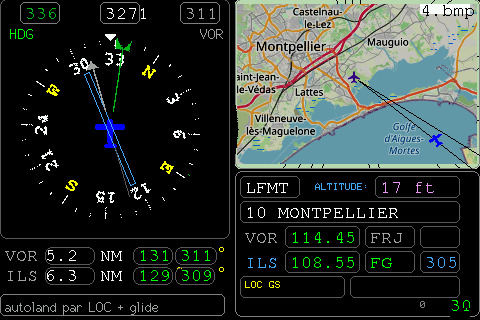
Horizon artificiel +Compas, Altitude, Vitesse, réglages autopilot, ILS pour Flightgear, simulateur de vol Open Source. Puissance ESP32.
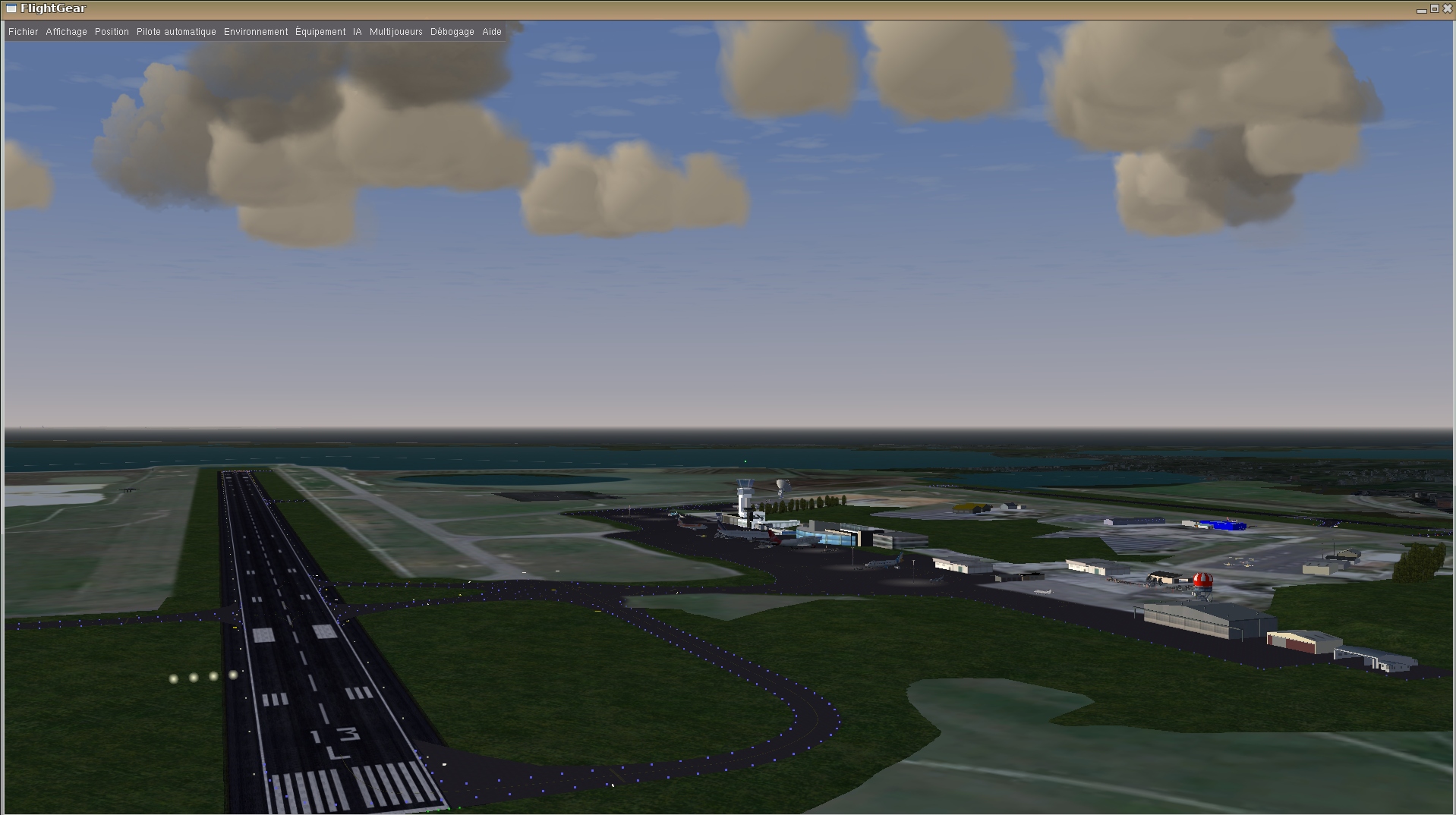
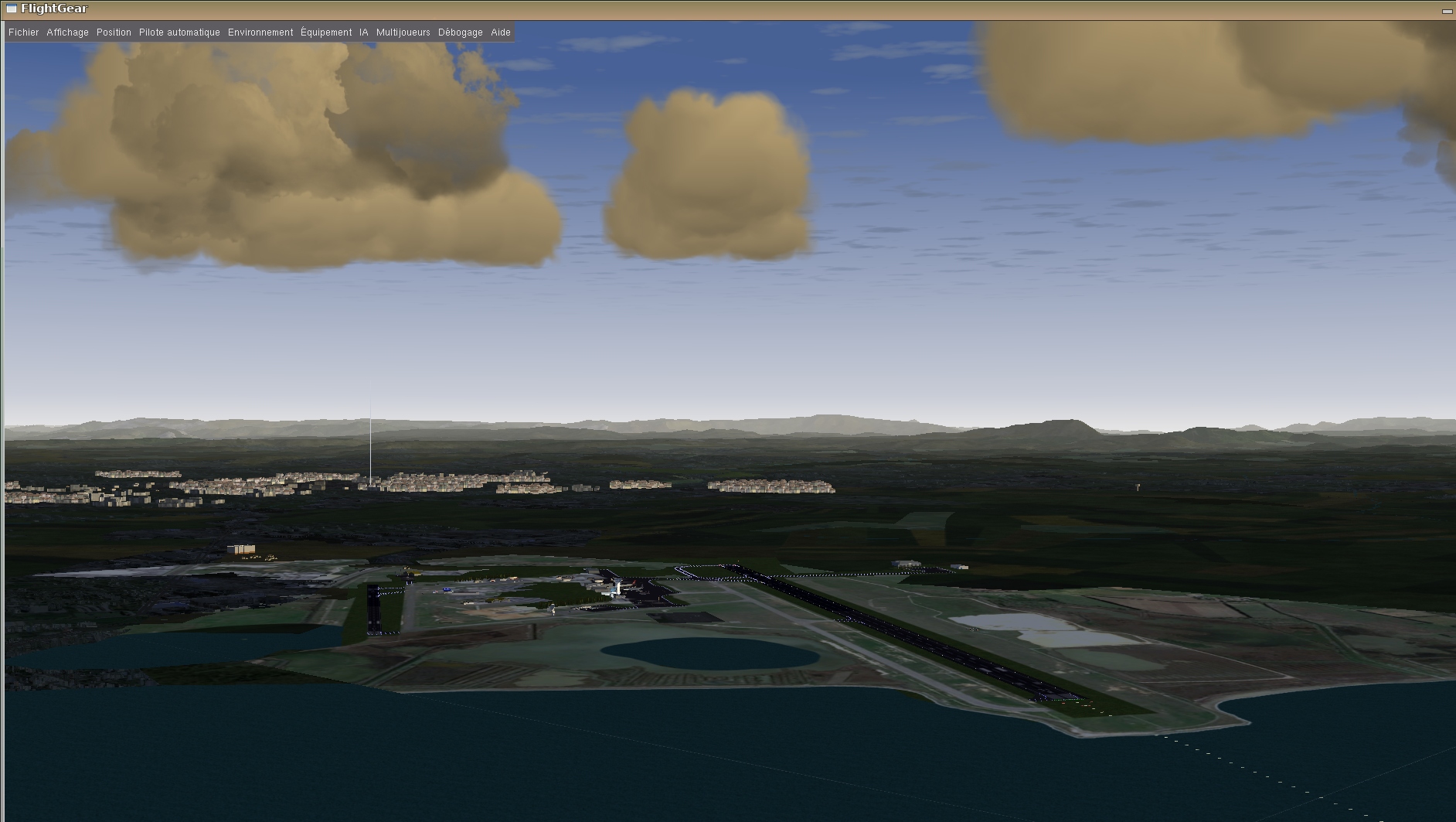
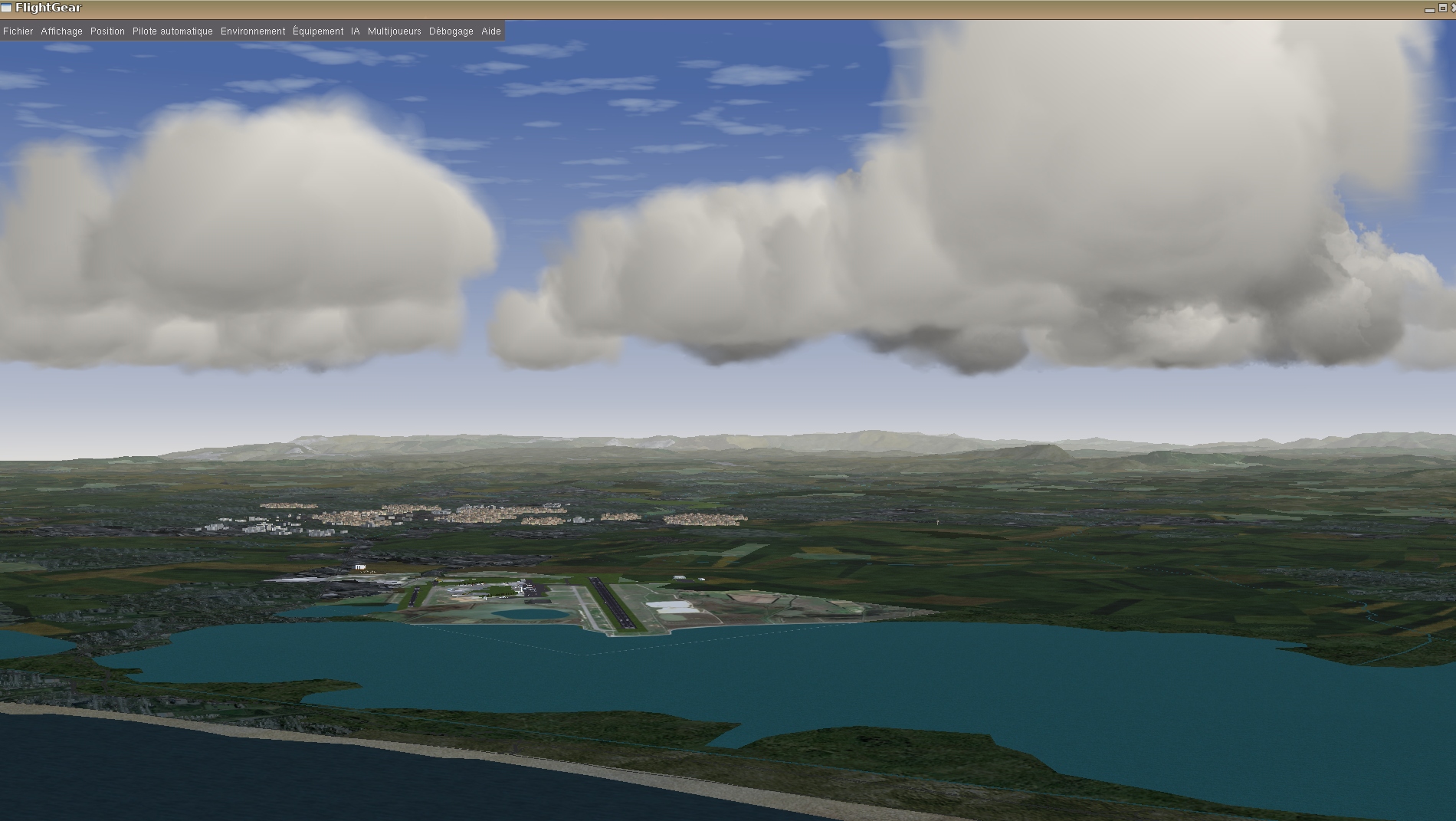
1 Un aperçu en vidéo (LFMT)
VIDEO
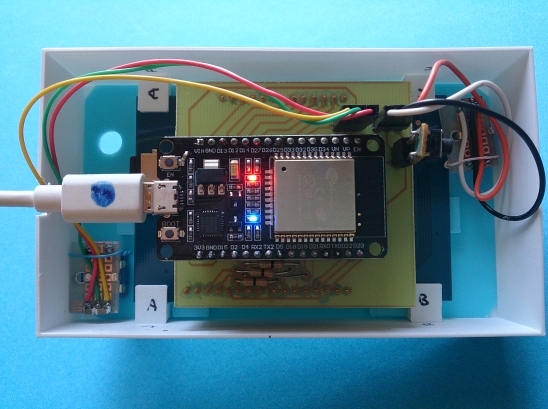
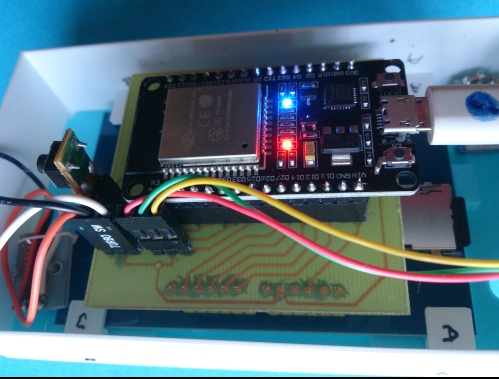
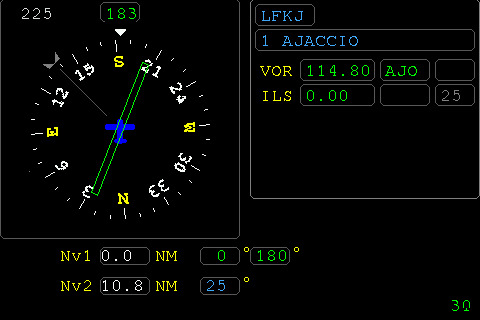
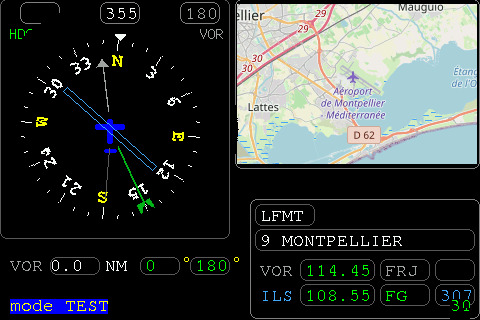
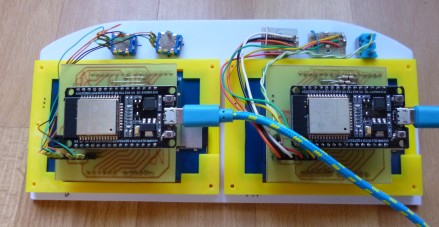
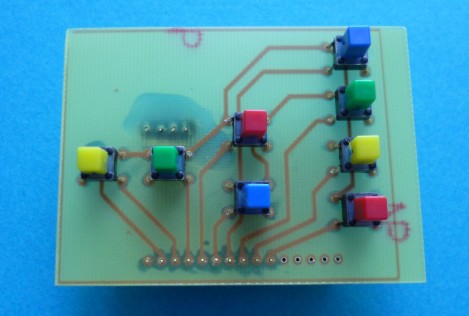
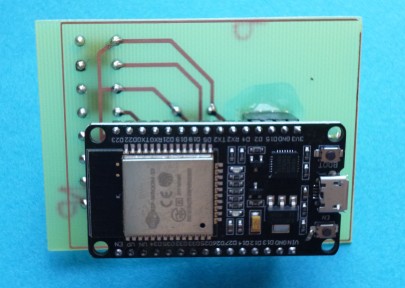
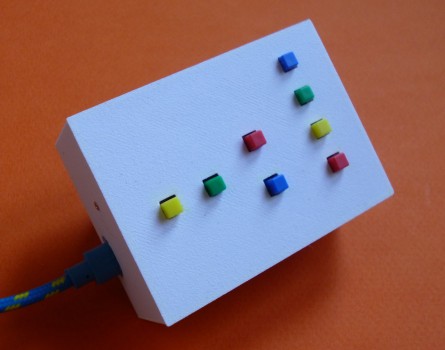
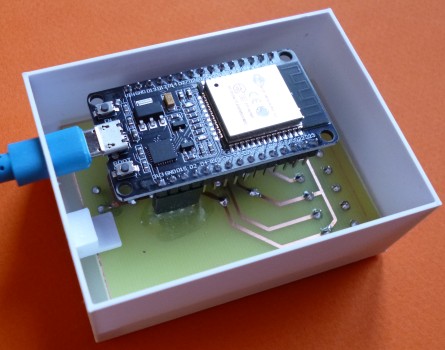
2 Vue d'ensemble de cette réalisation :
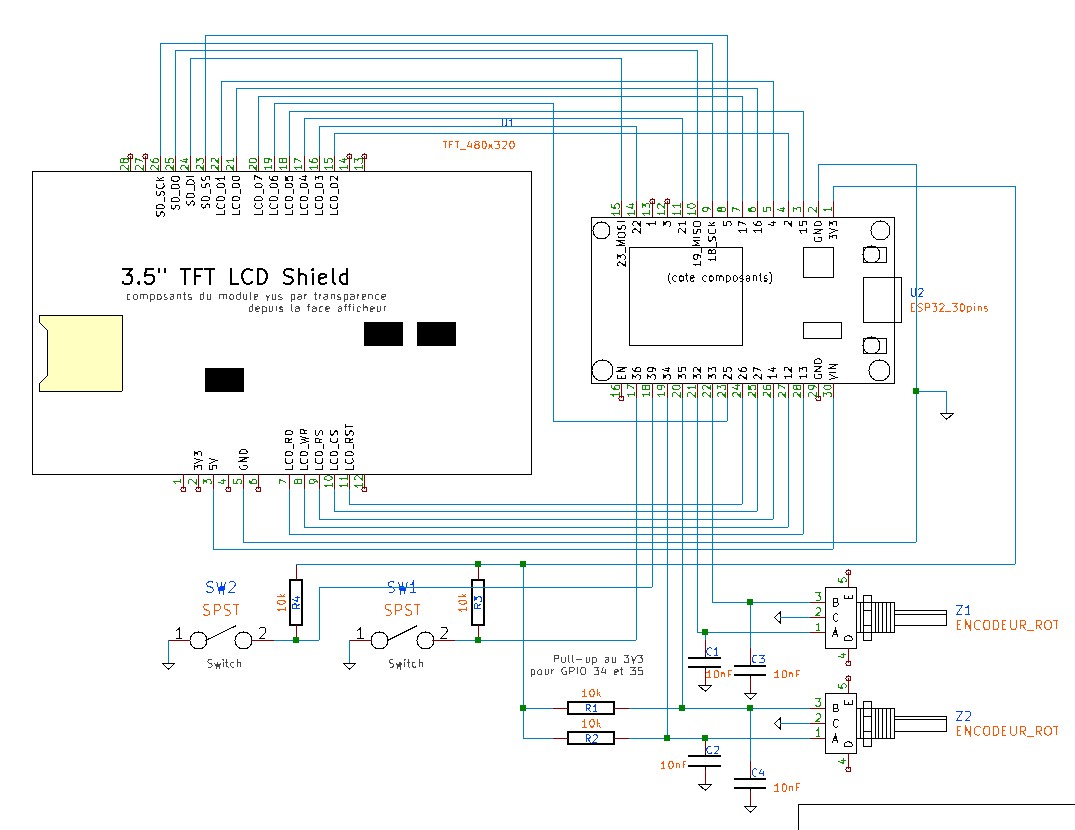
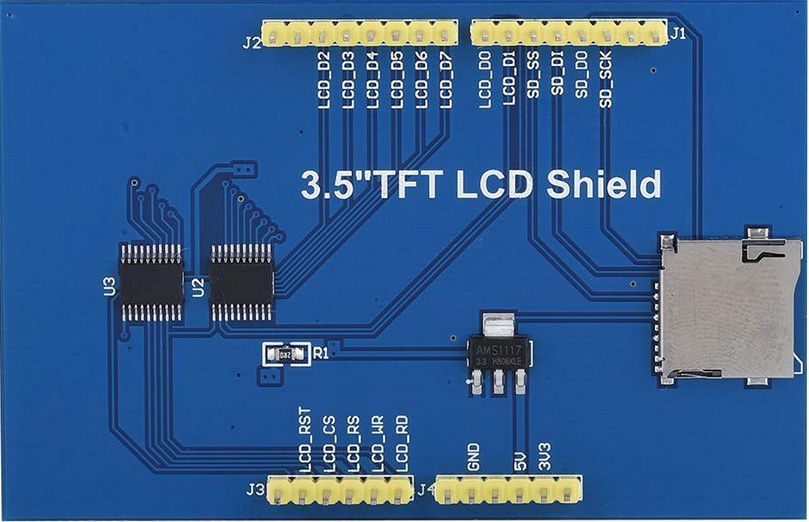
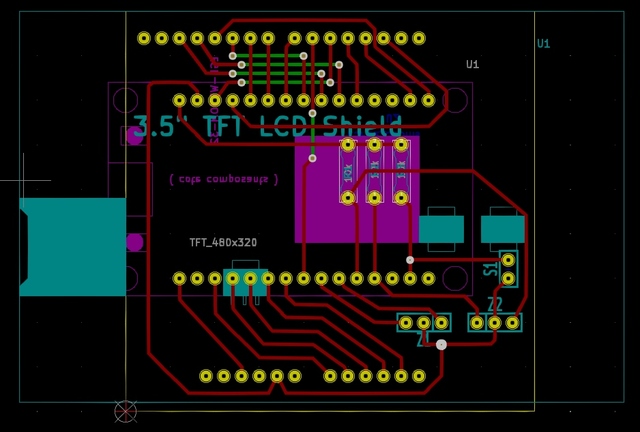
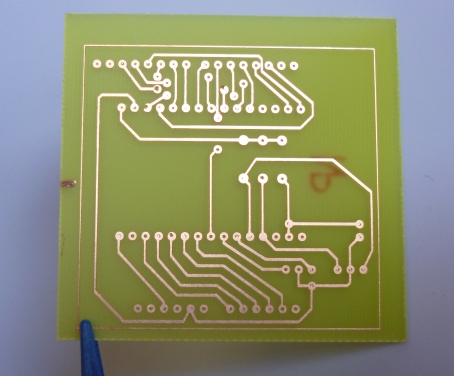
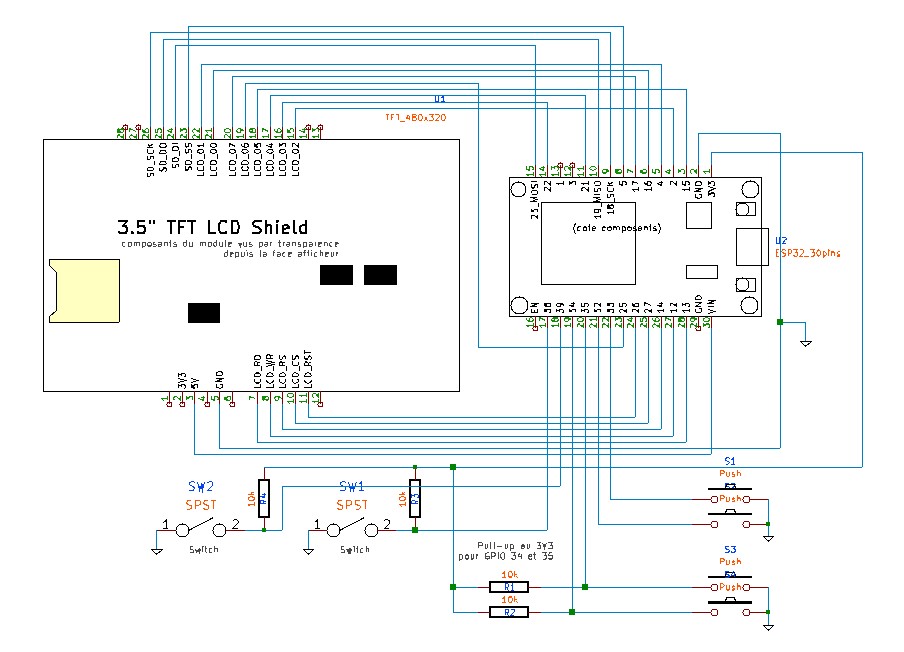
3 Le schéma
4 Le programme pour l'ESP32 à compiler avec l'IDE Arduino
CODE SOURCE du PFD en C++
//
// ==================================
String version= "36.4" ;
// ==================================
/*
PFD.ino - Primary Flight Display pour Flightgear et ESP32 - version Afficheur TFT 480x320
Ne concerne pas un avion réel ! (ni ULM...)
N'est pas destiné à un quelconque apprentissage du pilotage d'un avion réel (les instruments sont une vue d'artiste)
l'artiste c'est moi !
Les appellations des modules (SD, MCDU) ne correspondent pas non plus exactement à la réalité.
Mais rien ne vous interdit de modifier tout ça le cas échéant, vous avez le code source.
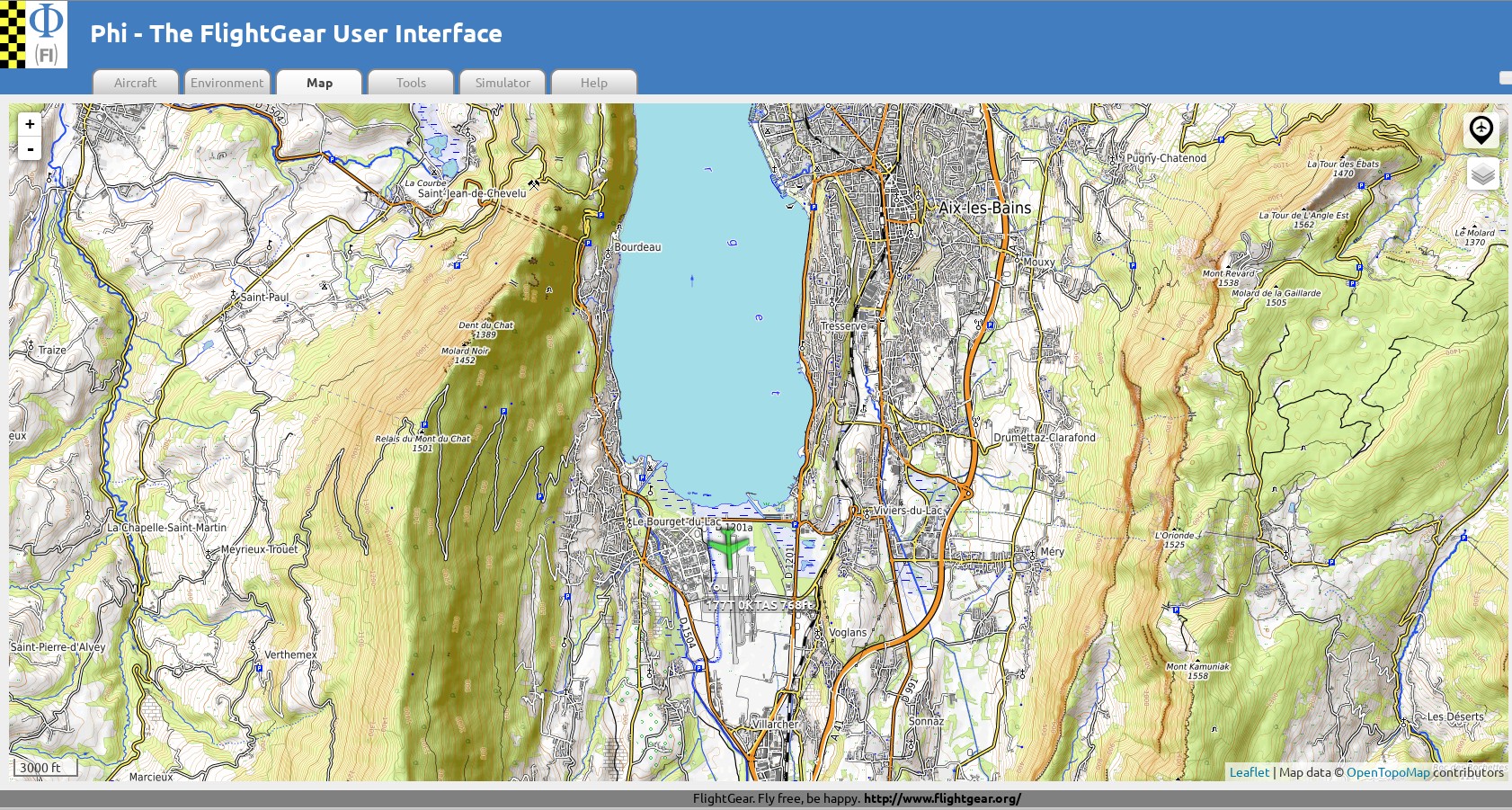
Fonctionne avec le simulateur FlightGear sous Linux et avec l'avion Citation X (mon préféré!)
Les autres avions ont un autopilot différent et donc une "Property tree" différente, il faudrait adapter le programme
- en particulier ne fonctionne pas tel-quel avec les B7xx ni les A3xx, à vous de jouer !
par Silicium628
*/
/**---------------------------------------------------------------------------------------
Logiciel libre et gratuit : Pour les #includes issus de l'univers Arduino (que je ne fournis pas), il faut voir au cas par cas.
(drivers d'affichage en particulier)
---------------------------------------------------------------------------------------
De petites images à placer sur la SDcard centrées sur les aérodromes proviennent de OpenStreetMap
OpenStreetMap® est un ensemble de données ouvertes,
disponibles sous la licence libre Open Data Commons Open Database License (ODbL)
accordée par la Fondation OpenStreetMap (OSMF).
Voir ce lien pour plus de détails :
https://www.openstreetmap.org/copyright
--------------------------------------------------------------------------------------**/
/*=====================================================================================================
CONCERNANT L'AFFICHAGE TFT : connexion :
( Pensez à configurer le fichier User_Setup.h de la bibliothèque ~/Arduino/libraries/TFT_eSPI/ )
les lignes qui suivent ne sont q'un commentaire pour vous indiquer la config à utiliser
placée ici, elle ne sont pas fonctionnelles
Il FAUT modifier le fichier User_Setup.h installé par le système Arduino dans ~/Arduino/libraries/TFT_eSPI/
// ESP32 pins used for the parallel interface TFT
#define TFT_CS 27 // Chip select control pin
#define TFT_DC 14 // Data Command control pin - must use a pin in the range 0-31
#define TFT_RST 26 // Reset pin
#define TFT_WR 12 // Write strobe control pin - must use a pin in the range 0-31
#define TFT_RD 13
#define TFT_D0 16 // Must use pins in the range 0-31 for the data bus
#define TFT_D1 4 // so a single register write sets/clears all bits
#define TFT_D2 2 // 23
#define TFT_D3 22
#define TFT_D4 21
#define TFT_D5 15 // 19
#define TFT_D6 25 // 18
#define TFT_D7 17
=====================================================================================================
Notes :
- Si les data de FG ne sont pas reçues, il faut vérifier que le PFD est bien connecté sur le port USB0 (et pas USB1 ou autre...)
- Le module PFD doit impérativement être lancé et connecté à l'USB_0 avant de lancer Flightgear et non l'inverse
sinon le dialogue USB avec l'ordinateur ne se fera pas.
*/
// v14 la fonction Autoland() utilise le glide pour la descente et non plus une altitude calculée théorique
// v15.2 modif du fichier hardware4.xml (nav-distance)
// v15.3 revu autoland - possibilité de poser auto si localizer seul (aérodrome non équipé de glide de glide).
// v15.6 nombreuses modifs dans tous les fichiers, dont fichier FG_data.h
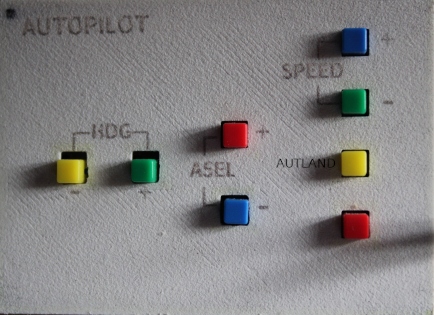
// v16.0 prise en charge du module "SW" (boutons poussoirs) par WiFi
// v16.2 prise en charge des 2 nouveaux boutons (target_speed) + le fichier "hardware4.xml" a été modifié en conséquence
// v20.0 autoland possible (par GPS au lieu de l'ILS) même pour aérodromes non équipé ILS
// v21.0 autoland toujours calculé par GPS, avec prise en compte de l'altitude de l'aérodrome
// v22.0 modifs fonction autolang & fichier 'hardware4.xml' (prise en charge du trim de profondeur, voir 'desengage_autoland()'
// v24.2 tous les calculs de position et de direction se font directement avec les coordonnées GPS,
// sans passer par système LAMBERT
// v26.0 prise en compte de la longueur de la piste pour l'autolanding
// v26.2 asservissement (facultatif) de la gouverne de direction et de la roue avant au décollage et à l'atterrissage
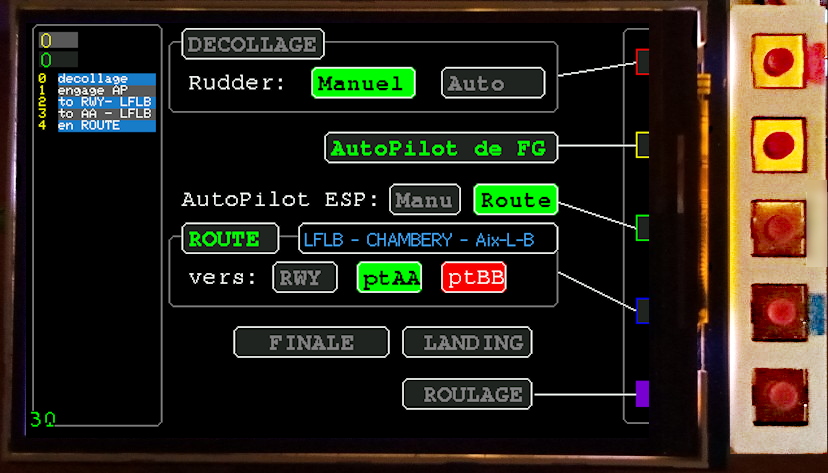
// v30.3 le module MCDU associé à ce PFD et au module ND permettent :
// -un décollage entièrement automatique, avec engagement automatique de l'autopilot et la mise en palier
// -une route automatique vers un point d'entrée en finale situé à 10NM d'une autre piste choisie pendant le vol
// -la gestion de la finale avec pente à 5%, l'arrondi, le touché de roues sur train principal et le guidage en lacet sur la piste
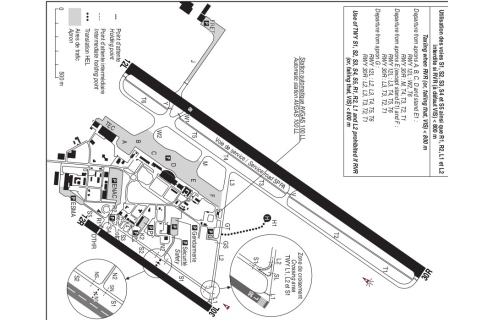
// Un aérodrome m'a posé quelques soucis : LFLB Chambéry. La finale se fait avec un pente nettement plus accentuée,
// au dessus du lac, en évitant d'abimer la montagne ! Le point d'entrée en finale se situe alors
// à 8 NM de la piste depuis une hauteur + importante (voir le fichier FG_data.h)
// v30.9 entré-sortie auto du train d'atterrissage (et modif dans le fichie "hardware4.xml")
// v31.0 gestion des freins (freine automatiquement à l'atterrissage)
// v35.0 Asservissement du roulis (maintient les ailes à plat) lors de phase de décollage et d'atterrissage
// deux modes d'atterrissage : long (=normal) et court (freine à fond + reverses).
// tous les fichiers sont donc affectés (même le fichier hardware4.xml qui comporte de nouvelles entrées)
/* les numéros de version de tous les modules doivent être identiques (le contenu du .zip est cohérent) */
/** un peu de théorie : ****************************
ALTITUDE vs HAUTEUR
Une hauteur est la distance verticale entre un aéronef et la surface qu'il survole (terre ou eau).
Pour exprimer une hauteur, il est défini les hauteurs AGL (Above Ground Level) ou ASFC (Above Surface).
Il s'agit de la hauteur entre l'avion et le sol juste en dessous de sa position. Elle suit donc le relief.
Pour exprimer une hauteur au dessus de l'aérodrome, il est défini la hauteur AAL (Above Aerodrome Level).
Il s'agit de la hauteur entre l'avion et le point de référence de l'aérodrome comme s'il était en dessous de la
position de l'appareil (même s'il n'y est pas). Cette hauteur ne suit pas le relief.
source : https://aeroclub-narbonne.com/download/2017/04/BASE_ALT.pdf
IVAO TM © ELH FLA septembre 2014
je conseille de lire et relire l'ensemble de ce PDF.
*****************************************************/
#include "PFD.h"
#include <stdint.h>
#include <TFT_eSPI.h> // Hardware-specific library
#include "Free_Fonts.h"
#include "FS.h"
#include "SD.h"
#include "SPI.h"
#include "FG_data.h"
#include "Fonctions1.h"
#include <WiFi.h> // Ce PFD est un serveur WiFi
#include "ESPAsyncWebServer.h"
const char * ssid = "PFD_srv" ;
const char * password = "72r4TsJ28" ;
AsyncWebServer server( 80 ) ; // Create AsyncWebServer object on port 80
String argument_recu1;
String argument_recu2;
String argument_recu3;
TFT_eSprite SPR_E = TFT_eSprite( & TFT480) ; // Declare Sprite object "SPR_11" with pointer to "TFT" object
TFT_eSprite SPR_N = TFT_eSprite( & TFT480) ;
TFT_eSprite SPR_O = TFT_eSprite( & TFT480) ;
TFT_eSprite SPR_S = TFT_eSprite( & TFT480) ;
TFT_eSprite SPR_trajectoire = TFT_eSprite( & TFT480) ;
VOYANT voyant_L; // Localizer (azimut)
VOYANT voyant_G; // Glide (hauteur)
VOYANT voyant_APP; // Approche auto (= attéro ILS)
VOYANT voyant_route;
VOYANT voyant_RD; // Auto rudder (asservissement de la gouverne de direction (lacet) et de la roulettes de nez au sol)
VOYANT voyant_ATT; // atterrissage en cours
Led Led1;
Led Led2;
Led Led3;
Led Led4;
Led Led5;
uint16_t hauteur_mini_autopilot = 100 ; // ou 300, ou 500, à tester...
int16_t Ax_actu, Ay_actu;
int16_t Bx_actu, By_actu;
//position et dimensions de l'horizon artificiel
#define HA_x0 210
#define HA_y0 130
#define HA_w 120 // demi largeur
#define HA_h 100 // demi hauteur
#define x_autopilot 320
// Width and height of sprite
#define SPR_W 14
#define SPR_H 14
// =====================================================================
//mémorisation dex pixels deux lignes H et de deux lignes V
//ce qui permet d'afficher un rectangle mobile sur l'image sans l'abimer
uint16_t data_L1[ 480 ] ; // pixels d'une ligne Horizontale
uint16_t data_L2[ 480 ] ; // pixels d'une autre ligne Horizontale
uint16_t data_C1[ 320 ] ; // pixels d'une ligne Verticale ('C' comme colonne)
uint16_t data_C2[ 320 ] ; // pixels d'une autre ligne Verticale
uint16_t x_1; // position reçu du module positionneur_XY
uint16_t x_2; // position reçu du module positionneur_XY
uint16_t y_1;
uint16_t y_2;
uint16_t memo_x1;
uint16_t memo_y1; // position de la ligne
uint16_t memo_x2;
uint16_t memo_y2;
// =====================================================================
uint32_t memo_micros = 0 ;
uint32_t temps_ecoule;
uint16_t nb_secondes= 0 ;
uint8_t nb_acqui;
String parametre; //garde en mémoire les données reçues par USB entre les passages dans la fonction "void acquisitions()"
uint8_t landing_light1= 0 ;
uint8_t landing_light2= 0 ;
float roulis;
float tangage;
float altitude_GPS_float;
int32_t altitude_GPS; // accepte les valeurs négatives (par exemple si QNH mal réglé avant décollage)
int32_t hauteur_AAL; // (Above Aerodrome Level)
#define ASL 0
#define AAL 1
uint8_t mode_affi_hauteur = ASL;
int32_t gnd_elv; // feet ; // [hauteur de la surface du terrain]/mer situé sous l'avion
int32_t alti_agl; // feet ; hauteur de l'avion par rapport au terrain (pas la piste, le relief !) situé au dessous de lui
int32_t vitesse; // kts
int32_t memo_vitesse;
int16_t target_speed = 180 ; // consigne de vitesse pour l'autopilot
int16_t dV;
int16_t acceleration;
int16_t vspeed; // vitesse verticale
float cap; // en degrés d'angle; direction actuelle du nez de l'avion
int16_t hdg1 = 150 ; // en degrés d'angle; consigne cap = Heading (HDG) Bug // PROBLEME: imprécision de 1° -> trop imprécis !!!
int16_t memo_hdg1;
uint8_t flag_refresh_hdg= 0 ;
uint8_t flag_traiter_SW= 0 ;
uint8_t flag_traiter_MCDU= 0 ;
float lat_avion; // WGS84
float lon_avion; // WGS84
float px_par_km;
float px_par_NM;
// Les points ptAA et ptBB sont les points d'insertion en finale, situés à 15NM de chaque côté dans l'axe de la piste
// Leurs coordonnées sont calculées en fonction de celles de la piste
// ( voir "liste_bali[n].dst_pt_AB" dans le fichier FG_data.h )
float lat_ptA;
float lon_ptA;
float lat_ptB;
float lon_ptB;
float lon_ptAA;
float lat_ptAA;
float lon_ptBB;
float lat_ptBB;
float lon_pti;
float lat_pti;
float GPS_distance_piste; // en NM
float memo_GPS_distance_piste; // servira à savoir si on se rapproche du centre de la piste ou si on s'en éloigne après
// l'avoir dépassé (lors du décollage)
float GPS_distance_ptAA; // point situé à 10 ou 15 NM dans l'axe de la piste pour amorcer l'approche
float GPS_distance_ptBB; // point situé à 10 ou 15 NM dans l'axe de la piste, dans l'autre sens
float GPS_distance_pti; // point quelconque
float erreur_axe= 0 ;
#define sens_AB 0
#define sens_BA 1
uint8_t sens_app_effectif; // effectif pour l'attero (ne concerne pas le décollage)
float lat_centre_pst;
float lon_centre_pst;
float longueur_piste;
float orient_pisteAB;
float orient_pisteBA;
float GPS_azimut_piste;
float GPS_azimut_ptA;
float GPS_azimut_ptB;
float GPS_azimut_ptAA;
float GPS_azimut_ptBB;
float GPS_azimut_pti;
char extremite_pst = 'X' ; // le bout le plus éloigné lors de l'approche, = 'A' ou 'B' sert aussi au décollage (au roulage)
// ce paramètre est calculé en fonction de la position réelle de l'avion lors de la prise de décision
uint8_t choix_aleatoire;
int16_t asel1 = 30 ; // consigne altitude ('niveau de vol' en centaines de pieds) 30 -> 3000ft (ASL)
float climb_rate= 0 ; // taux de montée (négatif pour descendre - sert pour attérissage automatique)
float joystick1; // valeur reçue de Flightgear par la liaison USB (lue dans le properties tree de FG)
float trim_elevator;
float elevator; // valeur à envoyer à FG, qui fixera la position de la gouverne de profondeur (val <0 pour monter)
float throttle;
bool reverser1= 0 ;
bool reverser2= 0 ;
int8_t flaps= 0 ; // 0..4
float speedbrake= 0 ; // 0 = rentré, 1 = sorti
bool gear_down= 1 ;
float brake_left;
float brake_right;
float ailerons= 0 ;
float rudder= 0 ;
float rudder_manuel; // fonction directe du potentiomètre
uint8_t view_number= 0 ;
String locks_type; // "ALT" ou "VS"
String AP_status; // "" ou "AP" permet d'engager ou de désengager l'autopilot de FlightGear
bool speed_ctrl;
int16_t num_bali= 0 ;
int16_t memo_num_bali= 0 ;
uint8_t flag_SDcardOk= 0 ;
uint32_t data_ok= 0 ; // ce n'est pas un flag
//uint8_t gs_ok=0;
uint8_t QNH_ok= 0 ;
uint8_t flag_1er_passage = 1 ;
uint8_t flag_att_cnx_usb= 1 ;
uint8_t attente_data= 1 ;
uint8_t inc_num_pt1_autorisee= 1 ;
int16_t loc= 0 ; // localizer
int16_t memo_loc= 0 ;
float memo_R2;
int16_t memo_y0;
uint16_t memo_x_avion= 0 ; // pour fonction "affi_approche()"
uint16_t memo_y_avion= 0 ;
const int bouton1 = 36 ; // attention: le GPIO 36 n'a pas de R de pullup interne, il faut en câbler une (10k) au +3V3
bool bouton1_etat;
bool memo_bouton1_etat;
const int bouton2 = 39 ; // attention: le GPIO 39 n'a pas de R de pullup interne, il faut en câbler une (10k) au +3V3
bool bouton2_etat;
bool memo_bouton2_etat;
String switches; // boutons connectés au 3eme ESP32 (SW), reçus par WiFi
uint16_t v_switches= 0 ;
uint16_t memo_v_switches= 0 ;
String switches_ND; // boutons connectés au 2eme ESP32 (ND), reçus par WiFi
uint16_t v_switches_ND= 0 ;
uint16_t memo_v_switches_ND= 0 ;
String bt_MCDU; // boutons connectés au 4eme ESP32 (MCDU), reçus par WiFi
uint16_t v_bt_MCDU= 0 ;
uint16_t memo_v_bt_MCDU= 0 ;
uint8_t options_route= 0 ;
uint8_t num_pti= 1 ;
String potar1;
int16_t v_potar1= 0 ; // peut être négatif -127..+127
float f_potar1= 0 ;
// deux encodeurs rotatifs pas à pas
const int rot1a = 32 ; // GPIO32 -> câbler une R au +3V3
const int rot1b = 33 ; // GPIO33 -> câbler une R au +3V3
const int rot2a = 35 ; // GPIO35 -> câbler une R au +3V3
const int rot2b = 34 ; // GPIO34 -> câbler une R au +3V3
//const int led1 = 25; // GPIO15
#define TEMPO 5 // tempo anti-rebond pour l'acquisition des encodeurs rotatifs
volatile uint32_t timer1 = 0 ;
volatile uint32_t timer2 = 0 ;
uint16_t compteur1;
int16_t tempo_message; // peut être négatif
uint8_t heures= 0 ;
uint8_t minutes= 0 ;
uint8_t secondes= 0 ;
float v_test1= - 1.0 ;
String WARNING;
String memo_WARNING;
void RAZ_variables( )
{
roulis= 0 ;
tangage= 0 ;
altitude_GPS= 0 ;
gnd_elv= 0 ;
vitesse= 0 ;
vspeed= 0 ;
cap= 0 ;
memo_hdg1= 0 ;
loc= 0 ;
memo_loc= 0 ;
}
/** ***********************************************************************************
IMAGE.bmp
***************************************************************************************/
/**
Rappel et décryptage de la fonction Color_To_565 : (elle se trouve dans le fichier LCDWIKI_KBV.cpp)
//Pass 8-bit (each) R,G,B, get back 16-bit packed color
uint16_t Color_To_565(uint8_t r, uint8_t g, uint8_t b)
{
return ((r & 0xF8) << 8) | ((g & 0xFC) << 3) | ((b & 0xF8) >> 3);
}
0xF8 = 11111000
0xFC = 11111100
(r & 0xF8) -> 5 bit de gauche de r (on ignore donc les 3 bits de poids faible)
(g & 0xFC) -> 6 bit de gauche de g (on ignore donc les 2 bits de poids faible)
(b & 0xF8) -> 5 bit de gauche de b (on ignore donc les 3 bits de poids faible)
rrrrr---
gggggg--
bbbbb---
après les décallages on obtient les 16 bits suivants:
rrrrr---========
gggggg--===
===bbbbb
soit après le ou :
rrrrrggggggbbbbb
calcul de la Fonction inverse :
RGB565_to_888
**/
void RGB565_to_888( uint16_t color565, uint8_t * R, uint8_t * G, uint8_t * B)
{
* R= ( color565 & 0xFFFFF800 ) >> 8 ;
* G= ( color565 & 0x7E0 ) >> 3 ;
* B= ( color565 & 0x1F ) << 3 ;
}
/** -----------------------------------------------------------------------------------
CAPTURE D'ECRAN vers SDcard
/** ----------------------------------------------------------------------------------- */
void write_TFT_on_SDcard( ) // enregistre le fichier .bmp
{
//TFT480.setTextColor(VERT, NOIR);
//TFT480.drawString("CP", 450, 300);
if ( flag_SDcardOk== 0 ) { return ; }
String s1;
uint16_t ys= 200 ;
TFT480.setFreeFont ( FF1) ;
TFT480.setTextColor ( JAUNE, NOIR) ;
uint16_t x, y;
uint16_t color565;
uint16_t bmp_color;
uint8_t R, G, B;
if ( ! SD.exists ( "/bmp/capture2.bmp" ) )
{
TFT480.fillRect ( 0 , 0 , 480 , 320 , NOIR) ; // efface
TFT480.setTextColor ( ROUGE, NOIR) ;
TFT480.drawString ( "NO /bmp/capture2.bmp !" , 100 , ys) ;
delay( 300 ) ;
TFT480.fillRect ( 100 , ys, 220 , 20 , NOIR) ; // efface
return ;
}
File File1 = SD.open ( "/bmp/capture2.bmp" , FILE_WRITE) ; // ouverture du fichier binaire (vierge) en écriture
if ( File1)
{
/*
Les images en couleurs réelles BMP888 utilisent 24 bits par pixel:
Il faut 3 octets pour coder chaque pixel, en respectant l'ordre de l'alternance bleu, vert et rouge.
*/
uint16_t bmp_offset = 138 ;
File1.seek ( bmp_offset) ;
TFT480.setTextColor ( VERT, NOIR) ;;
for ( y= 320 ; y> 0 ; y-- )
{
for ( x= 0 ; x< 480 ; x++ )
{
color565= TFT480.readPixel ( x, y) ;
RGB565_to_888( color565, & R, & G, & B) ;
File1.write ( B) ; //G
File1.write ( G) ; //R
File1.write ( R) ; //B
}
s1= ( String) ( y/ 10 ) ;
TFT480.fillRect ( 450 , 300 , 20 , 20 , NOIR) ;
TFT480.drawString ( s1, 450 , 300 ) ; // affi compte à rebour
}
File1.close ( ) ; // referme le fichier
TFT480.fillRect ( 450 , 300 , 20 , 20 , NOIR) ; // efface le compte à rebour
}
}
/** ----------------------------------------------------------------------------------- */
void Draw_arc_elliptique( uint16_t x0, uint16_t y0, int16_t dx, int16_t dy, float alpha1, float alpha2, uint16_t couleur)
// alpha1 et alpha2 en radians
{
/*
REMARQUES :
-cette fonction permet également de dessiner un arc de cercle (si dx=dy), voire le cercle complet
- dx et dy sont du type int (et pas uint) et peuvent êtres négafifs, ou nuls.
-alpha1 et alpha2 sont les angles (en radians) des caps des extrémités de l'arc
*/
uint16_t n;
float i;
float x,y;
i= alpha1;
while ( i< alpha2)
{
x= x0+ dx* cos ( i) ;
y= y0+ dy* cos ( i+ M_PI/ 2.0 ) ;
TFT480.drawPixel ( x,y, couleur) ;
i+= 0.01 ; // radians
}
}
void affi_rayon1( uint16_t x0, uint16_t y0, uint16_t rayon, double angle, float pourcent, uint16_t couleur_i, bool gras)
{
// trace une portion de rayon de cercle depuis 100%...à pourcent du rayon du cercle
// angle en radians - sens trigo
float x1, x2;
float y1, y2;
x1= x0+ rayon* cos ( angle) ;
y1= y0- rayon* sin ( angle) ;
x2= x0+ pourcent* rayon* cos ( angle) ;
y2= y0- pourcent* rayon* sin ( angle) ;
TFT480.drawLine ( x1, y1, x2, y2, couleur_i) ;
if ( gras)
{
TFT480.drawLine ( x1, y1- 1 , x2, y2- 1 , couleur_i) ;
TFT480.drawLine ( x1, y1+ 1 , x2, y2+ 1 , couleur_i) ;
}
}
void affi_rayon2( uint16_t x0, uint16_t y0, float r1, float r2, float angle_i, uint16_t couleur_i, bool gras)
{
// trace une portion de rayon de cercle entre les distances r1 et r2 du centre
// angle_i en degrés décimaux - sens trigo
float angle = angle_i/ 57.3 ; // (57.3 ~ 180/pi)
int16_t x1, x2;
int16_t y1, y2;
x1= x0+ int16_t ( r1* cos ( angle) ) ;
y1= y0- int16_t ( r1* sin ( angle) ) ;
x2= x0+ int16_t ( r2* cos ( angle) ) ;
y2= y0- int16_t ( r2* sin ( angle) ) ;
if ( ( x1> 0 ) && ( x2> 0 ) && ( y1> 0 ) && ( y2> 0 ) && ( x1< 480 ) && ( x2< 480 ) && ( y1< 320 ) && ( y2< 320 ) )
{
TFT480.drawLine ( x1, y1, x2, y2, couleur_i) ;
if ( gras)
{
TFT480.drawLine ( x1, y1- 1 , x2, y2- 1 , couleur_i) ;
TFT480.drawLine ( x1, y1+ 1 , x2, y2+ 1 , couleur_i) ;
}
}
//TFT480.fillCircle(x2, y2, 2, ROUGE);
}
void affi_tiret_H( uint16_t x0, uint16_t y0, uint16_t r, double angle_i, uint16_t couleur_i)
{
// trace un tiret perpendiculaire à un rayon de cercle de rayon r
// angle_i en degrés décimaux
float angle = angle_i/ 57.3 ; // (57.3 ~ 180/pi)
float x1, x2;
float y1, y2;
x1= x0+ ( r) * cos ( angle- 1 ) ;
y1= y0- ( r) * sin ( angle- 1 ) ;
x2= x0+ ( r) * cos ( angle+ 1 ) ;
y2= y0- ( r) * sin ( angle+ 1 ) ;
TFT480.drawLine ( x1, y1, x2, y2, couleur_i) ;
}
void affi_pointe( uint16_t x0, uint16_t y0, uint16_t r, double angle_i, float taille, uint16_t couleur_i)
{
// trace une pointe de flèche sur un cercle de rayon r
// angle_i en degrés décimaux - sens trigo
float angle = angle_i/ 57.3 ; // (57.3 ~ 180/pi)
int16_t x1, x2, x3;
int16_t y1, y2, y3;
x1= x0+ r* cos ( angle) ; // pointe
y1= y0- r* sin ( angle) ; // pointe
x2= x0+ ( r- 7 ) * cos ( angle- taille) ; // base A
y2= y0- ( r- 7 ) * sin ( angle- taille) ; // base A
x3= x0+ ( r- 7 ) * cos ( angle+ taille) ; // base B
y3= y0- ( r- 7 ) * sin ( angle+ taille) ; // base B
TFT480.fillTriangle ( x1, y1, x2, y2, x3, y3, couleur_i) ;
}
void affi_rectangle_incline( uint16_t x0, uint16_t y0, uint16_t r, double angle_i, uint16_t couleur_i)
{
//rectangle inscrit dans le cerce de rayon r
// angle_i en degrés décimaux - sens trigo
float angle = angle_i/ 57.3 ; // (57.3 ~ 180/pi)
int16_t x1, x2, x3, x4;
int16_t y1, y2, y3, y4;
float d_alpha= 0.08 ; // détermine la largeur du rectangle
// point 1
x1= x0+ r* cos ( angle- d_alpha) ;
y1= y0+ r* sin ( angle- d_alpha) ;
// point 2
x2= x0+ r* cos ( angle+ d_alpha) ;
y2= y0+ r* sin ( angle+ d_alpha) ;
// point 3
x3= x0+ r* cos ( M_PI + angle- d_alpha) ;
y3= y0+ r* sin ( M_PI + angle- d_alpha) ;
// point 4
x4= x0+ r* cos ( M_PI + angle+ d_alpha) ;
y4= y0+ r* sin ( M_PI + angle+ d_alpha) ;
TFT480.drawLine ( x1, y1, x2, y2, couleur_i) ;
TFT480.drawLine ( x2, y2, x3, y3, couleur_i) ;
TFT480.drawLine ( x3, y3, x4, y4, couleur_i) ;
TFT480.drawLine ( x4, y4, x1, y1, couleur_i) ;
}
float degTOrad( float angle)
{
return ( angle * M_PI / 180.0 ) ;
}
void init_affi_HA( )
{
TFT480.fillRect ( HA_x0- HA_w, HA_y0- HA_h- 1 , 2 * HA_w, HA_h+ 1 , HA_CIEL) ;
TFT480.fillRect ( HA_x0- HA_w, HA_y0- HA_h + HA_h, 2 * HA_w, HA_h, HA_SOL) ;
}
void dessine_avion( ) // sous forme d'équerres horizontales noires entourées de blanc
{
// aile gauche
TFT480.fillRect ( HA_x0- 102 , HA_y0- 3 , 60 , 10 , BLANC) ; //H contour en blanc
TFT480.fillRect ( HA_x0- 42 , HA_y0- 3 , 10 , 19 , BLANC) ; //V
TFT480.fillRect ( HA_x0- 100 , HA_y0- 1 , 60 , 5 , NOIR) ; //H
TFT480.fillRect ( HA_x0- 40 , HA_y0- 1 , 5 , 15 , NOIR) ; //V
// aile droite
TFT480.fillRect ( HA_x0+ 28 , HA_y0- 3 , 64 , 10 , BLANC) ; //H contour en blanc
TFT480.fillRect ( HA_x0+ 28 , HA_y0- 3 , 10 , 19 , BLANC) ; //V
TFT480.fillRect ( HA_x0+ 30 , HA_y0- 1 , 60 , 5 , NOIR) ; //H
TFT480.fillRect ( HA_x0+ 30 , HA_y0- 1 , 5 , 15 , NOIR) ; //V
//carré blanc au centre
TFT480.fillRect ( HA_x0- 4 , HA_y0- 3 , 8 , 2 , BLANC) ;
TFT480.fillRect ( HA_x0- 4 , HA_y0- 3 , 2 , 8 , BLANC) ;
TFT480.fillRect ( HA_x0- 4 , HA_y0+ 3 , 10 , 2 , BLANC) ;
TFT480.fillRect ( HA_x0+ 4 , HA_y0- 3 , 2 , 8 , BLANC) ;
//affi_dst_NAV();
}
void affiche_chrono( )
{
uint16_t x0= 240 ;
uint16_t y0= 0 ;
TFT480.setFreeFont ( FM9) ;
TFT480.setTextColor ( JAUNE) ;
String s1;
////if(heures<10){s1+="0";}
////s1+=String(heures);
////s1+=":";
if ( minutes< 10 ) { s1+= "0" ; }
s1+= String( minutes) ;
s1+= ":" ;
if ( secondes< 10 ) { s1+= "0" ; }
s1+= String( secondes) ;
TFT480.fillRect ( x0, y0, 55 , 15 , BLEU) ; //efface
TFT480.drawString ( s1, x0, y0) ;
}
void inc_chrono( )
{
secondes++;
if ( secondes> 59 )
{
secondes= 0 ;
minutes++;
if ( minutes> 59 )
{
minutes= 0 ;
heures++;
if ( heures> 23 )
heures= 0 ;
}
}
}
void RAZ_chrono( )
{
heures= 0 ;
minutes= 0 ;
secondes= 0 ;
}
void lign_sep( uint16_t Ax, uint16_t Ay, uint16_t Bx, uint16_t By)
{
// actualise la ligne de séparation ciel-sol
TFT480.drawLine ( Ax, Ay- 1 , Bx, By- 1 , HA_CIEL) ;
TFT480.drawLine ( Ax, Ay, Bx, By, BLANC) ;
TFT480.drawLine ( Ax, Ay+ 1 , Bx, By+ 1 , HA_SOL) ;
}
void arrondissement_coins( )
{
// fillTriangle(int32_t x1,int32_t y1, int32_t x2,int32_t y2, int32_t x3,int32_t y3, uint32_t color);
//HG
TFT480.fillTriangle (
HA_x0- HA_w, HA_y0- HA_h- 1 ,
HA_x0- HA_w, HA_y0- HA_h+ 20 ,
HA_x0- HA_w+ 20 , HA_y0- HA_h- 1 ,
NOIR) ;
//----------------------------------------------
//HD
TFT480.fillTriangle (
HA_x0+ HA_w, HA_y0- HA_h- 1 ,
HA_x0+ HA_w, HA_y0- HA_h+ 20 ,
HA_x0+ HA_w- 20 , HA_y0- HA_h- 1 ,
NOIR) ;
//----------------------------------------------
//BG
TFT480.fillTriangle (
HA_x0- HA_w, HA_y0+ HA_h+ 1 ,
HA_x0- HA_w, HA_y0+ HA_h- 20 ,
HA_x0- HA_w+ 20 , HA_y0+ HA_h+ 1 ,
NOIR) ;
//----------------------------------------------
//BD
TFT480.fillTriangle (
HA_x0+ HA_w, HA_y0+ HA_h+ 1 ,
HA_x0+ HA_w, HA_y0+ HA_h- 20 ,
HA_x0+ HA_w- 20 , HA_y0+ HA_h+ 1 ,
NOIR) ;
}
void affi_HA( ) // Horizon Artificiel
{
String s1;
////String s1=(String) roulis;
////TFT480.drawString(s1, 400, 20);
// pivot
int16_t x0= 0 ;
int16_t y0= 0 ;
//points d'intersection avec le bord du carré
int16_t Ax, Ay; // sur le bord gauche
int16_t Bx, By; // sur le bord droit
// Le dessin consistera à tracer des segments colorés entre les points A et B
// roulis -> [-90..+90]
// normalisation de la valeur R2 -> toujours >0
float R2 = - 1 * roulis;
if ( R2< 0 ) { R2+= 360 ; } // ce qui est un angle identique, de valeur positive (sens trigo)
// le pivot reste centré horizontalement mais se déplace verticalement en fonction du tangage
y0 += 2 * tangage;
//calcul & memorisation de ces deux facteurs, ce qui évitera 2 calculs de tangente à chaque passage dan la fonction
float tgt_moins = tan ( degTOrad( 90 - R2) ) ;
float tgt_plus = tan ( degTOrad( 90 + R2) ) ;
//-----------------------------------------------------------------------------
// CALCUL COTE DROIT (point B)
// calcul du point B d'intersection
Bx= HA_w;
By= y0 + HA_w* tan ( degTOrad( R2) ) ;
//test si le point d'intersection se trouve plus haut que le haut du carré :
if ( By> HA_h)
{
By= HA_h;
Bx = x0 + ( HA_h- y0) * tgt_moins;
}
if ( By< - HA_h)
{
By= - HA_h;
Bx = x0 + ( HA_h+ y0) * tgt_plus;
}
//-----------------------------------------------------------------------------
// CALCUL COTE GAUCHE (point A)
Ax= - HA_w;
Ay= y0 - HA_w* tan ( degTOrad( R2) ) ;
if ( Ay> HA_h)
{
Ay= HA_h;
Ax = x0 + ( HA_h- y0) * tgt_moins;
}
if ( Ay< - HA_h)
{
Ay= - HA_h;
Ax = x0 + ( HA_h+ y0) * tgt_plus;
}
//-----------------------------------------------------------------------------
// positionnement de l'ensemble sur l'écran
Ax += HA_x0;
Ay += HA_y0;
Bx += HA_x0;
By += HA_y0;
// pour éviter un tracé hors cadre au premier passage :
if ( flag_1er_passage == 1 )
{
Ax_actu = Ax;
Ay_actu = Ay;
Bx_actu = Bx;
By_actu = By;
flag_1er_passage= 0 ;
}
//-----------------------------------------------------------------------------
// ligne "verticale" d'inclinaison (tangage)
affi_rayon2( HA_x0, HA_y0, 85 , - memo_y0, 90 - memo_R2, HA_CIEL, false ) ; // efface partie supérieure
affi_rayon2( HA_x0, HA_y0, 85 , - y0, 90 - R2, BLANC, false ) ; // retrace ligne partie supérieure
affi_rayon2( HA_x0, HA_y0, - 85 ,- memo_y0, 90 - memo_R2, HA_SOL, false ) ; // efface partie inférieure
affi_rayon2( HA_x0, HA_y0, - 85 ,- y0, 90 - R2, VERT, false ) ; // retrace ligne partie inférieure
affi_pointe( HA_x0, HA_y0, 85 , 90 - memo_R2, 0.1 , HA_CIEL) ; // efface
affi_pointe( HA_x0, HA_y0, 85 , 90 - R2, 0.1 , BLANC) ; // retrace
//-----------------------------------------------------------------------------
// graduation fixe
TFT480.setFreeFont ( FF1) ;
TFT480.setTextColor ( BLANC, GRIS_AF) ;
TFT480.drawString ( "30" , HA_x0- 70 , HA_y0- 98 ) ;
TFT480.drawString ( "60" , HA_x0- 120 , HA_y0- 55 ) ;
TFT480.drawString ( "30" , HA_x0+ 60 , HA_y0- 98 ) ;
TFT480.drawString ( "60" , HA_x0+ 100 , HA_y0- 55 ) ;
//-----------------------------------------------------------------------------
// animation de la ligne de séparation horizontale
while ( ( Bx_actu ! = Bx) || ( By_actu ! = By) || ( Ax_actu ! = Ax) || ( Ay_actu ! = Ay) )
{
// déplacements successifs de 1 pixel de chaque extrémités de la ligne
//TFT480.drawLine(Bx, By, x2, y2, BLANC);
if ( Bx_actu < Bx) { Bx_actu++; lign_sep( Ax_actu, Ay_actu, Bx_actu, By_actu) ; }
if ( Bx_actu > Bx) { Bx_actu-- ; lign_sep( Ax_actu, Ay_actu, Bx_actu, By_actu) ; }
if ( Ax_actu < Ax) { Ax_actu++; lign_sep( Ax_actu, Ay_actu, Bx_actu, By_actu) ; }
if ( Ax_actu > Ax) { Ax_actu-- ; lign_sep( Ax_actu, Ay_actu, Bx_actu, By_actu) ; }
if ( By_actu < By) { By_actu++; lign_sep( Ax_actu, Ay_actu, Bx_actu, By_actu) ; }
if ( By_actu > By) { By_actu-- ; lign_sep( Ax_actu, Ay_actu, Bx_actu, By_actu) ; }
if ( Ay_actu < Ay) { Ay_actu++; lign_sep( Ax_actu, Ay_actu, Bx_actu, By_actu) ; }
if ( Ay_actu > Ay) { Ay_actu-- ; lign_sep( Ax_actu, Ay_actu, Bx_actu, By_actu) ; }
}
// graduation roulis qui se déplace angulairement avec la ligne de tangage
for ( int8_t n= 0 ; n< 4 ; n++ )
{
Draw_arc_elliptique( HA_x0, HA_y0, 20 * n, 20 * n, degTOrad( 80 - memo_R2+ n) , degTOrad( 100 - memo_R2- n) , HA_CIEL) ; // efface bas
Draw_arc_elliptique( HA_x0, HA_y0, 20 * n, 20 * n, degTOrad( 80 - R2+ n) , degTOrad( 100 - R2- n) , BLANC) ; // trace bas
Draw_arc_elliptique( HA_x0, HA_y0, 20 * n, 20 * n, degTOrad( 260 - memo_R2+ n) , degTOrad( 280 - memo_R2- n) , HA_SOL) ; // efface haut
Draw_arc_elliptique( HA_x0, HA_y0, 20 * n, 20 * n, degTOrad( 260 - R2+ n) , degTOrad( 280 - R2- n) , BLANC) ; // trace haut
}
memo_R2 = R2;
memo_y0 = y0;
//-----------------------------------------------------------------------------
arrondissement_coins( ) ;
if ( read_bit( flags, bit_autoland) == 0 )
{
affi_distance_piste( ) ;
}
}
void affi_acceleration( )
{
// POUR TEST **********
////String s2= (String) acceleration;
////TFT480.fillRect(100, 50, 200, 20, TFT_BLACK);
////TFT480.setFreeFont(FF5);
////TFT480.setTextColor(BLANC, NOIR);
////TFT480.drawString("Acceleration=", 100, 50);
////TFT480.drawString(s2, 250, 50);
// ********************
//barres verticales colorées juste à droite de la vitesse indiquant sa variation
uint16_t x0= 60 ;
uint16_t Y_zero= 162 ;
int16_t dy= 0 ;
//"fleche" haute
TFT480.fillRect ( x0, 40 , 8 , Y_zero, GRIS_TRES_FONCE) ; // efface haut
if ( acceleration > 1 )
{
dy= acceleration;
TFT480.fillRect ( x0, Y_zero- dy, 8 , dy, VERT) ; // fleche
}
//"fleche" basse
TFT480.fillRect ( x0, Y_zero, 8 , 150 , GRIS_TRES_FONCE) ; // efface bas
if ( acceleration < - 1 )
{
dy= - acceleration;
TFT480.fillRect ( x0, Y_zero, 8 , dy, JAUNE) ; // fleche
}
TFT480.fillRect ( x0, Y_zero, 10 , 2 , BLANC) ; // tiret horizontal blanc
TFT480.fillRect ( x0, 310 , 8 , 20 , NOIR) ;
}
void bride( int16_t * valeur)
{
int16_t y_min = 40 ;
int16_t y_max = 310 ;
if ( * valeur< y_min) { * valeur= y_min; }
if ( * valeur> y_max) { * valeur= y_max; }
}
void affi_switches( ) // en haut à droite
{
TFT480.setTextFont ( 1 ) ;
TFT480.setTextColor ( GRIS) ;
TFT480.fillRect ( 430 , 0 , 25 , 10 , NOIR) ; // efface le nombre précédemment affiché
TFT480.drawString ( switches, 430 , 0 ) ;
TFT480.fillRect ( 430 , 10 , 25 , 10 , NOIR) ; // efface le nombre précédemment affiché
TFT480.drawString ( switches_ND, 430 , 10 ) ;
}
void affi_elevator( )
{
bargraph_V_float( elevator, 340 , 130 , JAUNE) ;
}
void affi_rudder( )
{
TFT480.setTextFont ( 1 ) ;
TFT480.fillRect ( 430 , 20 , 25 , 8 , NOIR) ; // efface le nombre précédemment affiché
TFT480.setTextColor ( ORANGE) ;
TFT480.drawString ( potar1, 430 , 20 ) ; // nombre orange en haut à droite
float v1 = rudder;
bargraph_H_float( v1, 210 , 235 , JAUNE) ; // barre horizontale sous l'horizon artificiel
}
void affi_flags( ) // nombre jaune en haut à droite
{
TFT480.fillRect ( 430 , 30 , 25 , 8 , NOIR) ; // efface le nombre précédemment affiché
TFT480.setTextFont ( 1 ) ;
TFT480.setTextColor ( JAUNE) ;
String s1 = String( flags) ;
TFT480.drawString ( s1, 430 , 30 ) ;
}
void affi_etats_bt_MCDU( ) // nombre vert en haut à droite
{
TFT480.fillRect ( 430 , 40 , 25 , 8 , NOIR) ; // efface le nombre précédemment affiché
TFT480.setTextFont ( 1 ) ;
TFT480.setTextColor ( VERT) ;
String s1 = String( v_bt_MCDU) ;
TFT480.drawString ( s1, 430 , 38 ) ;
}
void affi_extremite( ) // en haut à droite
{
TFT480.fillRect ( 430 , 50 , 25 , 6 , NOIR) ; // efface le nombre précédemment affiché
TFT480.setTextFont ( 1 ) ;
TFT480.setTextColor ( BLEU_CLAIR) ;
String s1 = String( extremite_pst) ; // 'A' ou 'B' (la plus éloignée de l'avion)
TFT480.drawString ( s1, 430 , 45 ) ;
}
void affi_sens_APP( ) // en haut à droite
{
TFT480.fillRect ( 445 , 50 , 35 , 6 , NOIR) ; // efface le nombre précédemment affiché
TFT480.setTextFont ( 1 ) ;
TFT480.setTextColor ( VERT) ;
String s1;
if ( sens_app_effectif == sens_AB) { s1 = "A->B" ; } else { s1 = "B->A" ; }
TFT480.drawString ( s1, 445 , 48 ) ;
}
void affi_vitesse( )
{
uint16_t x1;
String s1;
int16_t y_min = 40 ;
int16_t y_max = 300 ;
TFT480.setTextColor ( BLANC) ; // Background is not defined so it is transparent
//---------------------------------------------------------------------------------------
//bande verticale multicolore
#define vitesse_sol 40
int16_t vitesse_mini1 = 90 ;
int16_t vitesse_mini2 = 130 ;
int16_t vitesse_maxi1 = 200 ;
int16_t vitesse_maxi2 = 280 ;
//calcul de la position des limites entre les différentes couleurs verticales
int16_t d1, d2, d3, d4, d5;
d1= ( int16_t ) ( 100 + 3.2 * ( ( vitesse - vitesse_sol) ) ) ;
d2= ( int16_t ) ( 100 + 3.2 * ( ( vitesse - vitesse_mini1) ) ) ;
d3= ( int16_t ) ( 100 + 3.2 * ( ( vitesse - vitesse_mini2) ) ) ;
d4= ( int16_t ) ( 100 + 3.2 * ( ( vitesse - vitesse_maxi1) ) ) ;
d5= ( int16_t ) ( 100 + 3.2 * ( ( vitesse - vitesse_maxi2) ) ) ;
bride( & d1) ;
bride( & d2) ;
bride( & d3) ;
bride( & d4) ;
bride( & d5) ;
int16_t h1, h2, h3, h4, h5;
h1 = y_max- ( int16_t ) d1;
h2 = d1- d2;
h3 = d2- d3;
h4 = d3- d4;
h5 = d4- d5;
TFT480.fillRect ( 50 , 40 , 6 , ( int16_t ) d5, ORANGE) ;
TFT480.fillRect ( 50 , d5, 6 , h5, JAUNE) ;
TFT480.fillRect ( 50 , d4, 6 , h4, VERT) ;
TFT480.fillRect ( 50 , d3, 6 , h3, ORANGE) ;
TFT480.fillRect ( 50 , d2, 6 , h2, ROUGE) ;
TFT480.fillRect ( 50 , d1, 6 , 300 - ( int16_t ) d1, GRIS) ;
TFT480.fillRect ( 50 , 300 , 6 , 20 , NOIR) ;
//---------------------------------------------------------------------------------------
//échelle verticale graduée glissante
uint16_t y0;
int16_t vit1;
float d6;
TFT480.setFreeFont ( FF1) ;
y0= 3.2 * ( vitesse% 10 ) ;
TFT480.fillRect ( 0 , y_min, 50 , y_max- 30 , GRIS_AF) ; // bande verticale à gauche
for ( int n= 0 ; n< 10 ; n++ )
{
d6 = 2 + y0+ 32.0 * n; // 24 pixels verticalement entre chaque trait -> 10*24 = 240px (hauteur de l'affiur)
{
if ( ( d6> y_min) && ( d6< y_max- 10 ) && ( vit1>= 0 ) && ( vit1< 1000 ) )
{
TFT480.fillRect ( 45 , ( int16_t ) d6, 10 , 2 , BLANC) ; // petits tirets horizontaux
}
vit1 = vitesse - 10 * ( n- 5 ) ;
vit1 /= 10 ;
vit1 *= 10 ;
s1= ( String) vit1;
if ( ( d6> y_min) && ( d6< y_max- 10 ) && ( vit1>= 0 ) && ( vit1< 1000 ) )
{
TFT480.setTextColor ( BLANC, GRIS_AF) ;
//TFT480.drawString(" ", 9, d6);
x1= 0 ;
if ( vit1< 100 ) { x1= 7 ; } // pour affichage centré
if ( vit1< 10 ) { x1= 14 ; }
if ( vit1>= 10 )
{
TFT480.drawString ( s1, x1, ( uint16_t ) d6- 5 ) ; // Graduation (tous les 20kts)
}
}
}
}
TFT480.fillRect ( 0 , 38 , 68 , 2 , NOIR) ; // efface ; BLEU pour test
//---------------------------------------------------------------------------------------
// affichage de la valeur principale
uint16_t VP_y0 = 150 ;
TFT480.setTextColor ( BLANC, NOIR) ;
TFT480.setFreeFont ( FF18) ;
s1= ( String) vitesse;
TFT480.fillRect ( 3 , VP_y0, 42 , 26 , NOIR) ; //efface le nombre précédemment affiché (pour le cas où on passe de 3 à 2 chiffres)
if ( ( vitesse>= 0 ) && ( vitesse < 1000 ) )
{
x1= 3 ;
if ( vitesse< 100 ) { x1= 10 ; } // pour affichage centré
if ( vitesse< 10 ) { x1= 20 ; }
TFT480.drawString ( s1, x1, VP_y0+ 3 ) ; // affi le nombre
} // affi en gros à mi-hauteur de l'écran
else
{ TFT480.fillRect ( 3 , VP_y0, 42 , 26 , GRIS) ; }
TFT480.drawRoundRect ( 1 , VP_y0- 1 , 45 , 28 , 5 , BLANC) ; // encadrement de la valeur centrale affichée
TFT480.fillTriangle ( 45 , VP_y0+ 7 , 45 , VP_y0+ 17 , 55 , VP_y0+ 12 , NOIR) ; // petit triangle (curseur) noir
}
void affi_asel( int32_t asel_i)
{
// consigne ALTITUDE de l'autopilot (en rose en haut à droite)
uint16_t x1 = 360 ;
TFT480.setFreeFont ( FF5) ;
if ( asel_i >= 0 )
{
// ( chiffres en roses en haut à droite)
String s2 = ( String) ( asel_i) ;
TFT480.setTextColor ( ROSE, NOIR) ;
TFT480.fillRect ( x1, 0 , 77 , 20 , NOIR) ; // efface
if ( asel_i< 10000 ) { x1+= 7 ; }
if ( asel_i< 1000 ) { x1+= 7 ; } // pour affichage centré
if ( asel_i< 100 ) { x1+= 7 ; }
if ( asel_i< 10 ) { x1+= 7 ; }
TFT480.drawString ( s2, x1, 5 ) ;
}
}
void affi_alti_agl( )
{
// consigne ALTITUDE de l'autopilot (couleur du texte = HA_SOL, en bas à droite)
uint16_t x1 = 360 ;
TFT480.setFreeFont ( FF5) ;
if ( alti_agl >= 0 )
{
// ( chiffres en roses en haut à droite)
String s2 = ( String) ( alti_agl) ;
TFT480.setTextColor ( HA_SOL, NOIR) ;
TFT480.fillRect ( x1, 300 , 77 , 20 , NOIR) ; // efface
if ( alti_agl< 10000 ) { x1+= 7 ; }
if ( alti_agl< 1000 ) { x1+= 7 ; } // pour affichage centré
if ( alti_agl< 100 ) { x1+= 7 ; }
if ( alti_agl< 10 ) { x1+= 7 ; }
TFT480.drawString ( s2, x1, 303 ) ;
TFT480.setTextFont ( 1 ) ;
TFT480.setTextColor ( BLANC, NOIR) ;
TFT480.drawString ( "hauteur/gnd:" , 290 , 307 ) ;
TFT480.drawRoundRect ( 287 , 302 , 136 , 17 , 3 , GRIS_FONCE) ; // encadrement de la valeur affichée
}
}
void affi_target_speed( )
{
// consigne de vitesse de l'autopilot
// ( chiffres en rose en haut à gauche )
String s2 = ( String) ( target_speed) ;
TFT480.setTextColor ( ROSE, NOIR) ;
TFT480.setFreeFont ( FF5) ;
uint8_t x1= 7 ;
TFT480.fillRect ( x1, 20 , 60 , 15 , NOIR) ; // efface
TFT480.drawString ( s2, x1, 20 ) ;
}
void affi_vt_verticale( )
{
// affichage analogique sur la droite de l'écran
uint16_t x0= 435 ;
uint16_t y0= 165 ;
float y1;
uint16_t x1;
String s1;
TFT480.fillRect ( x0, y0- 90 , 45 , 180 , GRIS_AF) ; // barre grise
TFT480.fillRect ( x0, y0, 25 , 2 , BLEU_CLAIR) ; // centre
// ------------------------
// graduations sur un arc vertical
TFT480.setFreeFont ( FF1) ;
TFT480.setTextColor ( BLANC, NOIR) ;
TFT480.drawString ( "ft/mn" , x0- 8 , y0+ 125 ) ;
TFT480.setTextColor ( BLANC, GRIS_AF) ;
float angle;
for ( uint8_t n= 0 ; n< 7 ; n++ )
{
angle = 135 + n* 15 ; // 1 tiret tous les 15 degrés
affi_rayon1( HA_x0+ 340 , y0, 110 , degTOrad( angle) , 0.9 , BLANC, false ) ; // tirets de graduation
}
TFT480.drawString ( "3" , x0+ 9 , y0- 90 ) ;
TFT480.drawString ( "2" , x0- 3 , y0- 65 ) ;
TFT480.drawString ( "1" , x0- 8 , y0- 35 ) ;
TFT480.drawString ( "0" , x0- 3 , y0- 5 + 0 ) ;
TFT480.drawString ( "1" , x0- 8 , y0+ 25 ) ;
TFT480.drawString ( "2" , x0- 3 , y0+ 50 ) ;
TFT480.drawString ( "3" , x0+ 9 , y0+ 75 ) ;
// ------------------------
// aiguille à droite de l'écran
float angle2;
TFT480.setFreeFont ( FF1) ;
s1= ( String) ( vspeed* 60 ) ;
angle2 = 180.0 - vspeed * 0.92 ;
TFT480.fillRect ( x0- 10 , y0- 110 , 55 , 15 , GRIS_TRES_FONCE) ; // efface haut
TFT480.fillRect ( x0- 10 , y0+ 105 , 55 , 15 , GRIS_TRES_FONCE) ; // efface bas
if ( ( vspeed > - 50 ) && ( vspeed < 50 ) )
{
affi_rayon1( HA_x0+ 330 , y0, 100 , degTOrad( angle2) , 0.7 , JAUNE, true ) ;
TFT480.setTextColor ( JAUNE, NOIR) ;
}
else if ( vspeed > 50 )
{
affi_rayon1( HA_x0+ 330 , y0, 110 , degTOrad( 132 ) , 0.7 , JAUNE, true ) ;
TFT480.setTextColor ( JAUNE, NOIR) ;
TFT480.drawString ( s1, x0- 10 , y0- 110 ) ;
}
else if ( vspeed < - 50 )
{
affi_rayon1( HA_x0+ 330 , y0, 110 , degTOrad( 228 ) , 0.7 , JAUNE, true ) ;
TFT480.setTextColor ( JAUNE, NOIR) ;
TFT480.drawString ( s1, x0- 10 , y0+ 105 ) ;
}
// affichage digital de la valeur
/*
// = vitesse ascensionnelle, sous forme de barres verticales vertes, à droite, près de l'echelle d'altitude
uint16_t x0=405;
uint16_t y0=40;
int16_t dy=0;
//fleche haute
TFT480.fillRect(x0, 0, 10, 140, GRIS_FONCE); // efface haut
if (vspeed > 1)
{
dy= vspeed;
TFT480.fillRect(x0, y0+100-dy, 10, dy, VERT); // fleche
}
//fleche basse
TFT480.fillRect(x0, y0+150, 10, 135, GRIS_FONCE); // efface bas
if (vspeed < -1)
{
dy= -vspeed;
TFT480.fillRect(x0, y0+150, 10, dy, VERT); // fleche
}
*/
}
void affi_cap( )
{
// cercle tournant de CAP gradué en bas au centre de l'écran
// Les lettres 'N' 'S' 'E' 'O' pour Nord Sud Est Ouset sont initialisées sous forme de sprites dans la fonction setup()
uint16_t x02 = 200 ;
uint16_t y02 = 350 ;
float angle; // en radians
//float cap_RD; // en radians (le cap fourni par FG étant en degrés d'angle)
uint16_t x_spr;
uint16_t y_spr;
uint16_t x_hdg;
uint16_t y_hdg;
uint8_t R = 70 ;
uint8_t R2 = R- 6 ;
/**
360° =2 pi rad
1° = 2 pi/360 rad = pi/180 rad
**/
TFT480.fillCircle ( x02,y02, R, GRIS_AF) ;
for ( uint8_t n= 0 ; n< 24 ; n++ )
{
angle = ( int16_t ) cap+ 15 + n* 15 ; // 1 tiret tous les 15 degrés
affi_rayon1( x02, y02, ( R- 5 ) , degTOrad( angle) , 0.9 , BLANC, false ) ; // tirets de graduation
}
x_hdg = x02 + R2* cos ( degTOrad( hdg1- 90 - cap) ) ;
y_hdg = y02 + R2* sin ( degTOrad( hdg1- 90 - cap) ) ;
TFT480.drawLine ( x02, y02, x_hdg, y_hdg, VERT) ;
TFT480.drawCircle ( x_hdg, y_hdg, 5 , VERT) ; // rond vert sur le cercle = consigne de cap de l'autopilot
x_spr = x02+ R2 * cos ( degTOrad( angle) ) ;
y_spr = y02- R2 * sin ( degTOrad( angle) ) ;
TFT480.setPivot ( x_spr, y_spr) ;
SPR_E.pushRotated ( - cap+ 90 , TFT_BLACK) ; // Plot rotated Sprite, black = transparent
x_spr = x02+ R2* cos ( degTOrad( angle+ 90 ) ) ;
y_spr = y02- R2 * sin ( degTOrad( angle+ 90 ) ) ;
TFT480.setPivot ( x_spr, y_spr) ;
SPR_N.pushRotated ( - cap, TFT_BLACK) ;
x_spr = x02+ R2 * cos ( degTOrad( angle+ 180 ) ) ;
y_spr = y02- R2 * sin ( degTOrad( angle+ 180 ) ) ;
TFT480.setPivot ( x_spr, y_spr) ;
SPR_O.pushRotated ( - cap- 90 , TFT_BLACK) ;
x_spr = x02+ R2 * cos ( degTOrad( angle- 90 ) ) ;
y_spr = y02- R2 * sin ( degTOrad( angle- 90 ) ) ;
TFT480.setPivot ( x_spr, y_spr) ;
SPR_S.pushRotated ( - cap, TFT_BLACK) ;
// petite "maison" dans le cercle (valeur du cap)
#define a 170 // x général
#define b a+30
#define c b+30
#define d 288 // y général
#define e d+10
#define f e+20
TFT480.drawLine ( a, f, c, f, BLANC) ; // sol
TFT480.drawLine ( a, f, a, e, BLANC) ; // mur de gauche
TFT480.drawLine ( c, f, c, e, BLANC) ; // mur de droite
TFT480.drawLine ( a, e, b, d, BLANC) ; // toit pente gauche
TFT480.drawLine ( c, e, b, d, BLANC) ; // toit pente droite
// affi la valeur
String s1;
uint16_t x0 = a+ 1 ;
uint16_t y0 = e;
uint16_t x1= x0;
if ( cap< 100 ) { x1+= 5 ; } // pour affichage centré
if ( cap< 10 ) { x1+= 5 ; }
s1= String ( cap, 1 ) ;
TFT480.fillRect ( x0, y0, 57 , 20 , NOIR) ; // efface le nombre précédemment affiché
TFT480.setTextColor ( BLANC, NOIR) ;
TFT480.setFreeFont ( FM9) ;
TFT480.drawString ( s1, x1, y0) ;
}
void affi_hauteur_RWY( )
{
/**
Pour exprimer une hauteur au dessus de l'aérodrome, on défini la hauteur AAL (Above Aerodrome Level). Il
s'agit de la hauteur entre l'avion et le point de référence de l'aérodrome comme s'il était en dessous de la
position de l'appareil (même s'il n'y est pas). Cette hauteur ne suit pas le relief.
On la calculera ici en retranchant [l'altitude de l'aéroport sélectionné] à [l'altitude GPS].
En conséquense, il faut impérativement penser à sélectionner dans le module SD le bon aérodrome, celui d'où l'on décolle,
puis en cas de voyage, celui où l'on va se poser (ce qui renseignera son altitude) sinon l'affichage sera faux.
par exemple si l'on choisit "Montpellier" en étant à Clermont-Ferrand, l'erreur sera de 1089 ft
Les altitudes des aérodromes sont enregistées dans le fichier FG_data.h
*/
String s1;
uint16_t x0 = 365 ;
//---------------------------------------------------------------------------------------
//échelle verticale graduée glissante
uint16_t x1;
uint16_t y0;
uint16_t hauteur;
int16_t alt1;
float d5;
if ( mode_affi_hauteur == AAL) { hauteur = hauteur_AAL; }
if ( mode_affi_hauteur == ASL) { hauteur = altitude_GPS; }
TFT480.setFreeFont ( FF1) ;
y0= 3.2 * ( hauteur_AAL% 10 ) ;
TFT480.fillRect ( x0, 20 , 60 , 280 , GRIS_AF) ; //efface bande verticale à droite
for ( int n= 0 ; n< 9 ; n++ )
{
d5 = 0 + y0+ 32.0 * n; // pixels verticalement entre chaque trait -> 10*24 = 240px (hauteur de l'affi)
{
if ( d5>= 20 ) // marge en haut
{
TFT480.fillRect ( x0, ( int16_t ) d5+ 5 , 5 , 2 , BLANC) ; // petits tirets horizontaux
alt1 = hauteur - 10 * ( n- 5 ) ;
alt1 /= 10 ;
alt1 *= 10 ;
s1= ( String) alt1;
if ( alt1>= 0 )
{
TFT480.setTextColor ( BLANC, GRIS_AF) ;
//TFT480.drawString(" ", 9, d5);
x1= x0;
if ( alt1< 10000 ) { x1+= 7 ; } // pour affichage centré
if ( alt1< 1000 ) { x1+= 7 ; }
if ( alt1< 100 ) { x1+= 7 ; }
if ( alt1< 10 ) { x1+= 7 ; }
TFT480.drawString ( s1, x1, ( uint16_t ) d5) ; // Graduation (tous les 20kts)
}
}
}
}
//---------------------------------------------------------------------------------------
// affichage de la valeur principale
uint16_t x2;
uint16_t y0b = 155 ;
TFT480.fillRect ( x0- 20 , y0b, 80 , 25 , NOIR) ; // efface le nombre précédemment affiché
TFT480.setTextColor ( BLANC, NOIR) ;
TFT480.setFreeFont ( FF18) ;
if ( ( 1 ) && ( hauteur < 60000 ) )
{
s1= ( String) hauteur;
}
else { s1= "----" ; }
x2= x0- 20 ;
if ( hauteur< 10000 ) { x2+= 10 ; } // pour affichage centré
if ( hauteur< 1000 ) { x2+= 10 ; }
if ( hauteur< 100 ) { x2+= 10 ; }
if ( hauteur< 10 ) { x2+= 10 ; }
if ( hauteur< 0 )
{
TFT480.setTextColor ( ROUGE) ;
x2= x0- 20 ; // si valeur négative affichée avec signe "-"
}
TFT480.drawString ( s1, x2, y0b) ;
uint16_t couleur1= GRIS;
if ( mode_affi_hauteur == ASL) { couleur1= BLEU; }
if ( mode_affi_hauteur == AAL) { couleur1= VERT; }
TFT480.drawRoundRect ( x0- 20 , y0b- 3 , 75 , 28 , 5 , couleur1) ; // encadrement de la valeur centrale affichée
}
void affi_distance_piste( )
{
String s1;
uint16_t x0= 190 ;
uint16_t y0= 255 ;
float nav_nm;
// rappel: 1 mile marin (NM nautical mile) = 1852m
//ils_nm = (float)ils_dst / 1852.0;
//if (ils_nm >99) {ils_nm=0;}
TFT480.drawRect ( x0- 47 , y0- 15 , 190 , 35 , GRIS_FONCE) ; //encadrement
TFT480.setTextFont ( 1 ) ;
TFT480.setTextColor ( BLANC, NOIR) ;
TFT480.drawString ( "distance" , x0, y0- 12 ) ;
TFT480.setFreeFont ( FM9) ;
TFT480.setTextColor ( JAUNE, NOIR) ;
TFT480.drawString ( "RWY" , x0- 45 , y0- 12 ) ;
TFT480.setTextColor ( BLANC, NOIR) ;
int nb_decimales;
if ( GPS_distance_piste> 99 ) { nb_decimales = 0 ; } else { nb_decimales = 1 ; }
s1 = String( GPS_distance_piste, nb_decimales) ;
if ( data_ok == 0 ) { s1= " --" ; }
TFT480.fillRect ( x0, y0, 52 , 18 , NOIR) ; // efface
TFT480.setFreeFont ( FM9) ;
TFT480.drawString ( s1, x0, y0) ;
TFT480.drawRoundRect ( x0, y0- 2 , 50 , 18 , 5 , GRIS_FONCE) ; // encadrement de la valeur affichée
//affi_float_test(GPS_distance_piste_new, 100, 3, VERT, NOIR);
TFT480.setTextColor ( JAUNE, NOIR) ;
TFT480.drawString ( "NM" , x0+ 55 , y0) ;
//affi_direction_piste // direction de la piste vue de l'avion
TFT480.setTextFont ( 1 ) ;
TFT480.setTextColor ( BLANC, NOIR) ;
TFT480.drawString ( "direction" , x0+ 80 , y0- 12 ) ;
TFT480.setTextColor ( BLANC, NOIR) ;
s1 = String( GPS_azimut_piste, 0 ) ; // 0 -> 0 décimales
if ( data_ok == 0 ) { s1= " --" ; }
TFT480.fillRect ( x0+ 90 , y0, 52 , 18 , NOIR) ; // efface
TFT480.setFreeFont ( FM9) ;
TFT480.drawString ( s1, x0+ 90 , y0) ;
TFT480.drawRoundRect ( x0+ 90 , y0- 2 , 40 , 18 , 5 , GRIS_FONCE) ; // encadrement de la valeur affichée
TFT480.drawCircle ( x0+ 135 , y0, 2 , JAUNE) ; // caractère 'degré'
}
void affi_distance_ptAA( )
{
String s1;
uint16_t x0= 260 ;
uint16_t y0= 280 ;
TFT480.setTextFont ( 1 ) ;
TFT480.setTextColor ( BLANC, NOIR) ;
TFT480.drawString ( "to ptA" , x0, y0) ;
int nb_decimales = 1 ;
if ( GPS_distance_ptAA>= 100 ) { nb_decimales= 0 ; }
s1 = String( GPS_distance_ptAA, nb_decimales) ;
TFT480.fillRect ( x0, y0+ 10 , 45 , 12 , NOIR) ; // efface
TFT480.setFreeFont ( FM9) ;
TFT480.setTextColor ( VERT, NOIR) ;
TFT480.drawString ( s1, x0, y0+ 10 ) ;
TFT480.drawRoundRect ( x0- 2 , y0+ 8 , 52 , 18 , 5 , GRIS_FONCE) ;
TFT480.setTextColor ( JAUNE, NOIR) ;
TFT480.drawString ( "NM" , x0+ 55 , y0+ 10 ) ;
}
void affi_distance_ptBB( )
{
String s1;
uint16_t x0= 260 ;
uint16_t y0= 280 ;
TFT480.setTextFont ( 1 ) ;
TFT480.setTextColor ( BLANC, NOIR) ;
TFT480.drawString ( "to ptB" , x0, y0) ;
int nb_decimales = 1 ;
if ( GPS_distance_ptBB>= 100 ) { nb_decimales= 0 ; }
s1 = String( GPS_distance_ptBB, nb_decimales) ;
TFT480.fillRect ( x0, y0+ 10 , 45 , 12 , NOIR) ; // efface
TFT480.setFreeFont ( FM9) ;
TFT480.setTextColor ( VERT, NOIR) ;
TFT480.drawString ( s1, x0, y0+ 10 ) ;
TFT480.drawRoundRect ( x0- 2 , y0+ 8 , 52 , 18 , 5 , GRIS_FONCE) ;
TFT480.setTextColor ( JAUNE, NOIR) ;
TFT480.drawString ( "NM" , x0+ 55 , y0+ 10 ) ;
}
void affi_distance_pti( )
{
String s1;
uint16_t x0= 260 ;
uint16_t y0= 280 ;
TFT480.setTextFont ( 1 ) ;
TFT480.setTextColor ( BLANC, NOIR) ;
s1 = "to Pt " ;
s1 += String( num_pti) ;
TFT480.drawString ( s1, x0, y0) ;
int nb_decimales = 1 ;
if ( GPS_distance_pti< 100 ) { nb_decimales= 0 ; }
s1 = String( GPS_distance_pti, nb_decimales) ;
TFT480.fillRect ( x0, y0+ 10 , 45 , 12 , NOIR) ; // efface
TFT480.setFreeFont ( FM9) ;
TFT480.setTextColor ( VERT, NOIR) ;
TFT480.drawString ( s1, x0, y0+ 10 ) ;
TFT480.drawRoundRect ( x0- 2 , y0+ 8 , 52 , 18 , 5 , GRIS_FONCE) ;
TFT480.setTextColor ( JAUNE, NOIR) ;
TFT480.drawString ( "NM" , x0+ 55 , y0+ 10 ) ;
}
void affi_f_potar1( )
{
uint16_t x0= 145 ;
uint16_t y0= 160 ;
TFT480.fillRect ( x0, y0, 130 , 30 , GRIS_TRES_FONCE) ;
TFT480.drawRect ( x0, y0, 130 , 30 , ROUGE) ;
TFT480.setFreeFont ( FMB9) ;
TFT480.setTextColor ( BLANC) ;
String s1= "potar=" + String( f_potar1) ;
TFT480.drawString ( s1, x0+ 5 , y0+ 6 ) ;
}
void affi_hauteur_SOL( int16_t H) // de l'avion / sol en dessous de lui ; dans la partie basse du PFD (dans le 'marron')
{
WARNING = String( H) + " ft/gnd" ;
tempo_message= 5 ;
//affi_message(WARNING, BLANC, GRIS_TRES_FONCE);
}
void efface_hauteur_SOL( )
{
uint16_t x0= 145 ;
uint16_t y0= 188 ;
TFT480.fillRect ( x0, y0, 130 , 30 , HA_SOL) ;
}
void efface_cadre_bas( uint16_t couleur)
{
TFT480.fillRect ( 70 , 232 , 292 , 84 , NOIR) ;
TFT480.drawRect ( 70 , 232 , 292 , 84 , GRIS_FONCE) ;
efface_sprite_trajectoire( ) ;
}
void efface_message( uint16_t back_couleur)
{
int x= 145 ;
int y= 210 ;
int dx= 145 ;
TFT480.fillRect ( x, y, dx, 18 , back_couleur) ; //efface le précédent
}
void affi_message( String s, uint16_t txt_couleur, uint16_t back_couleur)
{
int x= 145 ;
int y= 210 ;
if ( WARNING ! = memo_WARNING)
{
memo_WARNING = WARNING; // pour ne pas répéter le même message
TFT480.setFreeFont ( FMB9) ;
TFT480.setTextColor ( txt_couleur, back_couleur) ;
TFT480.drawString ( s, x, y) ;
}
}
void affi_Airport( )
{
uint16_t n;
float v1;
String s1;
TFT480.fillRect ( 255 , 280 , 108 , 20 , NOIR) ; // efface - BLEU pour test
TFT480.setTextFont ( 1 ) ;
TFT480.setTextColor ( BLEU_CLAIR, NOIR) ;
s1= liste_bali[ num_bali] .ID_OACI ;
TFT480.drawString ( s1, 255 , 280 ) ;
s1= ( String) liste_bali[ num_bali] .altitude ;
s1 += " ft" ;
TFT480.setTextColor ( VIOLET2, NOIR) ;
TFT480.drawString ( s1, 300 , 280 ) ;
TFT480.fillRect ( 270 , 300 , 60 , 30 , NOIR) ; // efface - GRIS pour test
s1= liste_bali[ num_bali] .nom ;
TFT480.setTextColor ( BLEU_CLAIR, NOIR) ;
TFT480.drawString ( s1, 255 , 290 ) ;
}
void affi_mode_affi_hauteur( )
{
if ( mode_affi_hauteur == AAL)
{
TFT480.setFreeFont ( FF1) ;
TFT480.setTextColor ( VERT, GRIS_AF) ; // Autolanding en cours, ok
TFT480.drawString ( "AAL" , 305 , 0 ) ;
}
if ( mode_affi_hauteur == ASL)
{
TFT480.setFreeFont ( FF1) ;
TFT480.setTextColor ( BLEU_CLAIR, GRIS_AF) ; // Autolanding en cours, ok
TFT480.drawString ( "ASL" , 305 , 0 ) ;
}
}
// ===== CALCULS ===============================================================================================================
void calcul_ptAA_ptBB( float dst) // situés à dst NM de la piste, dans l'axe. (dst = 10NM en principe, sauf cas particuliers)
{
calculs_piste( ) ;
float d_lat = lat_ptA - lat_ptB;
float d_lon = lon_ptA - lon_ptB;
lat_ptAA = lat_centre_pst + ( 1852 * dst / longueur_piste) * d_lat;
lon_ptAA = lon_centre_pst + ( 1852 * dst / longueur_piste) * d_lon;
//affi_float_test(lat_ptAA, 120, 2, VERT, NOIR);
//affi_float_test(lon_ptAA, 120, 3, JAUNE, NOIR);
lat_ptBB = lat_centre_pst - ( 1852 * dst / longueur_piste) * d_lat;
lon_ptBB = lon_centre_pst - ( 1852 * dst / longueur_piste) * d_lon;
//affi_float_test(lat_ptBB, 120, 4, VERT, NOIR);
//affi_float_test(lon_ptBB, 120, 5, JAUNE, NOIR);
}
void calculs_piste( ) // lors du choix de l'Airport
{
lat_ptA = liste_bali[ num_bali] .lat_A ;
lon_ptA = liste_bali[ num_bali] .lon_A ;
lat_ptB = liste_bali[ num_bali] .lat_B ;
lon_ptB = liste_bali[ num_bali] .lon_B ;
//affi_float_test(lat_ptB, 120, 4, VERT, NOIR);
//affi_float_test(lon_ptB, 120, 5, JAUNE, NOIR);
longueur_piste = 1000.0 * distance_AB( lat_ptA, lon_ptA, lat_ptB, lon_ptB) ; // en m
orient_pisteAB = azimut_AB( lat_ptA, lon_ptA, lat_ptB, lon_ptB) ;
//orient_pisteAB = 94.43; // fixé pour TEST (piste Béziers-Vias)
//affi_float_test(orient_pisteAB, 120, 2, JAUNE, GRIS_TRES_FONCE); // pour TEST
orient_pisteBA = orient_pisteAB + 180.0 ;
if ( orient_pisteBA > 360.0 ) { orient_pisteBA - = 360.0 ; }
lat_centre_pst= ( lat_ptA + lat_ptB) / 2.0 ;
lon_centre_pst= ( lon_ptA + lon_ptB) / 2.0 ;
}
void calculs_GPS( ) // temps réel
{
// calculs de la position de l'avion / piste (distance et direction)
// DISTANCE (variable globale)
// voir la fonction "distance_AB()" dans le fichier "Fonctions1.h"
GPS_distance_piste = distance_AB( lat_avion, lon_avion, lat_centre_pst, lon_centre_pst) / 1.852 ; // du centre de la piste, en NM
GPS_distance_ptAA = distance_AB( lat_avion, lon_avion, lat_ptAA, lon_ptAA) / 1.852 ;
GPS_distance_ptBB = distance_AB( lat_avion, lon_avion, lat_ptBB, lon_ptBB) / 1.852 ;
GPS_distance_pti = distance_AB( lat_avion, lon_avion, lat_pti, lon_pti) / 1.852 ;
// DIRECTION (variable globale)
GPS_azimut_piste = azimut_AB( lat_avion, lon_avion, lat_centre_pst, lon_centre_pst) ; // latitudes et longitudes en degrés décimaux
GPS_azimut_ptA = azimut_AB( lat_avion, lon_avion, lat_ptA, lon_ptA) ;
GPS_azimut_ptB = azimut_AB( lat_avion, lon_avion, lat_ptB, lon_ptB) ;
GPS_azimut_ptAA = azimut_AB( lat_avion, lon_avion, lat_ptAA, lon_ptAA) ;
GPS_azimut_ptBB = azimut_AB( lat_avion, lon_avion, lat_ptBB, lon_ptBB) ;
GPS_azimut_pti = azimut_AB( lat_avion, lon_avion, lat_pti, lon_pti) ;
}
void calcul_pti( float azimut_i, float distance_i, float * latitude, float * longitude)
{
/*
calcul des coordonnées GPS d'un point quelquonque PROCHE de la piste (en vue de faire des "hyppodromes" biens maitrisés)
données:
-azimut et distance du point concerné par rapport au, et vu du, centre de la piste (paramètres: azimut_i et distance_i)
-coordonnées GPS des points extrémités de la piste (lus dans le fichier FG_data.h)
-coordonnées GPS du centre, et l'orientation de la piste (voir fonction "void calculs_GPS()" )
on va alors ajouter la valeur de l'azimut_i à l'orientation de la piste pour faire le calcul
*/
// calcul de l'orientation (relevé) du point (azimut par rapport au nord)
float orientation_point = - 1.0 * orient_pisteAB + azimut_i; //azimut_i étant l'angle entre la piste et la direction du point
// 1 minute d'angle sur un méridien => 1 NM de latitude
// 60mn d'angle (1deg) => 60 NM
// 1 NM => 1/60 de degré -> 0.0166 degrés
* latitude = lat_centre_pst + ( distance_i / 60.0 * sin ( raddeg * ( orientation_point - 90.0 ) ) ) ;
// pour la longitude, il faut tenir compte que la longueur d'un parallèle dépend de la latitude
// (max à l'équateur, nulle au pôle) suivant une loi en cos.
* longitude= lon_centre_pst + ( distance_i / ( 60.0 * cos ( raddeg * lat_centre_pst) ) * cos ( raddeg * ( orientation_point - 90.0 ) ) ) ;
}
void find_sens_approche( ) // en fonction de la position réelle de l'avion
{
//détermination du sens de l'approche pour l'autoland (en vol)
////float delta_1 = orient_pisteBA - GPS_azimut_piste;
////if (delta_1<0) {delta_1+=360.0;}
////if (delta_1>360) {delta_1-=360.0;}
////if ((delta_1 >90.0) && (delta_1 <270.0)) {sens_app_effectif = sens_AB;} else {sens_app_effectif = sens_BA;}
find_END_RWY_dst( ) ;
if ( extremite_pst== 'A' ) { sens_app_effectif = sens_BA; }
if ( extremite_pst== 'B' ) { sens_app_effectif = sens_AB; }
}
void find_END_RWY_dst( ) //le pt le plus ELOIGNE en face de nous, en bout de piste (= A ou B )
{
// calcul basé sur les distances
// en vue de guider (en lacet) l'avion au roulage lors de l'atterrissage
// on visera le point le plus éloigné
// attention: lors d'un touch and go, si l'avion a dépassé le centre de la piste lors de la remise des gaz, le sens sera FAUX !
float lat_A= liste_bali[ num_bali] .lat_A ;
float lon_A= liste_bali[ num_bali] .lon_A ;
float lat_B= liste_bali[ num_bali] .lat_B ;
float lon_B= liste_bali[ num_bali] .lon_B ;
float dst_A = distance_AB( lat_avion, lon_avion, lat_A, lon_A) ;
float dst_B = distance_AB( lat_avion, lon_avion, lat_B, lon_B) ;
if ( ( dst_A) > ( dst_B) ) { extremite_pst= 'A' ; } else { extremite_pst= 'B' ; }
}
void find_END_RWY_angl( ) //le pt le plus ELOIGNE en face de nous, en bout de piste (= A ou B )
{
// calcul par les angles
// en vue de guider (en lacet) l'avion au roulage lors du décollage
// on visera le point le plus éloigné
float delta = cap - orient_pisteAB;
if ( delta < - 180 ) { delta += 360 ; }
if ( delta > 180 ) { delta - = 360 ; }
if ( abs ( delta) > 90 ) { extremite_pst= 'A' ; } else { extremite_pst= 'B' ; }
//affi_string_test((String)extremite_pst, 130, 4, BLANC, NOIR);
}
// =============================================================================================================================
void nav_to_centre_piste( )
{
voyant_APP.affiche ( BLANC, BLEU) ;
hdg1 = round( GPS_azimut_piste) ;
if ( GPS_distance_piste < 2 ) // on désengage tout, il faut un appui sur touche pour décider de la suite du vol
{
raz_bit( & flags, bit_nav_to_piste) ; // ce qui signe la fin des appel de cette fonction
raz_bit( & flags, bit_nav_to_ptAA) ;
raz_bit( & flags, bit_nav_to_ptBB) ;
raz_bit( & flags, bit_route) ;
raz_bit( & flags, bit_autoland) ;
raz_bit( & flags, bit_atterrissage) ;
//raz_bit(&flags, bit_au_sol);
raz_bit( & flags, bit_decollage) ;
/*
for (int n=0; n<4; n++)
{
TFT480.setFreeFont(FF6);
//affi_message("verticale RWY", 130, 200, 200, BLEU_CLAIR, HA_SOL, 1); // ici
}
*/
// rien de plus, on repasse en auto-pilotage manuel
set_bit( & flags, bit_FG_AP) ;
}
}
void nav_to_ptAA( ) // on passera en boucle dans cette fonction
{
poste_warning( "nav to AA" ) ;
// point situé à 12NM dans l'axe de la piste (d'un côté)
voyant_APP.affiche ( BLANC, VIOLET1) ;
// CAP
hdg1 = round( GPS_azimut_ptAA) ;
if ( ( GPS_distance_ptAA < 80 ) && ( asel1 > 100 ) ) { asel1 = 100 ; }
if ( ( GPS_distance_ptAA < 40 ) && ( asel1 > 60 ) ) { asel1 = 60 ; }
uint16_t asel_mini = liste_bali[ num_bali] .niveau_de_vol_mini ;
if ( ( GPS_distance_ptAA < 30 ) && ( asel1 < asel_mini) ) { asel1 ++; }
// force à garder une hauteur minimale de sécurité le cas échéant (relief...)
uint16_t asel_mini2 = ( gnd_elv + 1600 ) / 100 ;
if ( asel1 < asel_mini2) { asel1 = asel_mini2; } // remonte si trop bas / sol
affi_distance_ptAA( ) ;
if ( GPS_distance_ptAA < 3.0 )
{
raz_bit( & flags, bit_nav_to_piste) ;
raz_bit( & flags, bit_nav_to_ptAA) ; // ce qui signe la fin des appel de cette fonction
raz_bit( & flags, bit_nav_to_ptBB) ;
raz_bit( & flags, bit_route) ;
//efface_cadre_bas(NOIR);
if ( asel1 > 30 ) { asel1 = 30 ; }
TFT480.setFreeFont ( FF6) ;
poste_warning( "Finale" ) ;
efface_cadre_bas( NOIR) ;
find_END_RWY_dst( ) ; // la plus éloignée (= 'A' ou = 'B')
set_bit( & flags, bit_autoland) ; // on passe en finale
//set_bit(&flags, bit_rudder_attero);
}
// vitesse
if ( ( GPS_distance_piste < 30.0 ) && ( target_speed> 160 ) ) { target_speed = 160 ; }
}
void nav_to_ptBB( ) // on passera en boucle dans cette fonction
{
poste_warning( "nav to BB" ) ;
// point situé à 12NM dans l'axe de la piste (de l'autre côté)
voyant_APP.affiche ( BLANC, VIOLET2) ;
// CAP
hdg1 = round( GPS_azimut_ptBB) ;
if ( ( GPS_distance_ptBB < 80 ) && ( asel1 > 100 ) ) { asel1 = 100 ; }
if ( ( GPS_distance_ptBB < 40 ) && ( asel1 > 60 ) ) { asel1 = 60 ; }
uint16_t asel_mini = liste_bali[ num_bali] .niveau_de_vol_mini ;
if ( ( GPS_distance_ptBB < 30 ) && ( asel1 < asel_mini) ) { asel1++; }
// force à garder une hauteur minimale de sécurité le cas échéant (relief...)
uint16_t asel_mini2 = ( gnd_elv + 1600 ) / 100 ;
if ( asel1 < asel_mini2) { asel1 = asel_mini2; } // remonte si trop bas / sol
affi_distance_ptBB( ) ;
if ( GPS_distance_ptBB < 3.0 )
{
raz_bit( & flags, bit_nav_to_piste) ;
raz_bit( & flags, bit_nav_to_ptAA) ;
raz_bit( & flags, bit_nav_to_ptBB) ; // ce qui signe la fin des appel de cette fonction
raz_bit( & flags, bit_nav_to_pti) ;
raz_bit( & flags, bit_circling) ;
raz_bit( & flags, bit_route) ;
if ( asel1 > 30 ) { asel1 = 30 ; }
//TFT480.setFreeFont(FF6);
////affi_message("proche ptB", BLEU_CLAIR, HA_SOL, 1); // ici
poste_warning( "Finale" ) ;
efface_cadre_bas( NOIR) ;
find_END_RWY_dst( ) ; // la plus éloignée (= 'A' ou = 'B')
set_bit( & flags, bit_autoland) ; // on passe en finale
//set_bit(&flags, bit_rudder_attero);
}
// vitesse
if ( ( GPS_distance_piste < 30.0 ) && ( target_speed> 160 ) ) { target_speed = 160 ; }
}
void nav_to_pti( )
{
String s1;
// point quelconque
voyant_APP.affiche ( BLANC, VERT_FONCE) ;
// CAP
hdg1 = round( GPS_azimut_pti) ;
affi_distance_pti( ) ;
if ( GPS_distance_pti > 1.5 ) { inc_num_pt1_autorisee= 1 ; }
if ( GPS_distance_pti < 1.0 )
{
TFT480.setFreeFont ( FF6) ;
//s1 ="PT ";
s1 = "to PT " + String( num_pti) ;
poste_warning( s1) ;
if ( inc_num_pt1_autorisee== 1 )
{
num_pti ++; // pour naviguer vers le point suivant
if ( num_pti > 10 )
{
num_pti = 1 ;
}
asel1 = 30 ; //à priori. niveau de vol (en ft/100)
if ( num_pti== 1 ) { asel1 = 3 ; flaps= 3 ; } // 300ft -> 100m
if ( num_pti== 2 ) { asel1 = 15 ; flaps= 2 ; } // 1500ft -> 500m
if ( num_pti== 3 ) { asel1 = 30 ; flaps= 0 ; } // 3000ft -> 1000m
if ( num_pti== 4 ) { asel1 = 30 ; flaps= 0 ; }
if ( num_pti== 5 ) { asel1 = 30 ; flaps= 0 ; }
if ( num_pti== 6 ) { asel1 = 30 ; flaps= 0 ; }
if ( num_pti== 7 ) { asel1 = 30 ; flaps= 0 ; }
if ( num_pti== 8 ) { asel1 = 30 ; flaps= 0 ; }
if ( num_pti== 9 ) { asel1 = 20 ; flaps= 2 ; }
if ( num_pti== 10 ) { asel1 = 10 ; flaps= 3 ; }
inc_num_pt1_autorisee = 0 ; // pour éviter d'incrémenter plusieurs fois lorsqu'on est proche du point
}
}
}
void tour_de_piste( )
{
poste_warning( "tour de piste" ) ;
// cheminement entre points dont la position est définie par un vecteur partant du centre de la piste (angle & distance)
// num_pti est incrémenté dans la fonction 'nav_to_pti()' lorsque le point en cours est atteint
float dst;
float alpha;
uint8_t n2= 0 ;
if ( extremite_pst == 'A' ) { n2 = num_pti; }
if ( extremite_pst == 'B' ) { n2 = 11 - num_pti; } //même trajectoire parcourue en sens inverse
if ( n2 == 1 ) { alpha= 0 ; dst = 1.0 ; }
if ( n2 == 2 ) { alpha= 0 ; dst = 4.0 ; }
if ( n2 == 3 ) { alpha= 16 ; dst = 5.1 ; }
if ( n2 == 4 ) { alpha= 46 ; dst = 4.0 ; }
if ( n2 == 5 ) { alpha= 72.3 ; dst = 3.1 ; }
if ( n2 == 6 ) { alpha= 109 ; dst = 3.1 ; }
if ( n2 == 7 ) { alpha= 135 ; dst = 4.0 ; }
if ( n2 == 8 ) { alpha= 163 ; dst = 5.1 ; }
if ( n2 == 9 ) { alpha= 180 ; dst = 4.0 ; }
if ( n2 == 10 ) { alpha= 180 ; dst = 1.0 ; }
dst *= 1.5 ; // taille de la figure
if ( read_bit( flags, bit_sens_circling) == 1 ) { alpha = 360 - alpha; } // trajectoire miroir
calcul_pti( alpha, dst, & lat_pti, & lon_pti) ;
// variante :
//calcul_pti(30.0*num_pti, 10.0, &lat_pti, &lon_pti); // points disposés en cercle, à 10NM
}
void calcul_erreur_position( ) // pour savoir si l'avion se trouve exactement dans l'axe de la piste
{
float x, y;
float x1, x2;
float y1, y2;
float p;
float s;
//float erreur;
x= lon_avion;
y= lat_avion;
x1 = liste_bali[ num_bali] .lon_A ; x2 = liste_bali[ num_bali] .lon_B ;
y1 = liste_bali[ num_bali] .lat_A ; y2 = liste_bali[ num_bali] .lat_B ;
p = ( y2- y1) / ( x2- x1) ; // pente de la droite A-B
s= y1+ p * ( x- x1) ;
erreur_axe = y- s;
//affi_float_test(erreur_axe, 110, 2, BLANC, BLEU); // pour test
}
void desengage_autoland( )
{
poste_warning( "autoland OFF" ) ;
raz_bit( & flags, bit_autoland) ;
efface_cadre_bas( NOIR) ;
//init_affi_HA();
voyant_L.affiche ( BLANC, GRIS_FONCE) ;
voyant_G.affiche ( BLANC, GRIS_FONCE) ;
/*
target_speed =180;
locks_type = "ALT";
asel1 = 30; // consigne altitude 30 -> 3000ft
climb_rate=0; // taux de montée (négatif pour descendre - sert pour attérissage automatique)
hdg1 = cap;
RAZ_chrono();
*/
}
void affiche_etats_flags( ) // certains "voyants" en haut à gauche
{
if ( read_bit( flags, bit_rudder_decol) == 1 ) { voyant_RD.affiche ( NOIR, VERT) ; }
else if ( read_bit( flags, bit_rudder_attero) == 1 ) { voyant_RD.affiche ( NOIR, JAUNE) ; }
else { voyant_RD.affiche ( BLANC, GRIS_TRES_FONCE) ; }
if ( read_bit( flags, bit_nav_to_piste) == 1 ) { voyant_route.affiche ( BLANC, BLEU) ; }
else if ( read_bit( flags, bit_nav_to_ptAA) == 1 ) { voyant_route.affiche ( NOIR, JAUNE) ; }
else if ( read_bit( flags, bit_nav_to_ptBB) == 1 ) { voyant_route.affiche ( NOIR, JAUNE) ; }
else { voyant_route.affiche ( BLANC, GRIS_TRES_FONCE) ; }
if ( read_bit( flags, bit_atterrissage) == 1 ) { voyant_ATT.affiche ( NOIR, VERT) ; }
else { voyant_ATT.affiche ( BLANC, GRIS_TRES_FONCE) ; }
}
void affi_ligne1_V( uint16_t x)
{
/** DOC: (source : "TFT_eSPI.h")
// The next functions can be used as a pair to copy screen blocks (or horizontal/vertical lines) to another location
// Read a block of pixels to a data buffer, buffer is 16 bit and the size must be at least w * h
void readRect(int32_t x, int32_t y, int32_t w, int32_t h, uint16_t *data);
// Write a block of pixels to the screen which have been read by readRect()
void pushRect(int32_t x, int32_t y, int32_t w, int32_t h, uint16_t *data);
**/
TFT480.pushRect ( memo_x1, 0 , 1 , 320 , data_C1) ; // efface la ligne en replaçant l'image
memo_x1= x;
TFT480.readRect ( x, 0 , 1 , 320 , data_C1) ; // memorisation de la ligne avant de tracer dessus
//TFT480.drawFastVLine(x, 0, 320, ROUGE);
TFT480.drawFastVLine ( x, y_1, y_2- y_1, JAUNE) ;
}
void affi_ligne2_V( uint16_t x)
{
TFT480.pushRect ( memo_x2, 0 , 1 , 320 , data_C2) ; // efface la ligne en replaçant l'image
memo_x2= x;
TFT480.readRect ( x, 0 , 1 , 320 , data_C2) ; // memorisation de la ligne avant de tracer dessus
//TFT480.drawFastVLine(x, 0, 320, ROUGE);
TFT480.drawFastVLine ( x, y_1, y_2- y_1, JAUNE) ;
}
void affi_ligne1_H( uint16_t y)
{
TFT480.pushRect ( 0 , memo_y1, 480 , 1 , data_L1) ; // efface la ligne en replaçant l'image
memo_y1= y;
TFT480.readRect ( 0 , y, 480 , 1 , data_L1) ; // memorisation de la ligne avant de tracer dessus
//TFT480.drawFastHLine(0, y, 480, ROUGE);
TFT480.drawFastHLine ( x_1, y, x_2- x_1, JAUNE) ;
}
void affi_ligne2_H( uint16_t y)
{
TFT480.pushRect ( 0 , memo_y2, 480 , 1 , data_L2) ; // efface la ligne en replaçant l'image
memo_y2= y;
TFT480.readRect ( 0 , y, 480 , 1 , data_L2) ; // memorisation de la ligne avant de tracer dessus
//TFT480.drawFastHLine(0, y, 480, ROUGE);
TFT480.drawFastHLine ( x_1, y, x_2- x_1, JAUNE) ;
}
// =============================================================================================================================
void prepare_decollage( )
{
init_affi_HA( ) ;
raz_bit( & flags, bit_atterrissage) ;
raz_bit( & flags, bit_FG_AP) ;
raz_bit( & flags, bit_autoland) ;
raz_bit( & flags, bit_route) ;
//set_bit(&flags, bit_nav_to_piste); // par défaut
raz_bit( & flags, bit_nav_to_pti) ;
raz_bit( & flags, bit_nav_to_ptAA) ;
raz_bit( & flags, bit_nav_to_ptBB) ;
raz_bit( & flags, bit_roulage) ;
locks_type = "ALT" ;
asel1 = 60 ;
target_speed = 200 ;
find_END_RWY_angl( ) ;
set_bit( & flags, bit_au_sol) ;
set_bit( & flags, bit_rudder_decol) ;
hdg1 = cap;
RAZ_chrono( ) ;
set_bit( & flags, bit_decollage) ;
flaps = 3 ; // sortie des volets
poste_warning( "flaps 15" ) ;
//affi_message(WARNING, BLANC, GRIS_TRES_FONCE);
landing_light1= 1 ;
landing_light2= 1 ;
//WARNING= "decollage";
}
void auto_rudder_deco( float correction)
{
//WARNING="auto rudder";
// losrqu'on est bien positionné sur la piste, on doit voir l'extrémité de la piste, en face, au loin
// dans la même direction que l'orientation physique de la piste
float d_alpha;
float lat_i, lon_i;
affi_extremite( ) ; // l'extrémité concernée est déterminée par la fonction "find_END_RWY_angl()"
if ( extremite_pst == 'A' )
{
lat_i= liste_bali[ num_bali] .lat_A ;
lon_i= liste_bali[ num_bali] .lon_A ;
}
if ( extremite_pst == 'B' )
{
lat_i= liste_bali[ num_bali] .lat_B ;
lon_i= liste_bali[ num_bali] .lon_B ;
}
float az1 = azimut_AB( lat_avion, lon_avion, lat_i, lon_i) ; // direction dans laquelle on voit le bout de la piste au loin...
d_alpha = az1 - cap;
// le débattement doit augmenter fortement lorsque la roue avant ne touche plus le sol
// et que seule la dérive a une action (aérodynamique) (vers 110 kts)
float facteur1 = 0.03 ; // 0.1->zig-zag ; agit sur l'orientation de l'avion
float facteur2 = - 0.04 * vitesse; //-0.05 // agit sur la position de l'avion / axe de la piste
if ( vitesse < 110 ) { facteur2 = - 0.05 ; } // <110 ; -0.05// sinon se met à zig-zaguer grave tant que la roue avant touche le sol
//if (is_in(vitesse, 80, 175)) {facteur1 = 15;} // on augmente fortement l'amplitude de cette correction
rudder = ( d_alpha * facteur1) + ( correction * facteur2) ;
borne_in ( & rudder, - 0.2 , 0.2 ) ;
if ( vitesse < 20 ) { rudder = 0 ; }
if ( vitesse > 175 ) { rudder = 0 ; } // à voir !!!
}
void decollage( )
// on passera en boucle dans cette fonction ; voir aussi la fonction "prepare_decollage()"
{
asel1 = liste_bali[ num_bali] .niveau_de_vol_mini ;
speedbrake = 0 ;
reverser1 = 0 ;
reverser2 = 0 ;
throttle = - 0.95 ;
brake_left = 0 ;
brake_right = 0 ;
landing_light1= 1 ;
landing_light2= 1 ;
trim_elevator = - 0.3 ; // bonne valeur pour décoller
//if (hauteur_AAL >10){trim_elevator=-0.25;} // pour ne pas grimper aux arbres
//if (hauteur_AAL >15){trim_elevator=-0.2;}
// -------------------- AZIMUT -----------------------------------------------------------------
float op1;
float delta_AZM;
find_sens_approche( ) ;
affi_sens_APP( ) ; // en haut à droite
if ( sens_app_effectif == sens_AB)
{
op1 = orient_pisteAB;
delta_AZM = op1 - GPS_azimut_ptB;
}
if ( sens_app_effectif == sens_BA)
{
op1 = orient_pisteBA;
delta_AZM = op1 - GPS_azimut_ptA;
}
auto_rudder_deco( delta_AZM) ;
ailerons= - roulis/ 5.0 ; // 1.2 //asservissement des ailerons en fonction de l'angle de roulis (-> ailes à plat)
// ----------------------------------------------------------------------------------------------
if ( vitesse > 140 ) { trim_elevator= - 0.25 ; } // pour ne pas grimper aux arbres
if ( vitesse > 150 ) { trim_elevator= - 0.2 ; }
affi_elevator( ) ;
if ( vitesse > 120 )
{
poste_warning( " V1 " ) ;
}
if ( is_in( hauteur_AAL, 5 , 20 ) )
{
poste_warning( "flaps 15" ) ;
flaps = 3 ;
}
if ( is_in( hauteur_AAL, 20 , 40 ) )
{
poste_warning( "gear UP" ) ;
gear_down = 0 ;
}
if ( is_in( hauteur_AAL, 40 , 50 ) )
{
poste_warning( "flaps 10" ) ;
flaps = 2 ;
}
if ( is_in( hauteur_AAL, 50 , 70 ) )
{
poste_warning( "flaps 5" ) ;
flaps = 1 ;
}
if ( is_in( hauteur_AAL, 70 , 80 ) )
{
poste_warning( "flaps 0" ) ;
flaps = 0 ;
}
if ( hauteur_AAL >= 80 )
{
set_bit( & flags, bit_FG_AP) ; // engage Autopilot de FlightGear
poste_warning( "AP" ) ;
speed_ctrl= true ;
raz_bit( & flags, bit_rudder_decol) ;
//raz_bit(&flags, bit_au_sol);
rudder= 0 ;
gear_down = 0 ;
landing_light1= 0 ;
landing_light2= 0 ;
raz_bit( & flags, bit_decollage) ; // fin des appels de cette fonction
}
}
// =============================================================================================================================
void auto_rudder_attero( float correction) // on passera en boucle dans cette fonction
{
// losrqu'on est bien orienté sur la piste, on doit voir l'extrémité de la piste, en face, au loin
// dans la même direction que l'orientation physique de la piste
float d_alpha;
float lat_i, lon_i;
affi_extremite( ) ; // déterninée en une seule fois lors de la fin de la phase d'autoland
// voir dans la fonction "void auto_landing()"
// ne plus la re-déterminer par la suite parce qu'une fois dépassé le centre de la piste, le résultat serait faux !
if ( extremite_pst == 'A' )
{
lat_i= liste_bali[ num_bali] .lat_A ;
lon_i= liste_bali[ num_bali] .lon_A ;
}
if ( extremite_pst == 'B' )
{
lat_i= liste_bali[ num_bali] .lat_B ;
lon_i= liste_bali[ num_bali] .lon_B ;
}
float az1 = azimut_AB( lat_avion, lon_avion, lat_i, lon_i) ; // direction dans laquelle on voit le bout de la piste au loin...
d_alpha = az1 - cap; // orientation de l'avion vers le bout de la piste
borne_in ( & d_alpha, - 3.0 , 3.0 ) ; // -3 3
////if (is_in(vitesse, 100, 140)) {rudder = d_alpha / 20.0;}
////else if (is_in(vitesse, 80, 100)) {rudder = d_alpha / 25.0;} //30
////else if (is_in(vitesse, 50, 80)) {rudder = d_alpha / 30.0;} //40
////else if (is_in(vitesse, 20, 50)) {rudder = d_alpha / 50.0;} //80
float facteur1 = - 0.26 * vitesse + 65.2 ; // agit sur l'orientation de l'avion
float facteur2 = - 0.5 ; // agit sur la position de l'avion / axe de la piste
if ( vitesse < 80 ) { facteur2 = 0 ; } // sinon se met à zig-zaguer grave lorsque la roue avant touche le sol
// le débattement doit être important lorsque la roue avant ne touche pas le sol
// et que seule la dérive a une action (aérodynamique) (> 80 kts)
if ( is_in( vitesse, 80 , 175 ) ) { facteur1 = 15 ; } // on augmente fortement l'amplitude de cette correction
rudder = ( d_alpha / facteur1) + ( correction * facteur2) ;
if ( vitesse > 175 ) { rudder = 0 ; }
if ( vitesse < 10 ) { rudder = 0 ; }
//raz_bit(&flags, bit_rudder_attero); // afin de pouvoir manoeuvrer sur les taxiways
// OK, garde l'axe de la piste, heu... lorsque la roue avant touche le sol...
// lorsque seul le train principal touche et la vitesse est faible et donc la gouverne de direction peu efficace... pas top !
// on pourrait jouer en différentiel sur les freins gauche-droite, mais ça complique pas mal l'affaire !
// toutefois si on freine rapidement (dans la seconde qui suit le toucher initial) la roue avant touche à son tour, et c'est OK
}
void auto_landing( ) // approche et finale
{
// on passera en boucle dans cette fonction
/**
voir: https://en.wikipedia.org/wiki/Autoland
Approche automatique
CAPTURE l'avion et le POSE !
LES CONSEILS QUI SUIVENT ne concernent que l'utilisation du simulateur de vol FlightGear connecté aux ESP32
et le choix du Citation X comme avion.
c'est à dire qu'ils ne doivent en aucun cas servir pour le pilotage d'un avion réel.
-vitesse conseillée : 140kts, 160kts max
-distance conseillée : entre 20 et 10 nautiques
-avec une trajectoire qui recoupe l'axe de la piste, < 90°
(si capture à moins de 10 NM, la trajectoire sera difficilement corrigée -> remise des gaz ou crash au choix !)
-hauteur conseillée : 3000ft à 10NM (= niveau 30)
-volets sortis 2 puis 3
à priori pas d'AF si vitesse correcte
-sortir le train !
-allumer feux d'atterrissage
notes: l'autopilot se désengage automatiquement (par FlightGear) sous 100ft de hauteur
(réglable, voir la variable 'hauteur_mini_autopilot' au début de ce programme)
ce qui suit est actuellement devenu automatique dans les nouvelles versions :
(Donc garder le manche en main pour l'arrondi et le touché final, en surveillant
- la hauteur
- la vitesse
- le pitch
- position des volets
- éventuellement petit coup d'AF (aérofreins -> CTRL + B au clavier)
- si piste très courte, inverseurs de poussée (au sol) + gaz (touche 'suppr')
- toutefois si approche visiblement trop courte ou trop longue, pas d'attéro kamikaze ! -> remise des gaz !!
- si système visuel "papi" présent, le respecter !!
TOUTEFOIS :
- on peut obtenir un posé 100% auto en anticipant un cabrage de l'avion pour faire l'arrondi dans les règles de l'art
avec posé du train principal en premier, puis ensuite la roulette de nez. Pour cela :
- en fin de finale, à une hauteur de 100 feet, dès le désengagement de l'autopilot de FlightGear:
- ailes à plat !
-gaz au mini et sortir les AF. La vitesse diminue, et l'avion se cabre un peu
pour ne pas plonger... et il finit par poser le train principal.
- dès que ce touché est fait, freiner légèrement -> la roue avant va alors à son tour toucher la piste, ce qui permet
à l'auto-rudder de guider la trajectoire suivant l'axe de la piste.
( Tant que la roue avant ne touche pas, l'auto-rudder, qui n'agit alors qu'aérodynamiquement sur la gouverne de direction,
n'est pas assezefficace).
Le tout suivi d'un freinage, on pose avec arrêt complet sur 850m (sans faire craquer la structure...).
Avec les inverseurs de poussée, on doit pouvoir faire bien mieux encore. Quant au porte-avion, il est normalement
équipé d'un câble de retenue qu'on accroche avec une perche (sur un jet militaire, sans doute pas avec notre Cessna Citation X)
**/
String s1;
float alti1;
float GPS_distance_seuil_piste;
TFT480.setFreeFont ( FSS9) ;
TFT480.setTextColor ( GRIS_FONCE, NOIR) ;
//TFT480.fillRect(180, 0, 20, 16, JAUNE); // JAUNE pour test. efface 1/2 le bandeau d'information en haut
voyant_L.affiche ( BLANC, GRIS_TRES_FONCE) ;
voyant_G.affiche ( BLANC, GRIS_TRES_FONCE) ;
voyant_APP.affiche ( BLANC, GRIS_TRES_FONCE) ;
uint8_t AZ = 0 ; // flag azimut OK
uint8_t GL = 0 ; // flag glide OK
//voyant_descente_GPS.affiche(BLANC, GRIS_TRES_FONCE);
//--------------------- (si autoland engagé, sinon on ne fait rien de plus)--------------
//TFT480.fillRect(HA_x0-40, HA_y0+80, 87, 15, HA_SOL); // efface "APP"
if ( read_bit( flags, bit_autoland) == 1 )
{
calculs_GPS( ) ;
if ( GPS_distance_piste > 25.0 )
{
return ; // rien de plus
}
else
{
//WARNING = "autoland ON";
//affi_float_test(liste_bali[num_bali].orient_pisteAB,110, 2, BLANC, BLEU); // pour test
//affi_float_test(GPS_azimut_piste,110, 3, BLANC, GRIS_FONCE); // pour test
voyant_APP.affiche ( NOIR, JAUNE) ;
// -------------------- AZIMUT -----------------------------------------------------------------
float op1;
find_sens_approche( ) ;
affi_sens_APP( ) ; // en haut à droite
if ( sens_app_effectif == sens_AB) { op1 = orient_pisteAB; }
if ( sens_app_effectif == sens_BA) { op1 = orient_pisteBA; }
//s1 = String(op1,1);
//TFT480.drawString(s1, 0, 250);
float delta_AZM = op1 - GPS_azimut_piste;
//affi_float_test(delta_AZM,110, 2, VERT, GRIS_FONCE); // pour test
delta_AZM *= 20.0 ;
borne_in( & delta_AZM, - 35.0 , 35.0 ) ;
//if((delta_AZM >-10.0)&&(delta_AZM <10.0))
if ( is_in( delta_AZM, - 10.0 , 10.0 ) == 1 )
{
voyant_L.affiche ( NOIR, VERT) ;
AZ= 1 ;
}
affi_localizer( delta_AZM * - 2.5 ) ;
hdg1 = round( op1 - delta_AZM) ;
//affi_float_test(hdg1,110, 5, VERT, GRIS_FONCE); // pour test
// -------------------- VITESSE -----------------------------------------------------------------
if ( ( GPS_distance_piste < 20.0 ) && ( target_speed> 180 ) ) { target_speed = 180 ; }
if ( ( GPS_distance_piste < 10.0 ) && ( target_speed> 170 ) ) { target_speed = 170 ; }
if ( ( GPS_distance_piste < 5.0 ) && ( target_speed> 160 ) ) { target_speed = 160 ; }
if ( ( GPS_distance_piste < 2.0 ) && ( target_speed> 140 ) ) { target_speed = 140 ; }
//if ( (GPS_distance_piste < 1.0) && (target_speed>130) ) {target_speed =130;}
if ( ( vitesse - target_speed) > 4 ) { speedbrake = 1.0 ; } else { speedbrake = 0 ; }
// -------------------- HAUTEUR -----------------------------------------------------------------
//voyant_descente_GPS.affiche(NOIR, JAUNE);
float longueur_piste_NM = longueur_piste / 1852.0 ;
GPS_distance_seuil_piste = GPS_distance_piste - ( longueur_piste_NM/ 2.0 ) ; // + 0.1;
// Rappel : "GPS_distance_piste" est la distance au point CENTRAL de la piste
TFT480.setFreeFont ( FM12) ;
TFT480.setTextColor ( BLANC) ;
s1= String( GPS_distance_seuil_piste, 1 ) ;
s1+= " NM" ;
TFT480.fillRect ( 150 , 300 , 100 , 25 , GRIS_AF) ; // efface
TFT480.drawString ( s1, 150 , 300 ) ;
//affi_float_test(GPS_distance_seuil_piste, 110, 2, BLANC, BLEU); // pour test
float alti_correcte = liste_bali[ num_bali] .altitude + 300.0 * GPS_distance_seuil_piste;
if ( alti_correcte > 3000 ) { alti_correcte = 3000 ; }
affi_asel( alti_correcte) ;
// soit 3000ft pour 10 nautiques -> pente 5%
//sachant que la ref de position est située au milieu de la longueur de la piste
//affi_float_test(alti_correcte, 110, 2, BLANC, BLEU); // pour test
float erreur_altitude = altitude_GPS - alti_correcte;
//affi_float_test(erreur_altitude, 110, 3, BLANC, BLEU); // pour test
if ( ( erreur_altitude > - 20 ) && ( erreur_altitude < 20 ) )
{
//voyant_G.affiche(NOIR, VERT);
}
affi_index_lateral( - erreur_altitude / 3.0 ) ; // affiche les triangles roses latéraux
/**Rappels :
1 NM (nautical mile ou 'nautique') = 1852 m
1 feet = 0,3048 m
1 NM = 1852/0.3048 = 6076.12 feet
1 noeud (nd) = 1NM/h = 1852/3600 = 0.51444 m/s
début de descente (5%) vers la piste : 3000ft à 10NM, vitesse 150 nd (par exemple)
v=150*0.51444 = 77.17m/s
temps pour parcourir la distance : v=d/t
t=d/v = 10*1852m / 77.17 = 240 s (soit 4 minutes)
taux de descente = 3000ft/240s = 12.5 fps
**/
if ( ( GPS_distance_piste < 10 ) && ( hauteur_AAL > 1500 ) ) // && (hauteur_AAL <= 6000)
{
// initialisation de l'approche auto (palier puis descente)
//voyant_descente_GPS.affiche(NOIR, VERT);
locks_type = "VS" ; // bascule le pilote auto de FG en mode vertical speed
//climb_rate = -5.0;
}
//if ((GPS_distance_piste < 30) && (hauteur_AAL < (liste_bali[num_bali].niveau_de_vol_mini * 100) ) )
if ( ( GPS_distance_piste < 10 ) && ( hauteur_AAL < 8000 ) )
{
// descente
// correction du taux de descente (climb_rate) pour respecter la pente à 3° (=5%)
voyant_G.affiche ( NOIR, VERT) ;
GL= 1 ;
//if (erreur_altitude > 4) {climb_rate -= 5; }
//if (erreur_altitude < -4) {climb_rate += 5; }
climb_rate = erreur_altitude * - 1.5 ;
if ( climb_rate > + 30 ) { climb_rate = + 30 ; }
if ( climb_rate < - 50 ) { climb_rate = - 50 ; }
//affi_float_test( erreur_altitude, 110, 4, NOIR, JAUNE); // pour test
}
// -------------------- FLAPS -----------------------------------------------------------------
if ( is_in( GPS_distance_piste, 6 , 8 ) )
{
poste_warning( "flaps 15" ) ;
flaps = 2 ;
landing_light1= 1 ;
landing_light2= 1 ;
}
if ( is_in( GPS_distance_piste, 5 , 6 ) )
{
poste_warning( "gear down" ) ;
gear_down = 1 ;
}
if ( is_in( GPS_distance_piste, 2 , 5 ) )
{
flaps = 3 ; // participe grandement au freinage (l'asservissement précis des gaz maintiendra la bonne vitesse)
poste_warning( "flaps 20" ) ;
}
if ( GPS_distance_piste <= 2 )
{
poste_warning( "flaps 35" ) ;
flaps = 4 ;
}
// -------------------- FINALE -----------------------------------------------------------------
if ( hauteur_AAL < hauteur_mini_autopilot) // signe la fin des appels de cette fonction
{
raz_bit( & flags, bit_rudder_decol) ;
raz_bit( & flags, bit_nav_to_pti) ;
raz_bit( & flags, bit_nav_to_ptAA) ;
raz_bit( & flags, bit_nav_to_ptBB) ;
raz_bit( & flags, bit_route) ;
throttle = 1.0 ; // gaz au minimum
//target_speed = 120;
if ( read_bit( flags, bit_att_short) == 1 ) { target_speed = 100 ; } else { target_speed = 120 ; }
//trim_elevator = 0.0;
ailerons= 0 ;
raz_bit( & flags, bit_FG_AP) ;
desengage_autoland( ) ; // donc on ne repassera plus dans la fonction (ici)
brake_left = 0 ;
brake_right = 0 ;
find_sens_approche( ) ; //NE DOIT plus etre calculé ultérieurement! (lorsqu'on a dépassé le centre de la piste) !
//set_bit(&flags, bit_rudder_attero); // gouverne de lacet en mode automatique
set_bit( & flags, bit_atterrissage) ; // on passera dorénavant en boucle dans la fonction "atterrissage()"
affiche_etats_flags( ) ;
//WARNING= "end autoland";
}
if ( ( AZ== 1 ) && ( GL== 1 ) ) { voyant_APP.affiche ( NOIR, VERT) ; }
/**
alti1 = 3.0*GPS_distance_piste + gnd_elv/100.0 -1;
if (alti1 < asel1) //empêche de (re)monter lors de la capture ILS, reste en palier le cas échéant
{
asel1 = alti1;
}
**/
}
// =============================================================================================================================
}
}
void atterrissage( )
// on passera en boucle dans cette fonction
{
// premier terme = léger cabré pour l'arrondi
// deuxième terme diminue ce cabré tant que la hauteur est grande
// troisième terme = asservissement de l'angle de tangage de façon à stabiliser l'ensemble
//trim_elevator = -0.5+ (float)hauteur_AAL/1500.0 + (tangage / 20.0);
//trim_elevator = -0.3 + (tangage / 20.0);
calculs_piste( ) ;
calculs_GPS( ) ;
float H0 = hauteur_AAL;
if ( H0< 0 ) { H0 = 0 ; }
locks_type = "VS" ; // pilote auto de FG en mode vertical speed
// -------------------- TANGAGE -----------------------------------------------------------------
//if (read_bit(flags, bit_att_short) == 1) {climb_rate = -5.0;} else {climb_rate = -4.0;}
climb_rate = - 5.0 ; // -5
trim_elevator = - 0.45 + ( H0/ 200.0 ) + ( tangage/ 20.0 ) ; // H0/300.0
//RAPPEL: throttle 1.0 -> ralentit; 0 -> mi-gaz ; -1.0 -> plein gaz
if ( read_bit( flags, bit_att_short) == 1 )
{
throttle = 1.0 ; // gaz au mini (Rappel: le mini = +1.0, le max = -1.0)
speedbrake = 1.0 ;
}
else
{
throttle = 0.7 ; // gaz presque au mini (Rappel: le mini = +1.0, le max = -1.0)
speedbrake = 0.6 ;
}
ailerons= - roulis/ 10.0 ; // 1.2 //asservissement des ailerons en fonction de l'angle de roulis (-> ailes à plat)
if ( H0 < hauteur_mini_autopilot)
{
raz_bit( & flags, bit_FG_AP) ;
// -------------------- AZIMUT -----------------------------------------------------------------
float op1;
float delta_AZM;
find_sens_approche( ) ;
affi_sens_APP( ) ; // en haut à droite
if ( sens_app_effectif == sens_AB)
{
op1 = orient_pisteAB;
delta_AZM = op1 - GPS_azimut_ptB;
}
if ( sens_app_effectif == sens_BA)
{
op1 = orient_pisteBA;
delta_AZM = op1 - GPS_azimut_ptA;
}
auto_rudder_attero( delta_AZM) ;
// -------------------- VITESSE ----------------------------------------------------------------
//if(is_in(vitesse, 120, 100) == 1) { brake_left =0.6;};
if ( vitesse < 100 )
{
//brake_left =0.5;
throttle = 1.0 ; // gaz au mini
if ( read_bit( flags, bit_att_short) == 1 )
{
brake_left = 1.0 ; // freine à fond
reverser1 = 1 ;
reverser2 = 1 ;
throttle = - 0.95 ;; // gaz au max pour freiner énergiquement avec les reverses
}
} // pose le train avant ce qui permet le guidage au sol en lacet
if ( vitesse < 80 )
{
speedbrake = 1.0 ;
brake_left = 0.8 ; // freine
}
if ( ( vitesse < 40 ) && ( read_bit( flags, bit_att_short) == 1 ) )
{
throttle = 1.0 ; // gaz au mini
brake_left = 1.0 ; // freine très fortement
}
if ( vitesse < 30 )
{
reverser1 = 0 ;
reverser2 = 0 ;
throttle = 1.0 ; // gaz au mini
}
}
brake_right = brake_left;
}
void roulage( )
// sur taxiways
// on passera en boucle dans cette fonction
{
reverser1 = 0 ;
reverser2 = 0 ;
throttle = 0.80 ; // 1.0 -> ralentit; 0 -> mi-gaz ; -1.0 -> plein gaz
WARNING = "Roulage" ;
tempo_message= 5 ;
//affi_message(WARNING, BLANC, GRIS_TRES_FONCE);
brake_left = 0 ;
brake_right = 0 ;
//WARNING="volets 0";
flaps = 0 ;
if ( vitesse < 15 ) { throttle - = 0.01 ; }
if ( vitesse > 15 ) { throttle += 0.01 ; }
borne_in( & throttle, 0.5 , 1.0 ) ;
calcul_erreur_position( ) ;
}
// =============================================================================================================================
void affi_localizer( float valeur_i)
{
//ILS (maintenant GPS) dans le plan horizontal; affiche l'erreur de position par rapport à l'axe de la piste
//affi_float_test(valeur_i, 110, 3, JAUNE, NOIR); // pour test
uint16_t y1 = HA_y0- HA_h- 14 ;
uint16_t couleur1 = ROSE;
loc = HA_x0 + valeur_i; // sachant que HA_x0 par définition est le centre de l'horizon artificiel (et pas le bord de droite)
if ( loc < ( HA_x0- HA_w+ 5 ) ) { loc = HA_x0- HA_w+ 5 ; couleur1 = GRIS; }
if ( loc > ( HA_x0+ HA_w- 5 ) ) { loc= HA_x0+ HA_w- 5 ; couleur1 = GRIS; }
TFT480.fillRect ( HA_x0- HA_w, y1, 2 * HA_w, 9 , GRIS_TRES_FONCE) ;
TFT480.drawLine ( HA_x0, y1- 5 , HA_x0, y1+ 5 , BLANC) ;
affi_indexV( loc, y1, 1 , couleur1) ; // petit triangle rose en haut, se déplaçant horizontalement
memo_loc= loc;
}
void affi_index_lateral( uint16_t position_i)
{
// petits triangles roses de chaque côtés du PFD
// (à mi-hauteur du PFD si =0)
uint16_t x1 = 75 ;
uint16_t x2 = 332 ;
uint16_t position_V = HA_y0 - position_i;
TFT480.fillRect ( x1, 30 , 9 , 2 * HA_h, GRIS_TRES_FONCE) ; // efface
TFT480.fillRect ( x2, 30 , 9 , 2 * HA_h, GRIS_TRES_FONCE) ; // efface
TFT480.drawRect ( x1, HA_y0, 12 , 5 , BLANC) ;
TFT480.drawRect ( x2, HA_y0, 12 , 5 , BLANC) ;
uint16_t couleur1 = ROSE;
if ( position_V < ( HA_y0- HA_h+ 5 ) ) { position_V = HA_y0- HA_h+ 5 ; couleur1 = GRIS; }
if ( position_V > ( HA_y0+ HA_h- 5 ) ) { position_V = HA_y0+ HA_h- 5 ; couleur1 = GRIS; }
affi_indexH( x1, position_V, 1 , couleur1) ;
affi_indexH( x2+ 8 , position_V, - 1 , couleur1) ;
}
void trace_arc_gradu( )
{
//arc gradué en haut au centre, indiquant la valeur de l'inclinaison
float angle;
//Draw_arc_elliptique(HA_x0, 120, 120, 80, 0.6, 2.6, BLANC);
for ( uint8_t n= 0 ; n< 9 ; n++ )
{
angle = 30 + n* 15 ; // 1 tiret tous les 15 degrés
float pourcent = 0.9 ;
if ( ( ( n+ 2 ) % 2 ) == 0 ) { pourcent = 0.8 ; }
affi_rayon1( HA_x0, HA_y0+ 10 , 110 , degTOrad( angle) , pourcent, BLANC, false ) ; // tirets de graduation
}
}
void rotation1( )
{
// consigne de cap
// acquisition de l'encodeur pas à pas (1)
if ( millis( ) - TEMPO >= timer1 )
{
timer1 = millis( ) ;
bool etat = digitalRead( rot1b) ;
if ( etat == 0 ) { hdg1+= 1 ; } else { hdg1- = 1 ; }
if ( hdg1< 0 ) { hdg1= 359 ; }
if ( hdg1> 359 ) { hdg1= 0 ; }
}
}
void rotation2( )
{
// consigne d'altitude
// acquisition de l'encodeur pas à pas (2)
if ( millis( ) - TEMPO >= timer2 )
{
timer2 = millis( ) ;
bool etat = digitalRead( rot2b) ;
if ( etat == 0 ) { asel1+= 1 ; } else { asel1- = 1 ; }
if ( asel1< 1 ) { asel1= 1 ; } // 100 pieds -> 30m
if ( asel1> 600 ) { asel1= 600 ; }
}
}
void init_SDcard( )
{
String s1;
TFT480.fillRect ( 0 , 0 , 480 , 320 , NOIR) ; // efface
TFT480.setTextColor ( BLANC, NOIR) ;
TFT480.setFreeFont ( FF1) ;
uint16_t y= 0 ;
TFT480.drawString ( "PRIMARY FLIGHT DISPLAY" , 0 , y) ;
y+= 20 ;
s1= "version " + version;
TFT480.drawString ( s1, 0 , y) ;
y+= 40 ;
TFT480.setTextColor ( VERT, NOIR) ;
TFT480.drawString ( "Init SDcard" , 0 , y) ;
y+= 20 ;
if ( ! SD.begin ( ) )
{
TFT480.drawString ( "Card Mount Failed" , 0 , y) ;
delay ( 2000 ) ;
TFT480.fillRect ( 0 , 0 , 480 , 320 , NOIR) ; // efface
return ;
}
uint8_t cardType = SD.cardType ( ) ;
if ( cardType == CARD_NONE)
{
TFT480.drawString ( "No SDcard" , 0 , y) ;
delay ( 2000 ) ;
TFT480.fillRect ( 0 , 0 , 480 , 320 , NOIR) ; // efface
return ;
}
flag_SDcardOk= 1 ;
TFT480.drawString ( "SDcard Type: " , 0 , y) ;
if ( cardType == CARD_SD) { TFT480.drawString ( "SDSC" , 150 , y) ; }
else if ( cardType == CARD_SDHC) { TFT480.drawString ( "SDHC" , 150 , y) ; }
y+= 20 ;
uint32_t cardSize = SD.cardSize ( ) / ( 1024 * 1024 ) ;
s1= ( String) cardSize + " GB" ;
TFT480.drawString ( "SDcard size: " , 0 , y) ;
TFT480.drawString ( s1, 150 , y) ;
// listDir(SD, "/", 0);
//Serial.printf("Total space: %lluMB\n", SD.totalBytes() / (1024 * 1024));
//Serial.printf("Used space: %lluMB\n", SD.usedBytes() / (1024 * 1024));
delay ( 1000 ) ;
TFT480.fillRect ( 0 , 0 , 480 , 320 , NOIR) ; // efface
}
void efface_sprite_trajectoire( )
{
SPR_trajectoire.fillSprite ( TFT_BLACK) ;
SPR_trajectoire.drawString ( "pente 5%" , 170 , 1 ) ;
}
void init_sprites( )
{
// sprites représentant les lettres 'N' 'S' 'E' 'O' qui seront affichées sur un cercle, inclinées donc.
SPR_E.setFreeFont ( FF1) ;
SPR_E.setTextColor ( JAUNE) ;
SPR_E.createSprite ( SPR_W, SPR_H) ;
SPR_E.setPivot ( SPR_W/ 2 , SPR_H/ 2 ) ; // Set pivot relative to top left corner of Sprite
SPR_E.fillSprite ( GRIS_TRES_FONCE) ;
SPR_E.drawString ( "E" , 2 , 1 ) ;
SPR_N.setFreeFont ( FF1) ;
SPR_N.setTextColor ( JAUNE) ;
SPR_N.createSprite ( SPR_W, SPR_H) ;
SPR_N.setPivot ( SPR_W/ 2 , SPR_H/ 2 ) ;
SPR_N.fillSprite ( GRIS_TRES_FONCE) ;
SPR_N.drawString ( "N" , 2 , 1 ) ;
SPR_O.setFreeFont ( FF1) ;
SPR_O.setTextColor ( JAUNE) ;
SPR_O.createSprite ( SPR_W, SPR_H) ;
SPR_O.setPivot ( SPR_W/ 2 , SPR_H/ 2 ) ;
SPR_O.fillSprite ( GRIS_TRES_FONCE) ;
SPR_O.drawString ( "W" , 2 , 1 ) ;
SPR_S.setFreeFont ( FF1) ;
SPR_S.setTextColor ( JAUNE) ;
SPR_S.createSprite ( SPR_W, SPR_H) ;
SPR_S.setPivot ( SPR_W/ 2 , SPR_H/ 2 ) ;
SPR_S.fillSprite ( GRIS_TRES_FONCE) ;
SPR_S.drawString ( "S" , 2 , 1 ) ;
SPR_trajectoire.setFreeFont ( FF1) ;
SPR_trajectoire.setTextColor ( JAUNE) ;
SPR_trajectoire.createSprite ( 292 , 88 ) ;
efface_sprite_trajectoire( ) ;
}
void init_Leds( ) // pour l'affichage des données, voir la fonction "affi_data_piste()"
{
uint16_t x0 = 464 ;
uint16_t y0 = 0 ;
uint16_t xi= x0;
uint16_t yi= y0;
Led1.init ( xi,yi, 10 , 10 ) ;
Led1.set_couleur ( ROUGE) ;
Led1.allume ( ) ;
yi+= 10 ;
Led2.init ( xi,yi, 10 , 10 ) ;
Led2.set_couleur ( JAUNE) ;
Led2.allume ( ) ;
yi+= 10 ;
Led3.init ( xi,yi, 10 , 10 ) ;
Led3.set_couleur ( VERT) ;
Led3.allume ( ) ;
yi+= 10 ;
Led4.init ( xi,yi, 10 , 10 ) ;
Led4.set_couleur ( BLEU) ;
Led4.allume ( ) ;
yi+= 10 ;
Led5.init ( xi,yi, 10 , 10 ) ;
Led5.set_couleur ( VIOLET1) ;
Led5.allume ( ) ;
delay( 100 ) ;
}
void int16_to_array( int16_t valeur_i)
{
// prépare la chaine de caract à zéro terminal pour l'envoi
// Remarque : 2^16 -1 = 65535 -> 5 caractères)
String s1= ( String) valeur_i;
uint8_t len1 = s1.length ( ) ;
for ( int n= 0 ; n< len1; n++ )
{
var_array16[ n] = s1[ n] ;
}
var_array16[ len1] = 0 ; // zéro terminal -> chaine C
}
void int32_to_array( int32_t valeur_i)
{
// prépare la chaine de caract à zéro terminal pour l'envoi
// Remarque : 2^32 -1 = 4294967295 -> 10 caractères
String s1= ( String) valeur_i;
uint8_t len1 = s1.length ( ) ;
for ( int n= 0 ; n< len1; n++ )
{
var_array32[ n] = s1[ n] ;
}
var_array32[ len1] = 0 ; // zéro terminal -> chaine C
}
void string_to_array( String str_i)
{
// prépare la chaine de caract à zéro terminal pour l'envoi
uint8_t len1 = str_i.length ( ) ;
for ( int n= 0 ; n< len1; n++ )
{
var_array32[ n] = str_i[ n] ;
}
var_array32[ len1] = 0 ; // zéro terminal -> chaine C
}
void annule_tout( )
{
WARNING = " RAZ " ;
raz_bit( & flags, bit_decollage) ;
raz_bit( & flags, bit_atterrissage) ;
raz_bit( & flags, bit_autoland) ;
raz_bit( & flags, bit_route) ;
raz_bit( & flags, bit_nav_to_piste) ;
raz_bit( & flags, bit_nav_to_pti) ;
raz_bit( & flags, bit_circling) ;
raz_bit( & flags, bit_nav_to_ptAA) ;
raz_bit( & flags, bit_nav_to_ptBB) ;
raz_bit( & flags, bit_rudder_decol) ;
raz_bit( & flags, bit_roulage) ;
raz_bit( & flags, bit_att_short) ;
raz_bit( & flags, bit_rudder_attero) ;
reverser1 = 0 ;
reverser2 = 0 ;
speedbrake= 0 ;
landing_light1= 0 ;
landing_light2= 0 ;
//gear_down = 0;
set_bit( & flags, bit_FG_AP) ;
locks_type = "ALT" ;
speed_ctrl= true ;
trim_elevator= 0 ;
throttle = 0 ; // mi-gaz
}
void setup( )
{
Serial.begin ( 38400 ) ; // 19200
locks_type = "ALT" ;
raz_bit( & flags, bit_FG_AP) ; // pas d'engagement de l'autopilot de FlightGear à ce stade
WiFi.persistent ( false ) ;
WiFi.softAP ( ssid, password) ; // Crée un réseau WiFi en mode privé (indépendant de celui de la box internet...)
IPAddress IP = WiFi.softAPIP ( ) ;
server.on ( "/switch" , HTTP_GET, [ ] ( AsyncWebServerRequest * request) // lecture des boutons de l'ESP du module SW
{
// attention: ce code est appelé par une interruption WiFi qui intervient hors timing. Donc pas d'affichage ici !!
argument_recu1 = request- > arg( "sw1" ) ; // réception de l'argument n°1 de la requête
switches= argument_recu1; // réception des boutons du module SW
v_switches= switches.toInt ( ) ;
flag_traiter_SW= 1 ; //positionne ce drapeau afin que le traitement se fasse dans le timming général, pas ici !
int16_to_array( 0 ) ;
argument_recu2 = request- > arg( "pot1" ) ; // réception de l'argument n°2 de la requête
potar1= argument_recu2; // = "0".."255"
v_potar1 = - 128 + potar1.toInt ( ) ; // centre autour de 0
f_potar1 = v_potar1 / 10.0 ; // -> f_potar1= [-12.7 ... +12.7 ]
float valeur1 = v_potar1 * v_potar1; // au carré pour avoir une bonne précision aux faibles débattements,
//et une bonne réponse à fond (taxi au sol)
//if (abs(v_potar1) > 100) {raz_bit(&flags, bit_rudder_attero);} // afin de pouvoir manoeuvrer sur les taxiways}
if ( v_potar1< 0 ) { valeur1 = - valeur1; } // because un carré est toujours positif, or on veut conserver le signe
rudder_manuel = valeur1 / 20000.0 ; // 10000.0 détermine la sensibilité de la gouverne de direction (lacet)
//cet array because la fonction "request->send_P()" n'accèpte pas directement le string
//rappel :
//void send_P(int code, const String& contentType, const uint8_t * content, size_t len, AwsTemplateProcessor callback=nullptr);
//void send_P(int code, const String& contentType, PGM_P content, AwsTemplateProcessor callback=nullptr);
request- > send_P( 200 , "text/plain" , var_array16) ; // envoie comme réponse au client
} ) ;
server.on ( "/hdg" , HTTP_GET, [ ] ( AsyncWebServerRequest * request) // consigne de cap
{
// attention: ce code est appelé par une interruption WiFi qui intervient hors timing. Donc pas d'affichage ici !!
argument_recu1 = request- > arg( "a1" ) ; // reception de l'argument n°1 de la requête
num_bali= argument_recu1.toInt ( ) ;
argument_recu2 = request- > arg( "swND" ) ;
flag_traiter_SW= 1 ; //positionne ce drapeau afin que le traitement se fasse dans le timming général, pas ici !
v_switches_ND = argument_recu2.toInt ( ) ;
switches_ND = String( v_switches_ND) ;
int16_to_array( hdg1) ;
//cet array because la fonction "request->send_P()" n'accèpte pas directement le string
//rappel :
//void send_P(int code, const String& contentType, const uint8_t * content, size_t len, AwsTemplateProcessor callback=nullptr);
//void send_P(int code, const String& contentType, PGM_P content, AwsTemplateProcessor callback=nullptr);
request- > send_P( 200 , "text/plain" , var_array16) ; // envoie hdg1 comme réponse au client
} ) ;
// réponses aux requêtes :
// VOIR la fonction "void interroge_WiFi()" dans le code du ND (l'affichage de la carte...)
// pour la réception des données qui suivent
server.on ( "/cap" , HTTP_GET, [ ] ( AsyncWebServerRequest * request)
{
int16_to_array( cap) ; // prépare la chaine de caract à zéro terminal pour l'envoi
request- > send_P( 200 , "text/plain" , var_array16) ; // envoie réponse au client
} ) ;
server.on ( "/latitude" , HTTP_GET, [ ] ( AsyncWebServerRequest * request) // latitude de l'avion
{
int32_t lati1 = ( int32_t ) ( lat_avion * 10000.0 ) ;
int32_to_array( lati1) ;
request- > send_P( 200 , "text/plain" , var_array32) ; // envoie réponse au client
} ) ;
server.on ( "/longitude" , HTTP_GET, [ ] ( AsyncWebServerRequest * request) // longitude de l'avion
{
int32_t longi1 = ( int32_t ) ( lon_avion * 10000.0 ) ;
int32_to_array( longi1) ;
request- > send_P( 200 , "text/plain" , var_array32) ; // envoie réponse au client
} ) ;
server.on ( "/hauteur" , HTTP_GET, [ ] ( AsyncWebServerRequest * request) // hauteur de l'avion / sol
{
int32_t haut1 = ( int32_t ) ( hauteur_AAL * 10.0 ) ;
int32_to_array( haut1) ;
request- > send_P( 200 , "text/plain" , var_array32) ; // envoie réponse au client
} ) ;
server.on ( "/flags" , HTTP_GET, [ ] ( AsyncWebServerRequest * request) // paramètres divers PFD -> ND & MCDU
{
argument_recu3 = request- > arg( "btMCDU" ) ; // valeur reçue du module MCDU en tant qu'argument
v_bt_MCDU = argument_recu3.toInt ( ) ;
flag_traiter_MCDU= 1 ;
int32_to_array( flags) ; // valeur à envoyer
request- > send_P( 200 , "text/plain" , var_array32) ; // envoie réponse au client
} ) ;
/*
server.on("/msg", HTTP_GET, [](AsyncWebServerRequest *request) // paramètres divers PFD -> ND & MCDU
{
string_to_array(//WARNING); // valeur à envoyer
request->send_P(200, "text/plain", var_array32); // envoie réponse au client
//WARNING="null";
});
*/
server.on ( "/num_bali" , HTTP_GET, [ ] ( AsyncWebServerRequest * request) // PFD -> MCDU
{
int32_t num1 = ( int32_t ) num_bali;
int32_to_array( num1) ;
request- > send_P( 200 , "text/plain" , var_array32) ; // envoie réponse au client
} ) ;
server.on ( "/Pos_XY" , HTTP_GET, [ ] ( AsyncWebServerRequest * request) //pour recevoir les requêtes émises par le module positionneur
{
argument_recu1 = request- > arg( "X1" ) ; // réception de l'argument n°1 de la requête
x_1= argument_recu1.toInt ( ) ;
argument_recu2 = request- > arg( "Y1" ) ; // réception de l'argument n°2 de la requête
y_1= argument_recu2.toInt ( ) ;
argument_recu2 = request- > arg( "X2" ) ; // réception de l'argument n°3 de la requête
x_2= argument_recu2.toInt ( ) ;
argument_recu2 = request- > arg( "Y2" ) ; // réception de l'argument n°4 de la requête
y_2= argument_recu2.toInt ( ) ;
int32_t num1 = 0 ;
int32_to_array( num1) ;
request- > send_P( 200 , "text/plain" , var_array32) ; // envoie réponse (0) au client
} ) ;
server.begin ( ) ;
pinMode( bouton1, INPUT) ;
pinMode( bouton2, INPUT) ;
//pinMode(led1, OUTPUT);
pinMode( rot1a, INPUT_PULLUP) ;
pinMode( rot1b, INPUT_PULLUP) ;
pinMode( rot2a, INPUT_PULLUP) ;
pinMode( rot2b, INPUT_PULLUP) ;
attachInterrupt( rot1a, rotation1, RISING) ;
attachInterrupt( rot2a, rotation2, RISING) ;
TFT480.init ( ) ;
TFT480.setRotation ( 3 ) ; // 0..3 à voir, suivant disposition
TFT480.fillScreen ( TFT_BLACK) ;
init_SDcard( ) ;
init_sprites( ) ;
delay( 100 ) ;
TFT480.setTextColor ( NOIR, BLANC) ;
// TFT480.fillRect(0, 0, 479, 30, NOIR);
TFT480.setTextColor ( BLANC, NOIR) ;
TFT480.setFreeFont ( FF19) ;
Ay_actu= 120 ;
By_actu= 120 ;
altitude_GPS = 0 ;
vitesse = 0 ;
roulis = 0 ;
tangage = 0 ;
cap= 0 ;
vspeed= 0 ; // vitesse verticale
//vor_frq=123500;
//vor_dst=1852*102; // 102km
//vor_actual_deg=45;
//vor_actual=45.0 * 100.0;
// affichages();
bouton1_etat = digitalRead( bouton1) ;
memo_bouton1_etat = bouton1_etat;
bouton2_etat = digitalRead( bouton2) ;
memo_bouton2_etat = bouton2_etat;
if ( bouton2_etat== 0 )
{
mode_affi_hauteur = AAL;
affi_mode_affi_hauteur( ) ;
}
if ( bouton2_etat== 1 )
{
mode_affi_hauteur = ASL;
affi_mode_affi_hauteur( ) ;
}
init_FG_bali( ) ;
//init_affi_autopilot();
//affi_indicateurs();
voyant_L.init ( 0 ,0 ,30 ,20 ) ;
voyant_L.caract1 = 'L' ;
voyant_L.caract2 = ' ' ;
voyant_G.init ( 35 ,0 ,30 ,20 ) ;
voyant_G.caract1 = 'G' ;
voyant_G.caract2 = ' ' ;
voyant_APP.init ( 70 ,0 ,30 ,20 ) ;
voyant_APP.caract1 = 'A' ;
voyant_APP.caract2 = 'P' ;
voyant_route.init ( 105 ,0 ,30 ,20 ) ;
voyant_route.caract1 = 'G' ;
voyant_route.caract2 = 'T' ;
voyant_RD.init ( 145 ,0 ,30 ,20 ) ;
voyant_RD.caract1 = 'R' ;
voyant_RD.caract2 = 'D' ;
voyant_ATT.init ( 177 ,0 ,15 ,20 ) ;
voyant_ATT.caract1 = 'A' ;
init_Leds( ) ; // et les affiche en bordure de l'écran en haut à droite
annule_tout( ) ;
init_affi_HA( ) ; // affiche juste l'horizon artificiel (ciel + terre) sans les graduations ni les échelles
delay( 100 ) ;
//find_END_RWY_angl();// pour le 1er décollage, on ne repassera plus ici
//prepare_decollage();
//TFT480.fillRect(0, 0, 479, 319, BLEU); // pour test parties libres
////WARNING = "RESTART"; // pour reseter le MCDU
// ^ ne marche pas ICI parce que lorsque le PFD est resété les liaisons wifi sont cassées
// et donc les clients ne reçoivent plus les messages
// toutefois on notera que lorsque l'on reprogramme le PFD, son serveur WIFI reste en fonction... et les liaisons subsistent
//efface_cadre_bas(NOIR); affi_approche(); while(1); // pour test
affi_distance_piste( ) ; // cadre en bas
affi_Airport( ) ; // sous le cadre en bas
String s1 = "PFD v" ;
s1+= version;
poste_warning( s1) ;
}
uint8_t p1;
int32_t number = 0 ;
String s1;
String s2;
void acquisitions( )
{
// cette fonction reçoit les données de Flightgear par la liaison USB, voir le fichier "hardware4.xml" pour le protocole
// Remarque : les données des autres modules (ND et SW) sont reçues par WiFi,
// voir les sous-fonctions ("server.on(...)") dans la fonction setup()
char buf[ 50 ] ;
int32_t valeur;
TFT480.setFreeFont ( FM9) ;
TFT480.setTextColor ( VERT, NOIR) ;
if ( Serial.available ( ) > 14 ) // 14
{
//poste_warning("CONNECTED");
if ( flag_att_cnx_usb== 1 )
{
flag_att_cnx_usb= 0 ;
poste_warning( "usb connected" ) ;
}
parametre= "" ;
s1= "" ;
char octet_in;
while ( octet_in ! = '=' )
{
octet_in = Serial.read ( ) ;
if ( octet_in ! = '=' ) { parametre += octet_in; }
}
while ( octet_in ! = '\n ' )
{
octet_in = Serial.read ( ) ;
if ( octet_in ! = '\n ' ) { s1 += octet_in; }
}
if ( parametre == "joystick1" )
{
s1.toCharArray ( buf, 50 ) ;
valeur = atol ( buf) ;
joystick1 = ( float ) valeur / 1000.0 ;
data_ok |= 1 ; // positionne bit0
}
if ( parametre == "alti" )
{
/*
ALTITUDE GPS (et pas 'altimetre', volontairement, voir le fichier hardware4.xml)
voir la ligne '<node>/instrumentation/gps/indicated-altitude-ft</node>'
marre des QFE, QNH, AGL, ASFC, AMSL, STD...
j'ai joué avec tout ça, mais finalement je décide d'utiliser le GPS,
ce qui est contraire aux recommandations aéronautiques,
sans doute parce que le jour où le GPS mondial viendrait à tomber en panne, c'est 275643 avions qui iraient se poser
dans le Triangle des Bermudes.
mais ici on est dans FlightGear, on ne risque rien !
Et puis on a Galiléo et le système EGNOS développé à l'origine par le cnes puis sur la planète B612 à Toulouse (ESSP)...
*/
s1.toCharArray ( buf, 50 ) ;
valeur = atol ( buf) ;
altitude_GPS_float = ( float ) valeur / 1000.0 ;
altitude_GPS = valeur/ 1000 ; // integer
hauteur_AAL = altitude_GPS - liste_bali[ num_bali] .altitude ;
data_ok |= 1 << 1 ; // positionne bit1
}
if ( parametre == "gnd_elv" ) // hauteur de la surface du terrain situé sous l'avion
{
s1.toCharArray ( buf, 50 ) ;
gnd_elv = atol ( buf) ;
if ( gnd_elv < 0 ) { gnd_elv = 0 ; }
data_ok |= 1 << 2 ; // positionne bit2
}
if ( parametre == "alti_agl" ) // hauteur de l'avion par rapport au terrain en dessous
// (= altitude-agl-ft c.a.d "altitude above graound level")
{
s1.toCharArray ( buf, 50 ) ;
alti_agl = atol ( buf) ;
if ( alti_agl < 0 ) { alti_agl = 0 ; }
data_ok |= 1 << 3 ; // positionne bit3
}
if ( parametre == "speed" )
{
s1.toCharArray ( buf, 50 ) ;
vitesse = atol ( buf) ;
data_ok |= 1 << 4 ; // positionne bit4
}
if ( parametre == "pitch" )
{
//char buf[50];
s1.toCharArray ( buf, 50 ) ;
tangage = atol ( buf) ;
data_ok |= 1 << 5 ; // positionne bit5
}
if ( parametre == "roll" )
{
s1.toCharArray ( buf, 50 ) ;
roulis = atol ( buf) ;
data_ok |= 1 << 6 ; // positionne bit6
}
if ( parametre == "heading" ) // /orientation/heading-deg = cap actuel de l'avion ; ne pas confondre avec HDG bug !
{
s1.toCharArray ( buf, 50 ) ;
valeur = atol ( buf) ;
cap= ( float ) valeur / 100.0 ;
data_ok |= 1 << 7 ; // positionne bit7
}
if ( parametre == "vspeed" )
{
s1.toCharArray ( buf, 50 ) ;
vspeed = atol ( buf) ;
data_ok |= 1 << 8 ; // positionne bit8
}
if ( parametre == "latitude" )
{
s1.toCharArray ( buf, 50 ) ;
valeur = atol ( buf) ;
lat_avion = ( float ) valeur / 100000.0 ;
data_ok |= 1 << 9 ; // positionne bit9
}
if ( parametre == "longitude" )
{
s1.toCharArray ( buf, 50 ) ;
valeur = atol ( buf) ;
lon_avion = ( float ) valeur / 100000.0 ;
data_ok |= 1 << 10 ; // positionne bit10
}
nb_acqui= 11 ; // erreur non permise !!! ne pas oublier qu le compte commence à 0, et pas à 1
}
delay( 3 ) ; // 3 important sinon ne recevra pas la totalité des données (qui se fait en plusieurs passes)
////// pour test
////TFT480.drawString("data= ", 90, 50);
////s2= (String) data_ok;
////TFT480.fillRect(140,50, 50, 15, TFT_BLACK);
////TFT480.drawString(s2, 150, 50);
}
void data_out( )
{
// à destination de FlightGear par la liaison série USB
// voir le fichier "hardware4.xml" pour le protocole et les paramètres
Serial.print ( hdg1) ; // consigne de Cap -> autopilot
Serial.print ( ',' ) ;
Serial.print ( asel1) ; // consigne d'altitude -> autopilot
Serial.print ( ',' ) ;
uint16_t v3 = landing_light1;
Serial.print ( v3) ;
Serial.print ( ',' ) ;
uint16_t v4 = landing_light2;
Serial.print ( v4) ;
Serial.print ( ',' ) ;
uint16_t v5 = target_speed;
Serial.print ( v5) ; // écrit la consigne de vitesse (target_speed)
Serial.print ( ',' ) ;
uint16_t v6 = hauteur_mini_autopilot;
Serial.print ( v6) ; // écrit la hauteur minimum d'engagement du pilote auto de Flightgear (par défaut = 300)
Serial.print ( ',' ) ;
float v7 = ailerons;
Serial.print ( v7) ;
Serial.print ( ',' ) ;
float v8 = rudder; // position de la gouverne de direction (lacet)
Serial.print ( v8) ;
Serial.print ( ',' ) ;
uint8_t v9 = view_number;
Serial.print ( v9) ;
Serial.print ( ',' ) ;
float v10 = climb_rate; // vertical speed en fps (feet per second)
// Note : correspond au paramètre <node>/autopilot/settings/target-climb-rate-fps</node>
Serial.print ( v10) ;
Serial.print ( ',' ) ;
Serial.print ( locks_type) ; // "ALT" ou "VS"
Serial.print ( ',' ) ;
/* Note : correspond au paramètre suivant dans le fichier 'harware4.xml' :
<chunk>
<name>locks</name>
<node>/autopilot/locks/altitude</node>
<type>string</type>
</chunk>
*/
if ( read_bit( flags, bit_FG_AP) == 1 ) { AP_status = "AP" ; } else { AP_status = "" ; }
Serial.print ( AP_status) ; // "" ou "AP"
Serial.print ( ',' ) ;
Serial.print ( speed_ctrl) ; // boolean : false ou true
Serial.print ( ',' ) ;
// j'ai commenté la partie "Elevator" dans le fichier joystick_0.xml
// (usr/share/games/flightgear/Input/Joysticks/Local/joystick_0.xml)
// donc les actions de la fonction tangage sur la gouverne de profondeur passent dorénavant par ici
// ce qui implique que l'avion n'est pas pilotable si l'ESP32 du PFD n'est pas en fonction
// l'avantage est qu'il devient possible d'agir sur le tangage lors des phases de décollage et d'attérrissage auto.
/*
if ((read_bit(flags, bit_FG_AP) == 1) || (read_bit(flags, bit_rudder_decol) == 1))
{
elevator = trim_elevator; // uniquement auto
}
else
{
elevator = -1.0 * (joystick1/2.0); // on garde la main
}
*/
elevator = trim_elevator; // uniquement auto
Serial.print ( elevator) ;
Serial.print ( ',' ) ;
Serial.print ( throttle) ;
Serial.print ( ',' ) ;
Serial.print ( reverser1) ;
Serial.print ( ',' ) ;
Serial.print ( reverser2) ;
Serial.print ( ',' ) ;
Serial.print ( flaps) ;
Serial.print ( ',' ) ;
Serial.print ( speedbrake) ;
Serial.print ( ',' ) ;
Serial.print ( gear_down) ; // boolean : false ou true
Serial.print ( ',' ) ;
Serial.print ( brake_left) ;
Serial.print ( ',' ) ;
Serial.print ( brake_right) ;
Serial.print ( '\n ' ) ;
}
void affi_nop( )
{
for ( int8_t dy= - 2 ; dy< 3 ; dy++ )
{
TFT480.drawLine ( HA_x0- HA_w, HA_y0- HA_h + dy, HA_x0 + HA_w, HA_y0 + HA_h + dy, ROUGE) ;
TFT480.drawLine ( HA_x0- HA_w, HA_y0+ HA_h + dy, HA_x0 + HA_w, HA_y0 - HA_h + dy, ROUGE) ;
}
//TFT480.fillRect(0, 0, 239, 30, NOIR);
TFT480.setTextColor ( BLANC, ROUGE) ;
TFT480.setFreeFont ( FF18) ;
TFT480.drawString ( "No Data" , HA_x0- 40 , HA_y0+ 30 ) ;
}
void init_affi_autopilot( )
{
TFT480.setFreeFont ( FF1) ;
TFT480.setTextColor ( JAUNE, GRIS_AF) ;
// ALT
//TFT480.drawString("ALT", x_autopilot, 260, 1);
//TFT480.drawRoundRect(x_autopilot-4, 255, 45, 42, 5, BLANC);
}
void affi_autopilot( uint8_t complet)
{
// dans le petit cercle en bas à gauche :
// affiche HDG (flèche jaune), piste (rectangle bleu), VOR (Nav1, ligne verte)
uint16_t x0= 70 ; // 70
uint16_t y0= 248 ; // 255
TFT480.setFreeFont ( FF1) ;
TFT480.fillRect ( x0, y0+ 2 , 70 , 80 , NOIR) ; // efface
TFT480.drawCircle ( x0+ 35 , y0+ 34 , 30 , BLANC) ;
TFT480.setTextColor ( BLANC, NOIR) ;
TFT480.drawString ( "N" , x0+ 30 , y0- 5 ) ;
TFT480.setTextColor ( BLANC, NOIR) ;
TFT480.drawString ( "S" , x0+ 30 , y0+ 60 ) ;
TFT480.setTextColor ( BLANC, NOIR) ;
TFT480.drawString ( "E" , x0+ 60 , y0+ 27 ) ;
TFT480.drawString ( "W" , x0, y0+ 27 ) ;
//uint16_t x1,y1;
// rectangle bleu, très fin -> orientation ('radial') de l'axe de la piste
float angle2 = orient_pisteAB;
affi_rectangle_incline( x0+ 35 , y0+ 34 , 35 , 90 + angle2, BLEU_CLAIR) ;
if ( complet == 1 )
{
TFT480.setTextColor ( JAUNE, NOIR) ;
TFT480.drawString ( "HDG" , x0, y0- 18 ) ;
String s1 = ( String) hdg1;
TFT480.setTextColor ( BLANC, NOIR) ;
TFT480.drawString ( s1, x0+ 18 , y0+ 35 ) ;
// flèche jaune = règlage HDG de l'autopilot
float angle1 = 90 - hdg1;
affi_rayon2( x0+ 35 , y0+ 34 , 0 , 30 , angle1, JAUNE, 0 ) ; // tige de la flèche
affi_pointe( x0+ 35 , y0+ 34 , 30 , angle1, 0.1 , JAUNE) ; // pointe triangulaire en bout de flèche
}
else
{
if ( sens_app_effectif == sens_AB)
{
affi_pointe( x0+ 35 , y0+ 34 , 20 , 90.0 - angle2, 0.5 , JAUNE) ;
TFT480.drawString ( "A->B" , 240 , 250 ) ;
}
if ( sens_app_effectif == sens_BA)
{
affi_pointe( x0+ 35 , y0+ 34 , 20 , 270.0 - angle2, 0.5 , JAUNE) ;
TFT480.drawString ( "B->A" , 240 , 250 ) ;
}
}
}
void affi_approche( ) // grand rectangle en bas avec le tracé de la pente de descente (glide)
{
uint16_t x1= 90 ;
uint16_t x2= 140 ;
uint16_t x3= 310 ;
uint16_t x4= 350 ;
uint16_t y1= 240 ;
uint16_t y2= 310 ;
uint16_t x_avion;
uint16_t y_avion;
float xF;
float yF;
float pente;
xF = ( float ) x3 - GPS_distance_piste * ( float ) ( x3- x2) / 10.0 ;
yF = ( float ) y2 - ( altitude_GPS - liste_bali[ num_bali] .altitude ) * ( float ) ( y2- y1) / 3000.0 ;
x_avion = ( uint16_t ) xF;
pente = ( float ) ( y2- y1) / ( float ) ( x3- x2) ;
TFT480.drawLine ( x1, y1, x2, y1, BLANC) ; // trace ligne blanche (glide : trajectoire théorique)
TFT480.drawLine ( x2, y1, x3, y2, BLANC) ; // trace ligne blanche (glide : trajectoire théorique)
TFT480.drawLine ( x3, y2, x4, y2, BLANC) ; // trace ligne blanche (glide : trajectoire théorique)
TFT480.setFreeFont ( FM9) ;
TFT480.setTextColor ( BLANC, NOIR) ;
TFT480.drawString ( "glide" , x2+ 10 , y2- 30 ) ;
affi_autopilot( 0 ) ;
//dessine l'avion sur la ligne, avec une trainée jaune comme trace
if ( memo_y_avion > 235 ) // pour ne pas effacer hors cadre
{
TFT480.fillCircle ( memo_x_avion, memo_y_avion, 5 , GRIS_TRES_FONCE) ; // efface
SPR_trajectoire.pushSprite ( 70 , 232 , TFT_BLACK) ; // TFT_BLACK -> défini la couleur de transparence
//TFT480.drawCircle(memo_x_avion, memo_y_avion, 10, JAUNE); // efface
//TFT480.drawPixel( memo_x_avion, memo_y_avion, JAUNE); // trace la trajectoire réelle en jaune
}
if ( ( x_avion > x1) && ( x_avion<= x2) )
{
//y_avion = y1;
TFT480.drawLine ( x1, y1, x2, y1, BLANC) ; // trace ligne blanche (trajectoire théorique)
//TFT480.fillRect(x_avion+1, y_avion, 8, 4, BLEU); // dessine avion
if ( y_avion > 235 )
{
TFT480.fillCircle ( x_avion, y_avion, 5 , BLEU) ;
SPR_trajectoire.drawPixel ( x_avion- 70 , y_avion- 232 , JAUNE) ;
}
}
if ( ( x_avion > x2) && ( x_avion<= x3) )
{
y_avion = ( uint16_t ) yF;
TFT480.drawLine ( x2, y1, x3, y2, BLANC) ;
if ( y_avion > 235 )
{
TFT480.fillCircle ( x_avion, y_avion, 5 , BLEU) ;
SPR_trajectoire.drawPixel ( x_avion- 70 , y_avion- 232 , JAUNE) ;
}
}
if ( ( x_avion > x3) && ( x_avion<= x4) )
{
y_avion = y2;
TFT480.drawLine ( x3, y2, x4, y2, BLANC) ;
if ( y_avion > 235 )
{
TFT480.fillCircle ( x_avion, y_avion, 5 , BLEU) ;
SPR_trajectoire.drawPixel ( x_avion- 70 , y_avion- 232 , JAUNE) ;
}
}
memo_x_avion = x_avion;
memo_y_avion = y_avion;
//SPR_trajectoire.pushSprite(70, 232, TFT_BLACK); // TFT_BLACK -> défini la couleur de transparence
}
void affichages( )
{
if ( roulis < - 45 ) { roulis = - 45 ; }
if ( roulis > 45 ) { roulis = 45 ; }
if ( tangage < - 30 ) { tangage = - 30 ; }
if ( tangage > 30 ) { tangage = 30 ; }
affi_HA( ) ;
dessine_avion( ) ;
affi_elevator( ) ;
affi_vitesse( ) ;
affi_hauteur_RWY( ) ;
affi_vt_verticale( ) ;
affi_acceleration( ) ;
if ( locks_type ! = "VS" ) { affi_asel( asel1* 100 ) ; } // attention -> résultat sur 32 bits !!!
affi_target_speed( ) ;
affi_flags( ) ;
affi_rudder( ) ;
if ( read_bit( flags, bit_autoland) == 1 )
{
affi_approche( ) ;
}
else
{
trace_arc_gradu( ) ;
affi_cap( ) ;
affi_autopilot( 1 ) ; // dans le petit cercle en bas à gauche
//affi_indicateurs();
affi_switches( ) ;
//affi_radial_VOR();
//affi_Airport();
}
// //affi_message(String s, uint16_t txt_couleur, uint16_t back_couleur)
//bargraph_float_test(GPS_azimut_piste/360.0);
//bargraph_float_test(GPS_distance_piste);
}
void traitement_boutons( )
{
// ======================================================================================
// BOUTONS DU module SW (le boitier qui ne comprend que des boutons, sans écran)
//---------------------------------------------------------------------------------------
// les valeurs sont tranmises par WiFi
// voir leur réception ici dans la fonction "setup()"
// cette fonction traite également les boutons des autres modules (ND, MCDU), voir plus bas
flag_traiter_SW = 0 ;
if ( v_switches ! = memo_v_switches)
{
memo_v_switches = v_switches;
if ( ( v_switches & 1 ) == 1 )
{
if ( read_bit( flags, bit_autoland) == 0 )
{
if ( hdg1> 30 ) { hdg1 - = 30 ; } else { hdg1+= 330 ; } // la barre à tribord 30° !
RAZ_chrono( ) ;
}
}
if ( ( v_switches & 2 ) == 2 )
{
if ( read_bit( flags, bit_autoland) == 0 )
{
if ( hdg1< 330 ) { hdg1 += 30 ; } else { hdg1- = 330 ; } // la barre à babord 30° !
RAZ_chrono( ) ;
}
}
// altitude
if ( ( v_switches & 4 ) == 4 )
{
if ( is_in( asel1, 46 , 190 ) ) { asel1 += 10 ; } // consigne d'altitude +1000ft
else if ( is_in( asel1, 20 , 45 ) ) { asel1 += 5 ; }
else if ( is_in( asel1, 0 , 19 ) ) { asel1 += 1 ; }
if ( asel1> 200 ) { asel1= 200 ; }
}
if ( ( v_switches & 8 ) == 8 )
{
if ( is_in( asel1, 46 , 190 ) ) { asel1 - = 10 ; } // consigne d'altitude -1000ft
else if ( is_in( asel1, 21 , 45 ) ) { asel1 - = 5 ; }
else if ( is_in( asel1, 1 , 20 ) ) { asel1 - = 1 ; }
if ( asel1< 0 ) { asel1= 0 ; }
}
// vitesse
if ( ( v_switches & 16 ) == 16 )
{
if ( target_speed< 180 ) { target_speed += 5 ; } // consigne de vitesse
else if ( ( target_speed>= 180 ) && ( target_speed< 600 ) ) { target_speed += 20 ; }
}
if ( ( v_switches & 32 ) == 32 )
{
if ( ( target_speed> 180 ) && ( target_speed< 600 ) ) { target_speed - = 20 ; }
else if ( ( target_speed<= 180 ) && ( target_speed> 90 ) ) { target_speed - = 5 ; }
}
if ( ( v_switches & 64 ) == 64 ) // bouton "RAZ"
{
annule_tout( ) ;
poste_warning( " RAZ " ) ;
}
if ( ( v_switches & 128 ) == 128 ) // bouton HDG SYNC
{
hdg1 = cap;
RAZ_chrono( ) ;
poste_warning( " SYNC " ) ;
}
}
/**
// ===============================================================
// INVERSEUR à levier du module ND
//----------------------------------------------------------------
if(v_switches_ND != memo_v_switches_ND)
{
memo_v_switches_ND = v_switches_ND;
if (read_bit(v_switches_ND ,1)==1)
{
TFT480.fillCircle(465, 310, 5, BLEU_CLAIR);
landing_light1=1;
landing_light2=1;
}
else
{
TFT480.fillCircle(465, 310, 5, NOIR);
landing_light1=0;
landing_light2=0;
}
}
**/
// ===============================================================
// BOUTONS du module MCDU (le module avec écran 3.5")
//----------------------------------------------------------------
if ( v_bt_MCDU ! = memo_v_bt_MCDU)
{
memo_v_bt_MCDU = v_bt_MCDU;
affi_etats_bt_MCDU( ) ;
// >>>>>>>>>>>>>>>>> ROUGE <<<<<<<<<<<<<<<<<<<<<<<<<<<<<<
if ( read_bit( v_bt_MCDU, bit_bt1) == 1 )
{
Led1.allume ( ) ;
if ( hauteur_AAL < 50 )
{
if ( GPS_distance_piste < 2 )
{
//inv_bit(&flags, bit_rudder_decol);// toggle manuel de ce drapeau; permet d'effectuer un décollage
// en mode manuel ou auto (concernant la gouverne de direction)
////if(read_bit(flags, bit_rudder_decol) ==1)
////{
////find_END_RWY_angl();
////}
inv_bit( & flags, bit_decollage) ;
affiche_etats_flags( ) ;
if ( read_bit( flags, bit_decollage) == 1 )
{
prepare_decollage( ) ;
poste_warning( "decollage" ) ;
}
if ( read_bit( flags, bit_decollage) == 0 )
{
annule_tout( ) ;
poste_warning( " RAZ " ) ;
}
}
else
{
poste_warning( "BAD RWY" ) ;
}
}
}
else { Led1.eteint ( ) ; }
// >>>>>>>>>>>>>>>>> JAUNE <<<<<<<<<<<<<<<<<<<<<<<<<<<<<<
if ( read_bit( v_bt_MCDU, bit_bt2) == 1 )
{
Led2.allume ( ) ;
inv_bit( & flags, bit_FG_AP) ; // -> toggle Autopilot de FlightGear
if ( hauteur_AAL > 300 ) // feet
{
if ( read_bit( flags, bit_FG_AP) == 1 )
{
poste_warning( "engage AP" ) ;
speed_ctrl = true ;
}
}
if ( read_bit( flags, bit_FG_AP) == 0 )
{
poste_warning( " RAZ " ) ;
annule_tout( ) ;
}
}
else { Led2.eteint ( ) ; }
// >>>>>>>>>>>>>>>>> VERT <<<<<<<<<<<<<<<<<<<<<<<<<<<<<<
if ( read_bit( v_bt_MCDU, bit_bt3) == 1 ) // -> en ROUTE
{
Led3.allume ( ) ;
inv_bit( & flags, bit_route) ; // change d'état...
// et teste le résultat
if ( read_bit( flags, bit_route) == 1 ) // && (GPS_distance_piste > 1.0) )
{
// on commence à descendre le cas échéant
//if(GPS_distance_ptAA < 20.0) { if (asel1 >60) {asel1 =60;} }
//if(GPS_distance_ptAA < 15.0) { if (asel1 >30) {asel1 =30;} }
poste_warning( "en ROUTE" ) ;
desengage_autoland( ) ;
raz_bit( & flags, bit_roulage) ;
}
/*
if (GPS_distance_piste < 1.0)
{
raz_bit(&flags, bit_route);
//WARNING ="d<1NM !"; // à destination des autres modules (par WiFi, voir server.on("/msg"... dans le setup)
TFT480.setFreeFont(FF6);
//affi_message(WARNING, BLANC, GRIS_TRES_FONCE); // ici
}
*/
}
else { Led3.eteint ( ) ; }
// >>>>>>>>>>>>>>>>> BLEU <<<<<<<<<<<<<<<<<<<<<<<<<<<<<<
if ( read_bit( v_bt_MCDU, bit_bt4) == 1 ) // fait tourner la selection RWY -> ptA -> ptB ...
{
Led4.allume ( ) ;
raz_bit( & flags, bit_route) ; // désenclenche le suivi de route pour éviter de zigzaguer pendant le choix
// il faudra le réarmer manuellement avec le bouton précédent ('vert')
poste_warning( "en ROUTE" ) ;
options_route ++; // 0 = RWW ; 1=ptA ; 2=ptB ; 3=crc1 ; 4=crc2
if ( ( options_route == 1 ) && ( liste_bali[ num_bali] .sens_app_interdit == 'A' ) ) { options_route++; }
else if ( ( options_route == 2 ) && ( liste_bali[ num_bali] .sens_app_interdit == 'B' ) ) { options_route++; }
if ( options_route> 4 ) { options_route= 0 ; }
if ( options_route == 0 ) //(RWW)
{
////WARNING += String(liste_bali[num_bali].ID_OACI);
if ( GPS_distance_ptAA > 100 ) { asel1 = 100 ; } // ou 370 en croisière (37 000 ft soit 11 000m) à voir...
if ( is_in( GPS_distance_ptAA, 15 , 100 ) ) { asel1 = 60 ; } // 6000 ft, local
set_bit( & flags, bit_nav_to_piste) ;
////WARNING="to RWY";
////WARNING += "- ";
raz_bit( & flags, bit_nav_to_ptAA) ;
raz_bit( & flags, bit_nav_to_ptBB) ;
raz_bit( & flags, bit_nav_to_pti) ;
}
if ( options_route == 1 ) // ptA
{
if ( GPS_distance_ptAA > 100 ) { asel1 = 100 ; } // ou 370 en croisière (37 000 ft soit 11 000m) à voir...
if ( is_in( GPS_distance_ptAA, 15 , 100 ) ) { asel1 = 60 ; } // 6000 ft, local
set_bit( & flags, bit_nav_to_ptAA) ;
////WARNING="to AA";
////WARNING += " - ";
raz_bit( & flags, bit_nav_to_piste) ;
raz_bit( & flags, bit_nav_to_ptBB) ;
raz_bit( & flags, bit_nav_to_pti) ;
}
if ( options_route == 2 ) //ptB
{
if ( GPS_distance_ptBB > 100 ) { asel1 = 100 ; } // ou 370 en croisière ()37 000 ft soit 11 000m) à voir...
if ( is_in( GPS_distance_ptBB, 15 , 100 ) ) { asel1 = 60 ; } // 6000 ft, local
set_bit( & flags, bit_nav_to_ptBB) ;
////WARNING="to BB";
////WARNING += " - ";
raz_bit( & flags, bit_nav_to_piste) ;
raz_bit( & flags, bit_nav_to_ptAA) ;
raz_bit( & flags, bit_nav_to_pti) ;
}
if ( options_route == 3 ) // crc1 ( hypodromes dans un sens)
{
set_bit( & flags, bit_circling) ;
raz_bit( & flags, bit_sens_circling) ;
set_bit( & flags, bit_nav_to_pti) ;
////WARNING="crc1";
////WARNING += " - ";
raz_bit( & flags, bit_nav_to_piste) ;
raz_bit( & flags, bit_nav_to_ptAA) ;
raz_bit( & flags, bit_nav_to_ptBB) ;
}
if ( options_route == 4 ) // crc2 ( hypodromes dans l'autre sens)
{
set_bit( & flags, bit_circling) ;
set_bit( & flags, bit_sens_circling) ;
set_bit( & flags, bit_nav_to_pti) ;
////WARNING="crc2";
////WARNING += " - ";
raz_bit( & flags, bit_nav_to_piste) ;
raz_bit( & flags, bit_nav_to_ptAA) ;
raz_bit( & flags, bit_nav_to_ptBB) ;
}
////WARNING += String(liste_bali[num_bali].ID_OACI);
}
else { Led4.eteint ( ) ; }
// >>>>>>>>>>>>>>>>> VIOLET <<<<<<<<<<<<<<<<<<<<<<<<<<<<<<
if ( read_bit( v_bt_MCDU, bit_bt5) == 1 )
{
if ( hauteur_AAL< 20 )
{
inv_bit( & flags, bit_roulage) ;
if ( read_bit( flags, bit_roulage) == 0 )
{
throttle = 1.0 ; // gaz à zéro.
poste_warning( "stop" ) ;
brake_left= 1 ;
brake_right= 1 ;
}
else
{
annule_tout( ) ;
set_bit( & flags, bit_roulage) ;
poste_warning( "roulage" ) ;
brake_left= 0 ;
brake_right= 0 ;
}
}
else
{
raz_bit( & flags, bit_roulage) ; // pas question d'engager le roulage auto lorsque l'avion est en vol !!!
inv_bit( & flags, bit_att_short) ; // en vol permet de choisir le type d'atterrisage, long ou court.
}
Led5.allume ( ) ;
}
else { Led5.eteint ( ) ; }
}
}
void poste_warning( String texte_i)
{
if ( WARNING ! = texte_i)
{
WARNING = texte_i;
tempo_message= 5 ;
}
}
void toutes_les_5s( )
{
}
void toutes_les_1s( )
{
nb_secondes++; // ne concerne pas le chrono de la ligne suivante
affiche_chrono( ) ;
inc_chrono( ) ;
//affi_int_test(alti_agl, 100, 2, VERT, NOIR);
// if((alti_agl < 100) && ( read_bit(flags, bit_decollage) ==0) ) {affi_hauteur_SOL(alti_agl);}
if ( nb_secondes> 5 )
{
nb_secondes= 0 ;
toutes_les_5s( ) ;
}
dV = 10 * ( vitesse - memo_vitesse) ;
memo_vitesse = vitesse;
if ( vitesse > 150 ) // désengage auto_rudder en fin de décollage
{
raz_bit( & flags, bit_rudder_decol) ; // en vol la gouverne de lacet se commande au pédalier (dans ce programme, avec un pot
//raz_bit(&flags, bit_rudder_attero);
}
if ( read_bit( flags, bit_au_sol) == 1 )
{
// désengage l'autoland ILS après attéro pour éviter de re-décoller avec cet autoland engagé
if ( read_bit( flags, bit_autoland) == 1 ) { desengage_autoland( ) ; }
//asel1 =30; // penser à re-règler cette valeur manuellement avant de ré-engager l'autopilot !
}
affiche_etats_flags( ) ;
affi_alti_agl( ) ;
calculs_GPS( ) ;
//affi_dst_GPS();
if ( read_bit( flags, bit_route) == 1 )
{
if ( read_bit( flags, bit_nav_to_piste) == 1 ) { nav_to_centre_piste( ) ; }
if ( read_bit( flags, bit_nav_to_ptAA) == 1 ) { nav_to_ptAA( ) ; }
if ( read_bit( flags, bit_nav_to_ptBB) == 1 ) { nav_to_ptBB( ) ; }
if ( read_bit( flags, bit_circling) == 1 ) { tour_de_piste( ) ; } // recalcul de la position du point pti
if ( read_bit( flags, bit_nav_to_pti) == 1 ) { nav_to_pti( ) ; }
}
/*
if ((memo_GPS_distance_piste - GPS_distance_piste) > 0 )
{
raz_bit(&flags, bit_eloignement);
//TFT480.fillCircle(300, 5, 5, VERT);
}
else
{
set_bit(&flags, bit_eloignement);
//TFT480.fillCircle(300, 5, 5, ROUGE);
}
*/
memo_GPS_distance_piste = GPS_distance_piste;
if ( GPS_distance_piste < 2 )
{
raz_bit( & flags, bit_nav_to_piste) ; // désengage la navigation auto vers le centre de la piste
}
if (
( read_bit( flags, bit_autoland) == 0 )
&& ( read_bit( flags, bit_circling) == 0 )
&& ( read_bit( flags, bit_decollage) == 0 )
&& ( read_bit( flags, bit_nav_to_ptAA) == 0 )
&& ( read_bit( flags, bit_nav_to_ptBB) == 0 )
&& ( read_bit( flags, bit_nav_to_pti) == 0 )
&& ( read_bit( flags, bit_route) == 0 )
&& ( alti_agl < 100 )
)
{
//WARNING = "gear down";
gear_down = 1 ;
}
/*
if(alti_agl >= 100 )
{
if (gear_down == 1) {poste_warning("gear UP");}
gear_down =0;
}
*/
auto_landing( ) ; // ne sera effectif que si le flag autoland !=0
//toutefois la fonction est toujours appelée afin d'actualiser les affichages
//affi_distance_ptBB(); // pour test
//TFT480.fillRect(0, 0, 480, 320, BLEU); // pour test
if ( tempo_message== 5 )
{
efface_message( HA_SOL) ;
affi_message( WARNING, BLANC, GRIS_TRES_FONCE) ;
}
if ( tempo_message> 0 )
{
tempo_message-- ;
if ( tempo_message== 0 ) { efface_message( HA_SOL) ; }
}
}
/** ==================================================================
variable à gérer obligatoirement */
//le nombre de ports GPIO libres étant atteint, on va utiiser un switch unique pour deux fonctions :
uint8_t fonction_bt1 = 1 ; // 0=saisie écran ; 1=changement de vue
/**======================================================================================================
LOOP
====================================================================================================== */
uint16_t t= 0 ; // temps -> rebouclera si dépassement
void loop( )
{
//if (SerialBT.available()) { Serial.write(SerialBT.read()); }
//le bouton connecté à CET ESP32-ci est partagé entre deux fonctions, voir ci-dessus "variables à gérer obligatoirement"
bouton1_etat = digitalRead( bouton1) ;
if ( bouton1_etat ! = memo_bouton1_etat) // vue
{
memo_bouton1_etat = bouton1_etat;
if ( bouton1_etat== 0 )
{
TFT480.fillCircle ( 450 , 310 , 5 , VERT) ;
if ( fonction_bt1 == 0 ) { write_TFT_on_SDcard( ) ; }
if ( fonction_bt1 == 1 )
{
if ( view_number == 0 ) { view_number = 1 ; } else { view_number = 0 ; }
}
}
if ( bouton1_etat== 1 )
{
TFT480.fillCircle ( 450 , 310 , 5 , NOIR) ;
if ( fonction_bt1== 1 )
{
;
}
}
}
bouton2_etat = digitalRead( bouton2) ; // mode affichage de la hauteur / altitude
if ( bouton2_etat ! = memo_bouton2_etat)
{
memo_bouton2_etat = bouton2_etat;
if ( bouton2_etat== 0 )
{
mode_affi_hauteur = AAL;
affi_mode_affi_hauteur( ) ;
}
if ( bouton2_etat== 1 )
{
mode_affi_hauteur = ASL;
affi_mode_affi_hauteur( ) ;
}
}
if ( ( flag_traiter_SW == 1 ) || ( flag_traiter_MCDU == 1 ) )
{
// le positionnement de ce drapeau se fait dans l'interruption WiFi "server.on("/switch"..."
// définie dans le setup()
// la commande, en amont, provient de l'ESP n°3 qui gère les switches
flag_traiter_SW = 0 ;
flag_traiter_MCDU = 0 ;
traitement_boutons( ) ;
}
temps_ecoule = micros( ) - memo_micros;
if ( temps_ecoule >= 1E6 ) // (>=) et pas strictement égal (==) parce qu'alors on rate l'instant en question
{
memo_micros = micros( ) ;
toutes_les_1s( ) ;
}
if ( dV > acceleration) { acceleration++; }
if ( dV < acceleration) { acceleration-- ; }
//---------------------------------------------------------------------------------------
/*
compteur1+=1;
if (compteur1 >= 100) // tous les 100 passages dans la boucle
{
compteur1=0;
}
*/
acquisitions( ) ;
// affi_float_test(joystick1, 100, 2, VERT, NOIR); // ok
if ( num_bali ! = memo_num_bali)
{
memo_num_bali = num_bali;
calculs_piste( ) ;
calcul_ptAA_ptBB( liste_bali[ num_bali] .dst_pt_AB ) ;
affi_Airport( ) ;
}
if ( vitesse < 30 ) { set_bit( & flags, bit_au_sol) ; }
if ( alti_agl > 100 ) { raz_bit( & flags, bit_au_sol) ; }
if ( vitesse < 20 )
{
raz_bit( & flags, bit_rudder_attero) ; // ce qui permet de reprendre le guidage manuel au sol en fin d'attéro
}
if ( read_bit( flags, bit_atterrissage) == 1 ) { atterrissage( ) ; }
if ( read_bit( flags, bit_roulage) == 1 ) { roulage( ) ; }
/*
if ((read_bit(flags, bit_rudder_decol) ==1 ))
{
calculs_GPS();
auto_rudder_deco();
}
*/
/** ----------------------------------------------
pour tester si data_ok à bien la valeur attendue, c.a.d si toutes les acquisitions sont effectuées
ce qui est le cas lorsque le dialogue avec le serveur de protocole FG est correctement programmé
sachant que ce ne sont pas les pièges qui manquent !
Les 6 lignes de code qui suivent peuvent faire gagner une journée...
Il suffit d'analyser la valeur affichée en binaire pour voir les bits qui restent à 0 -> problèmes (à priori de libellés)
Il doit y avoir une correspondance stricte entre les noms de variables ici et celles émises par le fichier hardware4.xml
*/
////TFT480.setFreeFont(FM9);
////TFT480.setTextColor(VERT, NOIR);
////s2= (String) data_ok;
////TFT480.fillRect(150, 220, 80, 12, TFT_BLACK);
////TFT480.drawString(s2, 150, 220);
/** ---------------------------------------------- **/
if ( data_ok == ( ( 1 << nb_acqui) - 1 ) ) // si toutes les acquisitions faites
{
TFT480.fillCircle ( 435 , 310 , 5 , VERT) ;
if ( attente_data == 1 )
{
attente_data= 0 ;
//TFT480.fillScreen(TFT_BLACK);
//init_affi_HA();
//init_affi_autopilot();
}
affichages( ) ;
calculs_GPS( ) ;
data_ok= 0 ;
data_out( ) ; // ** à commenter le cas échéant pour libérer le port série lors de la mise au point **
}
else
{
TFT480.fillCircle ( 435 , 310 , 5 , ROUGE) ;
if ( attente_data== 1 )
{
affi_nop( ) ;
RAZ_variables( ) ;
affichages( ) ;
delay( 100 ) ;
}
}
//if ((vitesse > 120) && (altitude_GPS > 200)) {raz_bit(&flags, bit_au_sol);}
if ( ( vitesse < 50 ) && ( hauteur_AAL < 20 ) )
{
raz_bit( & flags, bit_FG_AP) ; // désengage (ici) l'autopilot de FG
affi_extremite( ) ;
}
////v_test1 += 0.01;
////if (v_test1 > 1.0) {v_test1 = -1.0;}
////bargraph_float_test(v_test1);
if ( read_bit( flags, bit_decollage) == 1 )
{
decollage( ) ;
}
// Les 4 lignes suivantes affichent un rectangle jaune déplaçable et redimensionnable depuis le module "PositionneurXY"
// lors de la mise au point, pour faciliter le positionnement des éléments graphiques
// les commenter par la suite
/*
affi_ligne1_V(x_1);
affi_ligne2_V(x_2);
affi_ligne1_H(y_1);
affi_ligne2_H(y_2);
*/
//affi_f_potar1();
//---------------------------------------------------------------------------------------
}
/** ***************************************************************************************
CLASS VOYANT // affiche un nombre ou un petit texte dans un rectangle
ainsi que (en plus petit) deux valeurs supplémentaires, par ex: les valeurs mini et maxi
********************************************************************************************/
// Constructeur
VOYANT:: VOYANT ( )
{
}
void VOYANT:: init ( uint16_t xi, uint16_t yi, uint16_t dxi, uint16_t dyi)
{
x0 = xi;
y0 = yi;
dx = dxi;
dy = dyi;
//TFT480.setTextColor(BLANC, NOIR);
}
void VOYANT:: affiche ( uint16_t couleur_texte_i, uint16_t couleur_fond_i)
{
TFT480.fillRoundRect ( x0, y0, dx, dy, 3 , couleur_fond_i) ;
if ( caract2 ! = ' ' )
{
TFT480.setTextColor ( couleur_texte_i) ;
TFT480.setFreeFont ( FM9) ;
TFT480.drawChar ( x0+ 3 , y0+ 14 , caract1, couleur_texte_i, couleur_fond_i, 1 ) ;
TFT480.setTextColor ( couleur_texte_i) ;
TFT480.setFreeFont ( FM9) ;
TFT480.drawChar ( x0+ 16 , y0+ 14 , caract2, couleur_texte_i, couleur_fond_i, 1 ) ;
}
else if ( caract1 ! = ' ' )
{
TFT480.setTextColor ( couleur_texte_i) ;
TFT480.setFreeFont ( FM9) ;
TFT480.drawChar ( x0+ 8 , y0+ 14 , caract1, couleur_texte_i, couleur_fond_i, 1 ) ;
}
}
/** ***************************************************************************************
CLASS Led // affiche un petit rectangle coloré
********************************************************************************************/
// Constructeur
Led:: Led ( )
{
}
void Led:: init ( uint16_t xi, uint16_t yi, uint16_t dxi, uint16_t dyi)
{
x0 = xi;
y0 = yi;
dx = dxi;
dy = dyi;
}
void Led:: allume ( )
{
TFT480.fillRect ( x0, y0, dx, dy, couleur) ;
}
void Led:: eteint ( )
{
TFT480.fillRect ( x0, y0, dx, dy, GRIS_TRES_FONCE) ;
//TFT480.drawRect(x0, y0, dx, dy, couleur); // bordure
}
void Led:: set_couleur ( uint16_t coul_i)
{
couleur = coul_i;
}
/**
-----------------------------------------------------------------------------------------------------------
ci-dessous contenu du fichier (pour Linux): "/usr/share/games/protocol/hardware4.xml" qui va bien pour CE programme
(et CETTE version)
IMPORTANT : Lorsque je fais évoluer le programme principal (ci-dessus) je modifie également (le cas échéant)
le fichier hardware4.xml (ci-dessous)
je ne numérote pas le fichier ci-dessous.
(en le recopiant au bon endroit, ici ce n'est qu'un commentaire non fonctionnel en tant que tel).
en effet les variables transmises par FG doivent correspondre EXACTEMENT à ce qu'attend l'ESP32,
voir la fonction "void acquisitions()"
FG doit être lancé avec les paramètres suivants :
--generic=serial,in,2,/dev/ttyUSB0,9600,hardware4
--generic=serial,out,2,/dev/ttyUSB0,9600,hardware4
IMPORTANT :
-Il faut ajouter ces DEUX lignes dans un lanceur (tel que "FGo!") pour obtenir un fonctionnement bidirectionnel
-"ttyUSB0" peut être autre chose suivant la configuration de votre Linux et de l'ordinateur.
Remarques :
- le nom du fichier "hardware4.xml" peut être autre chose pourvu que le paramètre de lancement corresponde exactement au nom.
- le fichier en question n'existe pas par défaut dans le répertoire "/usr/share/games/protocol/", il faut le créer.
Astuce : pour gagner du temps au décollage, on peut lancer FG avec les options en ligne de commande suivantes (en plus de celles
vues plus haut):
--prop:/autopilot/locks/heading=HDG
--prop:/autopilot/locks/altitude=ALT
--prop:/autopilot/locks/speed-ctrl=true
--prop:/autopilot/settings/target-speed-kt=160
ce qui configure l'autopitot correctement en adéquation avec notre PFD
les deux premières lignes en particulier permettent de piloter l'avion depuis le PFD en tournant les encoreurs rotatifs du cap
et de l'altitude
elles permetttent également de contrôler l'avion en mode autopilot et landing auto ILS (guidage glide et localizer)
-----------------------------------------------------------------------------------------------------------
<?xml version="1.0"?>
<PropertyList>
<generic>
<output>
<binary_mode>false</binary_mode>
<line_separator>\n</line_separator>
<var_separator>\n</var_separator>
<preamble></preamble>
<postamble></postamble>
<chunk>
<name>Joystick_tangage</name>
<node>/devices/status/joysticks/joystick/axis[1]</node>
<type>integer</type>
<factor>1000</factor>
<format>joystick1=%i</format>
</chunk>
<chunk>
<name>Altitude</name>
<node>/instrumentation/gps/indicated-altitude-ft</node>
<type>integer</type>
<factor>1000</factor>
<format>alti=%i</format>
</chunk>
<chunk>
<name>altitude_agl</name>
<type>integer</type>
<node>/position/altitude-agl-ft</node>
<format>alti_agl=%i</format>
</chunk>
<chunk>
<name>ground_elevation</name>
<type>integer</type>
<node>/position/ground-elev-ft</node>
<format>gnd_elv=%i</format>
</chunk>
<chunk>
<name>Speed</name>
<node>/velocities/airspeed-kt</node>
<type>integer</type>
<format>speed=%i</format>
</chunk>
<chunk>
<name>Tangage</name>
<node>/orientation/pitch-deg</node>
<type>integer</type>
<format>pitch=%i</format>
</chunk>
<chunk>
<name>Roulis</name>
<node>/orientation/roll-deg</node>
<type>integer</type>
<format>roll=%i</format>
</chunk>
<chunk>
<name>Cap</name>
<node>/orientation/heading-deg</node>
<type>integer</type>
<factor>100</factor>
<format>heading=%i</format>
</chunk>
<chunk>
<name>Vertical_speed</name>
<node>/velocities/vertical-speed-fps</node>
<type>integer</type>
<format>vspeed=%i</format>
</chunk>
<chunk>
<name>latitude</name>
<node>/position/latitude-deg</node>
<type>integer</type>
<factor>100000</factor>
<format>latitude=%i</format>
</chunk>
<chunk>
<name>longitude</name>
<node>/position/longitude-deg</node>
<type>integer</type>
<factor>100000</factor>
<format>longitude=%i</format>
</chunk>
<chunk>
<name>Nav1_actual</name>
<type>integer</type>
<node>/instrumentation/nav/radials/actual-deg</node>
<factor>100</factor>
<format>vor_actual=%i</format>
</chunk>
</output>
<input>
<line_separator>\n</line_separator>
<var_separator>,</var_separator>
<chunk>
<name>heading_bug</name>
<node>/autopilot/settings/heading-bug-deg</node>
<type>integer</type>
<relative>false</relative>
</chunk>
<chunk>
<name>asel</name>
<node>/autopilot/settings/asel</node>
<type>integer</type>
<relative>false</relative>
</chunk>
<chunk>
<name>landing-light1</name>
<node>/controls/lighting/landing-light</node>
<type>integer</type>
<relative>false</relative>
</chunk>
<chunk>
<name>landing-light2</name>
<node>/controls/lighting/landing-light[1]</node>
<type>integer</type>
<relative>false</relative>
</chunk>
<chunk>
<name>target_speed</name>
<node>/autopilot/settings/target-speed-kt</node>
<type>integer</type>
<relative>false</relative>
</chunk>
<chunk>
<name>minimums</name>
<node>/autopilot/settings/minimums</node>
<type>integer</type>
<relative>false</relative>
</chunk>
<chunk>
<name>ailerons</name>
<node>/controls/flight/aileron</node>
<type>float</type>
<relative>false</relative>
</chunk>
<chunk>
<name>rudder</name>
<node>/controls/flight/rudder</node>
<type>float</type>
<relative>false</relative>
</chunk>
<chunk>
<name>view_number</name>
<node>/sim/current-view/view-number</node>
<type>integer</type>
<relative>false</relative>
</chunk>
<chunk>
<name>climb_rate</name>
<node>/autopilot/settings/target-climb-rate-fps</node>
<type>float</type>
<relative>false</relative>
</chunk>
<chunk>
<name>locks</name>
<node>/autopilot/locks/altitude</node>
<type>string</type>
</chunk>
<chunk>
<name>AP_status</name>
<node>/autopilot/locks/AP-status</node>
<type>string</type>
</chunk>
<chunk>
<name>Speed_ctrl</name>
<node>/autopilot/locks/speed-ctrl</node>
<type>bool</type>
</chunk>
<chunk>
<name>elevator</name>
<node>/controls/flight/elevator</node>
<type>float</type>
<relative>false</relative>
</chunk>
<chunk>
<name>throttle</name>
<node>/controls/engines/throttle-all</node>
<type>float</type>
<relative>false</relative>
</chunk>
<chunk>
<name>reverser1</name>
<node>/controls/engines/engine/reverser</node>
<type>bool</type>
</chunk>
<chunk>
<name>reverser2</name>
<node>/controls/engines/engine[1]/reverser</node>
<type>bool</type>
</chunk>
<chunk>
<name>flaps</name>
<node>/controls/flight/flaps-select</node>
<type>integer</type>
<relative>false</relative>
</chunk>
<chunk>
<name>speedbrake</name>
<node>/controls/flight/speedbrake</node>
<type>float</type>
<relative>false</relative>
</chunk>
<chunk>
<name>gear_down</name>
<node>/controls/gear/gear-down</node>
<type>bool</type>
<relative>false</relative>
</chunk>
<chunk>
<name>brake_left</name>
<node>/controls/gear/brake-left</node>
<type>float</type>
<relative>false</relative>
</chunk>
<chunk>
<name>brake_right</name>
<node>/controls/gear/brake-right</node>
<type>float</type>
<relative>false</relative>
</chunk>
</input>
</generic>
</PropertyList>
>
**/
CODE SOURCE: Liste des aérodromes en C++
#ifndef FG_DATA_H
#define FG_DATA_H
//
// ==================================
String version_datas= "36.4" ;
// ==================================
/*
Liste des balises VOR et ILS
RAMARQUE : Ce fichier est commun aux codes sources FG_panel et FG_radio, il ne doit figurer qu'une fois sur le disque
la seconde occurence nécessaire pour la compilation peut se faire par un lien symbolique (sous Linux),
ou par placement judicieux dans un dossier partagé par le système Arduino (comme c'est le cas par exemple pour les lib graphiques).
Quoi qu'il en soit, la même version doit être compilée dans les deux programmes,
afin de rendre les affichages cohérents entre les deux côtés, ainsi que leur utilisation.
Tout ceci dans le but d'alléger les données échangées par WiFi entre les deux montages, et donc le temps de traitement.
Seul le numéro de l'aérodrome choisi sera transmis.
*/
/*
todo:
-Calais
-Cherbourg
-Gibraltar
-Istres-Le-Tube
-La Rochelle
-Lannion
-Londres
-Lyon
-Madrid
-Nantes
-Naple
-Palma
-Perpignan-Rivesaltes
-Pise
-Reykjavik
-Rouen
-Salon-de-Provence
-St Nazaire
-St-Malo
-Tanger
-Venise
*/
/**
Lien : https://fr.wikipedia.org/wiki/Liste_des_codes_OACI_des_a%C3%A9roports/L
**/
//ATTENTION : pour toute modif de ce fichier, il faut recompiler le source ET reprogrammer le ND ainsi que le PFD afin
// qu'ils exploitent bien les même données.
// Le ND envoie le n° de balise en cours au PFD (par WiFi) qui en déduit la fréquence radio
// de la balise (par lecture du code de ce fichier inclus) et l'envoie à Flightgear par l'USB
// donc la transmission ND->PFD c'est juste un nombre, qui permet ensuite au PFD de connaitre toutes les caractéristiques de l'aérodrome.
// ce nombre est transmis sous la forme d'un argument lors d'une requête html.
// Voir la requête "void httpGetHDG()" du ND, et la fonction "setup()" du PFD
/*
struct FGBAL
{
char ID_OACI[4+1];
char nom[18+1];
float orient_piste; // orientation de la piste
uint16_t altitude; // (feet)
float latitude;
float longitude;
uint16_t longueur; //en m
};
*/
struct FGBAL
{
char ID_OACI[ 4 + 1 ] ;
char nom[ 18 + 1 ] ;
uint16_t altitude; // (en feet)
// extrémités de la piste (A et B):
float lat_A;
float lon_A;
float lat_B;
float lon_B;
char sens_app_interdit; // 'A', 'B' ou 'X' bout par lequel on doit aborder la piste en finale. X =indifférent, aléatoire
uint16_t niveau_de_vol_mini;
uint8_t dst_pt_AB; // distance du point AA (resp. BB) dont les coordonnées seront calculées lors du choix de l'aérodrome
//float orient_piste; // orientation de la piste // NON ! SERA CALCULEE
//uint16_t longueur; //en m SERA CALCULEE
} ;
//------------------------------------------------------------------------------------------------------------------
// un truc pour la route : les data sont à retrouver dans le fichier apt.dat de FlightGear
// ce fichier fait 2,4 millions de lignes, toutefois il s'ouvre en 2 secondes avec Geany
// (il n'en va pas de même avec un traitement de texte !!!)
// chercher (par exemple) "LFMT"
uint16_t nb_elements= 0 ;
struct FGBAL liste_bali[ 101 ] ; // si > 100 aérodromes, augmenter la taille de cette variable sinon crash du programme
char n_bal_array[ 4 ] ; // 3 char + zero terminal - pour envoi par WiFi
void init_FG_bali( )
{
uint16_t n = 0 ;
//KSFO San Francisco Intl
// 10L 37.62872250 -122.39342127 28R 37.61351918 -122.35716907
// 10R 37.62527727 -122.39074787 28L 37.61169441 -122.35837447
// 01R 37.60620279 -122.38114713 19L 37.62781186 -122.36681630
// 01L 37.60897310 -122.38223043 19R 37.62719258 -122.37015433
strcpy ( liste_bali[ n] .ID_OACI , "KSFO" ) ;
strcpy ( liste_bali[ n] .nom , "San Francisco" ) ;
liste_bali[ n] .altitude = 0 ;
liste_bali[ n] .lat_A = 37.62872250 ;
liste_bali[ n] .lon_A = - 122.39342127 ;
liste_bali[ n] .lat_B = 37.61351918 ;
liste_bali[ n] .lon_B = - 122.35716907 ;
liste_bali[ n] .sens_app_interdit = 'X' ;
liste_bali[ n] .niveau_de_vol_mini = 40 ; // il y a des sommets à 100m dans les parages...
liste_bali[ n] .dst_pt_AB = 15 ; // NM
n++;
// 14 1 0 LEBL Barcelona - El Prat
// 02 41.28775900 002.08483610 20 41.30938568 002.09470900
// 07R 41.28231220 002.07434999 25L 41.29222053 002.10328100
// 07L 41.29324514 002.06727496 25R 41.30572604 002.10372899
strcpy ( liste_bali[ n] .ID_OACI , "LEBL" ) ;
strcpy ( liste_bali[ n] .nom , "BARCELONA" ) ;
liste_bali[ n] .altitude = 13 ;
liste_bali[ n] .lat_A = 41.28231220 ; // 07R , celle // au rivage au bord de l'eau
liste_bali[ n] .lon_A = 2.07434999 ;
liste_bali[ n] .lat_B = 41.29222053 ;
liste_bali[ n] .lon_B = 2.10328100 ;
liste_bali[ n] .sens_app_interdit = 'X' ;
liste_bali[ n] .niveau_de_vol_mini = 30 ;
liste_bali[ n] .dst_pt_AB = 15 ; // NM
n++;
// LFRB Brest
// 07R 48.44338700 -004.43837200 25L 48.45236700 -004.39867000
strcpy ( liste_bali[ n] .ID_OACI , "LFRB" ) ;
strcpy ( liste_bali[ n] .nom , "BREST" ) ;
liste_bali[ n] .altitude = 325 ;
liste_bali[ n] .lat_A = 48.44338700 ;
liste_bali[ n] .lon_A = - 4.43837200 ;
liste_bali[ n] .lat_B = 48.45236700 ;
liste_bali[ n] .lon_B = - 4.39867000 ;
liste_bali[ n] .sens_app_interdit = 'X' ;
liste_bali[ n] .niveau_de_vol_mini = 30 ;
liste_bali[ n] .dst_pt_AB = 15 ; // NM
n++;
// LESO San_Sebastian
// 04 43.35035700 -001.79739800 22 43.36268300 -001.78382400
strcpy ( liste_bali[ n] .ID_OACI , "LESO" ) ;
strcpy ( liste_bali[ n] .nom , "SAN SEBASTIAN" ) ;
liste_bali[ n] .altitude = 15 ;
liste_bali[ n] .lat_A = 43.35035700 ;
liste_bali[ n] .lon_A = - 1.79739800 ;
liste_bali[ n] .lat_B = 43.36268300 ;
liste_bali[ n] .lon_B = - 1.78382400 ;
liste_bali[ n] .sens_app_interdit = 'X' ;
liste_bali[ n] .niveau_de_vol_mini = 40 ;
liste_bali[ n] .dst_pt_AB = 15 ; // NM
n++;
// LFBD Bordeaux Merignac
// 05 44.81921870 -000.72896149 23 44.83874314 -000.70095469
// 11 44.83162304 -000.72924702 29 44.82546392 -000.69985752
strcpy ( liste_bali[ n] .ID_OACI , "LFBD" ) ;
strcpy ( liste_bali[ n] .nom , "BORDEAUX MERIGNAC" ) ;
liste_bali[ n] .altitude = 166 ;
liste_bali[ n] .lat_A = 44.81921870 ;
liste_bali[ n] .lon_A = - 0.72896149 ;
liste_bali[ n] .lat_B = 44.83874314 ;
liste_bali[ n] .lon_B = - 0.70095469 ;
liste_bali[ n] .sens_app_interdit = 'B' ;
liste_bali[ n] .niveau_de_vol_mini = 30 ;
liste_bali[ n] .dst_pt_AB = 15 ; // NM
n++;
// LFBO Toulouse Blagnac
// 14R 43.64411400 001.34593100 32L 43.61898100 001.37209700
// 14L 43.63736400 001.35762200 32R 43.61564400 001.38022500
strcpy ( liste_bali[ n] .ID_OACI , "LFBO" ) ;
strcpy ( liste_bali[ n] .nom , "TOULOUSE BLAGNAC" ) ;
liste_bali[ n] .altitude = 499 ; // feet
liste_bali[ n] .lat_A = 43.64411400 ;
liste_bali[ n] .lon_A = 1.34593100 ;
liste_bali[ n] .lat_B = 43.61898100 ;
liste_bali[ n] .lon_B = 1.37209700 ;
liste_bali[ n] .sens_app_interdit = 'B' ;
liste_bali[ n] .niveau_de_vol_mini = 30 ;
liste_bali[ n] .dst_pt_AB = 15 ; // NM
n++;
// LFBT Tarbes Ossun Lourdes
// 43.16598600 -000.01275000 20 43.19130000 000.00006900
// remarque : la piste est à cheval sur le Méridien d'Origine...
strcpy ( liste_bali[ n] .ID_OACI , "LFBT" ) ;
strcpy ( liste_bali[ n] .nom , "TARBES" ) ;
liste_bali[ n] .altitude = 1186 ; // feet
liste_bali[ n] .lat_A = 43.16598600 ;
liste_bali[ n] .lon_A = - 0.01275000 ;
liste_bali[ n] .lat_B = 43.19130000 ;
liste_bali[ n] .lon_B = 0.00006900 ;
liste_bali[ n] .sens_app_interdit = 'A' ;
liste_bali[ n] .niveau_de_vol_mini = 60 ;
liste_bali[ n] .dst_pt_AB = 15 ; // NM
n++;
// LFCK Mazamet
// 14 43.56266100 002.28210300 32 43.54983900 002.29626100
// attention: sommet (Pic de Nore) alt 1200m (3900 feet !) à 10NM au SE, donc dans le circuit d'approche
// donc décollages et approches par le nord si possible
strcpy ( liste_bali[ n] .ID_OACI , "LFCK" ) ;
strcpy ( liste_bali[ n] .nom , "CASTRES MAZAMET" ) ;
liste_bali[ n] .altitude = 741 ;
liste_bali[ n] .lat_A = 43.56266100 ;
liste_bali[ n] .lon_A = 2.28210300 ;
liste_bali[ n] .lat_B = 43.54983900 ;
liste_bali[ n] .lon_B = 2.29626100 ;
liste_bali[ n] .sens_app_interdit = 'B' ;
liste_bali[ n] .niveau_de_vol_mini = 40 ;
liste_bali[ n] .dst_pt_AB = 15 ; // NM
n++;
// LFKB Bastia Poretta
// 16 42.56333900 009.47916800 34 42.54167700 009.48825000
strcpy ( liste_bali[ n] .ID_OACI , "LFKB" ) ;
strcpy ( liste_bali[ n] .nom , "BASTIA PORETTA" ) ;
liste_bali[ n] .altitude = 26 ;
liste_bali[ n] .lat_A = 42.56333900 ;
liste_bali[ n] .lon_A = 9.47916800 ;
liste_bali[ n] .lat_B = 42.54167700 ;
liste_bali[ n] .lon_B = 9.48825000 ;
liste_bali[ n] .sens_app_interdit = 'X' ;
liste_bali[ n] .niveau_de_vol_mini = 50 ;
liste_bali[ n] .dst_pt_AB = 15 ; // NM
n++;
// LFKC St Catherine
// 18 42.54117000 008.79282700 36 42.52035400 008.79302300
strcpy ( liste_bali[ n] .ID_OACI , "LFKC" ) ;
strcpy ( liste_bali[ n] .nom , "CALVI" ) ; // St.Catherine
liste_bali[ n] .altitude = 209 ;
liste_bali[ n] .lat_A = 42.54117000 ;
liste_bali[ n] .lon_A = 8.79282700 ;
liste_bali[ n] .lat_B = 42.52035400 ;
liste_bali[ n] .lon_B = 8.79302300 ;
liste_bali[ n] .sens_app_interdit = 'B' ;
liste_bali[ n] .niveau_de_vol_mini = 40 ;
liste_bali[ n] .dst_pt_AB = 15 ; // NM
n++;
// LFKF Figari Sud Corse
// 05 41.49452700 009.08600400 23 41.50960100 009.10791600
strcpy ( liste_bali[ n] .ID_OACI , "LFKF" ) ;
strcpy ( liste_bali[ n] .nom , "FIGARI SUD CORSE" ) ;
liste_bali[ n] .altitude = 87 ;
liste_bali[ n] .lat_A = 41.49452700 ;
liste_bali[ n] .lon_A = 9.08600400 ;
liste_bali[ n] .lat_B = 41.50960100 ;
liste_bali[ n] .lon_B = 9.10791600 ;
liste_bali[ n] .sens_app_interdit = 'B' ;
liste_bali[ n] .niveau_de_vol_mini = 40 ;
liste_bali[ n] .dst_pt_AB = 15 ; // NM
n++;
// LFKJ Napoleon Bonaparte
// 02 41.91186937 008.79496744 20 41.93149762 008.80723663
// 10 41.92444700 008.79174100 28 41.92372900 008.80440100
strcpy ( liste_bali[ n] .ID_OACI , "LFKJ" ) ;
strcpy ( liste_bali[ n] .nom , "AJACCIO" ) ; // "NAPOLEON BONAPARTE"
liste_bali[ n] .altitude = 17 ;
liste_bali[ n] .lat_A = 41.91186937 ;
liste_bali[ n] .lon_A = 8.79496744 ;
liste_bali[ n] .lat_B = 41.93149762 ;
liste_bali[ n] .lon_B = 8.80723663 ;
liste_bali[ n] .sens_app_interdit = 'B' ;
liste_bali[ n] .niveau_de_vol_mini = 40 ;
liste_bali[ n] .dst_pt_AB = 15 ; // NM
n++;
// LFLB Aix-Les-Bains
// 18 45.64504575 005.87971068 36 45.63012950 005.88093496
// 18L 45.63803914 005.88121204 36R 45.63172344 005.88173284
strcpy ( liste_bali[ n] .ID_OACI , "LFLB" ) ;
strcpy ( liste_bali[ n] .nom , "CHAMBERY - Aix-L-B" ) ; // Aix-Les-Bains
liste_bali[ n] .altitude = 778 ;
liste_bali[ n] .lat_A = 45.64504575 ;
liste_bali[ n] .lon_A = 5.87971068 ;
liste_bali[ n] .lat_B = 45.63012950 ;
liste_bali[ n] .lon_B = 5.88093496 ;
liste_bali[ n] .sens_app_interdit = 'B' ; // par moi ! (pas en réel bien sûr)
liste_bali[ n] .niveau_de_vol_mini = 50 ;
liste_bali[ n] .dst_pt_AB = 15 ; // NM sachant qu'une distance < 10NM avec un niveau de départ > 30 conduit à une descente musclée ! >> 5%
// dans le cas de cet aérodrome, c'est ça ou slalomer au dessus du lac entre les montagnes...
//(dans le brouillard, c'est encore mieux !)
n++;
// LFLC Clermont-Ferrand_Auvergne
// 08 45.78482100 003.15074800 26 45.78860300 003.18918600
strcpy ( liste_bali[ n] .ID_OACI , "LFLC" ) ;
strcpy ( liste_bali[ n] .nom , "CLERMONT FERRAND" ) ;
liste_bali[ n] .altitude = 1089 ;
liste_bali[ n] .lat_A = 45.78482100 ;
liste_bali[ n] .lon_A = 3.15074800 ;
liste_bali[ n] .lat_B = 45.78860300 ;
liste_bali[ n] .lon_B = 3.18918600 ;
liste_bali[ n] .sens_app_interdit = 'A' ;
liste_bali[ n] .niveau_de_vol_mini = 50 ;
liste_bali[ n] .dst_pt_AB = 15 ; // NM
n++;
// LFLP Annecy Haute-Sovoie Mont Blanc Meythet
// 04 45.92345900 006.09231400 22 45.93480300 006.10529200
// 4C 45.92552100 006.09699400 22C 45.93149800 006.10380500
strcpy ( liste_bali[ n] .ID_OACI , "LFLP" ) ;
strcpy ( liste_bali[ n] .nom , "ANNECY" ) ; // "ANNECY MEYTHET" Altitude 1521m
liste_bali[ n] .altitude = 1521 ;
liste_bali[ n] .lat_A = 45.92345900 ;
liste_bali[ n] .lon_A = 6.09231400 ;
liste_bali[ n] .lat_B = 45.93480300 ;
liste_bali[ n] .lon_B = 6.10529200 ;
liste_bali[ n] .sens_app_interdit = 'X' ;
liste_bali[ n] .niveau_de_vol_mini = 50 ;
liste_bali[ n] .dst_pt_AB = 15 ; // NM
n++;
// LFLL Lyon Saint Exupery
// 18R 45.74659384 005.08596244 36L 45.71068847 005.09033087
strcpy ( liste_bali[ n] .ID_OACI , "LFLL" ) ;
strcpy ( liste_bali[ n] .nom , "Lyon Saint Exupery" ) ;
liste_bali[ n] .altitude = 820 ; // ft
liste_bali[ n] .lat_A = 45.74659384 ;
liste_bali[ n] .lon_A = 5.08596244 ;
liste_bali[ n] .lat_B = 45.71068847 ;
liste_bali[ n] .lon_B = 5.09033087 ;
liste_bali[ n] .sens_app_interdit = 'X' ;
liste_bali[ n] .niveau_de_vol_mini = 40 ;
liste_bali[ n] .dst_pt_AB = 15 ; // NM
n++;
// LFLY Lyon Bron
// 16 45.73501400 004.94093300 34 45.71932800 004.94761400
strcpy ( liste_bali[ n] .ID_OACI , "LFLY" ) ;
strcpy ( liste_bali[ n] .nom , "Lyon BRON" ) ;
liste_bali[ n] .altitude = 659 ; // ft
liste_bali[ n] .lat_A = 45.73501400 ;
liste_bali[ n] .lon_A = 4.94093300 ;
liste_bali[ n] .lat_B = 45.71932800 ;
liste_bali[ n] .lon_B = 4.94761400 ;
liste_bali[ n] .sens_app_interdit = 'X' ;
liste_bali[ n] .niveau_de_vol_mini = 50 ;
liste_bali[ n] .dst_pt_AB = 15 ; // NM
n++;
// LFMI Istres Le Tube
// 15 43.53777100 004.91330200 0.00 1207.92 3 1 0 1 33 43.50778900 004.93462600 0.00 114.00 3 0 0 1
// 15R 43.52330300 004.91811600 0.00 0.00 0 0 0 0 33L 43.51610700 004.92323400 0.00 0.00 1 0 0 0
strcpy ( liste_bali[ n] .ID_OACI , "LFMI" ) ;
strcpy ( liste_bali[ n] .nom , "Istres Le Tube" ) ;
liste_bali[ n] .altitude = 81 ;
liste_bali[ n] .lat_A = 43.53777100 ;
liste_bali[ n] .lon_A = 4.91330200 ;
liste_bali[ n] .lat_B = 43.50778900 ;
liste_bali[ n] .lon_B = 4.93462600 ;
liste_bali[ n] .sens_app_interdit = 'X' ;
liste_bali[ n] .niveau_de_vol_mini = 30 ;
liste_bali[ n] .dst_pt_AB = 15 ; // NM
n++;
// LFML Marseille Provence
// 13L 43.44912530 005.19729576 31R 43.42727470 005.22845736
// 13R 43.44130300 005.20302200 31L 43.42586400 005.22435300
strcpy ( liste_bali[ n] .ID_OACI , "LFML" ) ;
strcpy ( liste_bali[ n] .nom , "MARSEILLE PROVENCE" ) ;
liste_bali[ n] .altitude = 23 ; // au centre de la piste, qui est fort en pente !
liste_bali[ n] .lat_A = 43.44912530 ;
liste_bali[ n] .lon_A = 5.19729576 ;
liste_bali[ n] .lat_B = 43.42727470 ;
liste_bali[ n] .lon_B = 5.22845736 ;
liste_bali[ n] .sens_app_interdit = 'B' ;
liste_bali[ n] .niveau_de_vol_mini = 40 ;
liste_bali[ n] .dst_pt_AB = 15 ; // NM
n++;
// LFMN Nice/Cote d'Azur
// 04R 43.64658511 007.20258040 22L 43.66554901 007.22843657
// 04L 43.65171156 007.20395740 22R 43.66807997 007.22647422
strcpy ( liste_bali[ n] .ID_OACI , "LFMN" ) ;
strcpy ( liste_bali[ n] .nom , "NICE COTE D'AZUR" ) ;
liste_bali[ n] .altitude = 10 ;
liste_bali[ n] .lat_A = 43.64658511 ;
liste_bali[ n] .lon_A = 7.20258040 ;
liste_bali[ n] .lat_B = 43.66554901 ;
liste_bali[ n] .lon_B = 007.22843657 ;
liste_bali[ n] .sens_app_interdit = 'B' ;
liste_bali[ n] .niveau_de_vol_mini = 30 ; // accès côté ouest, (relief côté est)
liste_bali[ n] .dst_pt_AB = 15 ; // NM
n++;
//13L 43.58614900 003.95574600 31R 43.57281900 003.98222800
strcpy ( liste_bali[ n] .ID_OACI , "LFMT" ) ;
strcpy ( liste_bali[ n] .nom , "MONTPELLIER" ) ;
liste_bali[ n] .altitude = 17 ; // feet
liste_bali[ n] .lat_A = 43.58614900 ;
liste_bali[ n] .lon_A = 3.95574600 ;
liste_bali[ n] .lat_B = 43.57281900 ;
liste_bali[ n] .lon_B = 3.98222800 ;
liste_bali[ n] .sens_app_interdit = 'X' ;
liste_bali[ n] .niveau_de_vol_mini = 30 ;
liste_bali[ n] .dst_pt_AB = 15 ; // NM
n++;
// LFMU Beziers Vias
// 10 43.32402100 003.34238700
// 28 43.32282300 003.36475900
strcpy ( liste_bali[ n] .ID_OACI , "LFMU" ) ;
strcpy ( liste_bali[ n] .nom , "BEZIERS VIAS" ) ;
liste_bali[ n] .altitude = 52 ;
/*
// les valeurs ci-dessous sont celles du fichier d'origine de Flightgear (apt.dat)
liste_bali[n].lat_A = 43.32402100; // 43.32402100
liste_bali[n].lon_A = 3.34238700; // 3.34238700
liste_bali[n].lat_B = 43.32282300; // 43.32282300
liste_bali[n].lon_B = 3.36475900; // 3.36475900
*/
// les valeurs ci-dessous sont celles mesurées avec l'UFO posé au sol en bout de piste
liste_bali[ n] .lat_A = 43.32402254 ; // 43.32402100
liste_bali[ n] .lon_A = 3.342375755 ; // 3.34238700
liste_bali[ n] .lat_B = 43.32282329 ; // 43.32282300
liste_bali[ n] .lon_B = 3.364738854 ; // 3.36475900
liste_bali[ n] .sens_app_interdit = 'X' ;
liste_bali[ n] .niveau_de_vol_mini = 30 ;
liste_bali[ n] .dst_pt_AB = 15 ; // NM
n++;
// LFTW Garons Navy
// 18 43.76929100 004.41555600 100.89 0.00 3 1 0 1
// 36 43.74559700 004.41722000 100.89 0.00 3 0 0 1
strcpy ( liste_bali[ n] .ID_OACI , "LFTW" ) ;
strcpy ( liste_bali[ n] .nom , "NIMES" ) ;
liste_bali[ n] .altitude = 309 ;
liste_bali[ n] .lat_A = 43.76929100 ;
liste_bali[ n] .lon_A = 4.41555600 ;
liste_bali[ n] .lat_B = 43.74559700 ;
liste_bali[ n] .lon_B = 4.41722000 ;
liste_bali[ n] .sens_app_interdit = 'X' ;
liste_bali[ n] .niveau_de_vol_mini = 30 ;
liste_bali[ n] .dst_pt_AB = 15 ; // NM
n++;
// LFMV Caumont
// 16 43.91080605 004.90321905 34 43.90662331 004.90428974 -> longueur 400m !!!
// 17 43.91556441 004.89936384 35 43.89895841 004.90384384
// 17R 43.91292125 004.89919522 35L 43.90673757 004.90086420
strcpy ( liste_bali[ n] .ID_OACI , "LFMV" ) ;
strcpy ( liste_bali[ n] .nom , "AVIGNON Caumont" ) ;
liste_bali[ n] .altitude = 124 ;
liste_bali[ n] .lat_A = 43.91556441 ;
liste_bali[ n] .lon_A = 4.89936384 ;
liste_bali[ n] .lat_B = 43.89895841 ;
liste_bali[ n] .lon_B = 4.90384384 ;
liste_bali[ n] .sens_app_interdit = 'X' ;
liste_bali[ n] .niveau_de_vol_mini = 30 ;
liste_bali[ n] .dst_pt_AB = 15 ; // NM
n++;
// LFPG Paris Charles De Gaulle
// 08L 48.99566392 002.55215505 26R 48.99875734 002.61060285
// 09L 49.02473614 002.52489020 27R 49.02667786 002.56169447
// 08R 48.99292932 002.56581580 26L 48.99486268 002.60243818
// 09R 49.02064475 002.51305527 27L 49.02366525 002.57030334
strcpy ( liste_bali[ n] .ID_OACI , "LFPG" ) ;
strcpy ( liste_bali[ n] .nom , "PARIS Ch-De-Gaulle" ) ;
liste_bali[ n] .altitude = 392 ;
liste_bali[ n] .lat_A = 48.99566392 ;
liste_bali[ n] .lon_A = 2.55215505 ;
liste_bali[ n] .lat_B = 48.99875734 ;
liste_bali[ n] .lon_B = 2.61060285 ;
liste_bali[ n] .sens_app_interdit = 'X' ;
liste_bali[ n] .niveau_de_vol_mini = 30 ;
liste_bali[ n] .dst_pt_AB = 15 ; // NM
n++;
// LSGG Geneva
// 05 46.22579381 006.09093933 23 46.25039752 006.12706146
// 05L 46.23481646 006.09953181 23R 46.24001038 006.10715805
strcpy ( liste_bali[ n] .ID_OACI , "LSGG" ) ;
strcpy ( liste_bali[ n] .nom , "GENEVE" ) ;
liste_bali[ n] .altitude = 1374 ;
liste_bali[ n] .lat_A = 46.22579381 ;
liste_bali[ n] .lon_A = 6.09093933 ;
liste_bali[ n] .lat_B = 46.25039752 ;
liste_bali[ n] .lon_B = 6.12706146 ;
liste_bali[ n] .sens_app_interdit = 'X' ;
liste_bali[ n] .niveau_de_vol_mini = 145 ;
liste_bali[ n] .dst_pt_AB = 15 ; // NM
n++;
// LFNP Nizas
// 11 43.50372800 003.41673200 29 43.50577800 003.40853400
strcpy ( liste_bali[ n] .ID_OACI , "LFNP" ) ;
strcpy ( liste_bali[ n] .nom , "Nizas" ) ;
liste_bali[ n] .altitude = 308 ; // = 94m
liste_bali[ n] .lat_A = 43.50372800 ;
liste_bali[ n] .lon_A = 3.41673200 ;
liste_bali[ n] .lat_B = 43.50577800 ;
liste_bali[ n] .lon_B = 3.40853400 ;
liste_bali[ n] .sens_app_interdit = 'X' ;
liste_bali[ n] .niveau_de_vol_mini = 15 ;
liste_bali[ n] .dst_pt_AB = 15 ; // NM
n++;
/*
strcpy(liste_bali[n].ID_OACI, "TEST");
strcpy(liste_bali[n].nom, "T1");
liste_bali[n].altitude = 0;
liste_bali[n].lat_A = 0;
liste_bali[n].lon_A = 0;
liste_bali[n].lat_B = 0;
liste_bali[n].lon_B = 0;
liste_bali[n].sens_app_interdit ='X';
n++;
*/
nb_elements = n;
}
#endif
CODE SOURCE : Fonctions partagées, en C++
//
// ==================================
String version1= "36.4" ;
// ==================================
#ifndef FONCTIONS1_H
#define FONCTIONS1_H
#define _pi 3.141592653
float raddeg = _pi/ 180.0 ;
// COULEURS RGB565
// Outil de sélection -> http://www.barth-dev.de/online/rgb565-color-picker/
#define NOIR 0x0000
#define MARRON 0x9240
#define ROUGE 0xF800
#define ROSE 0xFBDD
#define ORANGE 0xFBC0
#define JAUNE 0xFFE0
#define JAUNE_PALE 0xF7F4
#define VERT 0x07E0
#define VERT_FONCE 0x02E2
#define PAMPA 0xBED6
#define OLIVE 0x05A3
#define CYAN 0x07FF
#define BLEU_CLAIR 0x455F
#define AZUR 0x1BF9
#define BLEU 0x001F
#define BLEU_FONCE 0x0005
#define MAGENTA 0xF81F
#define VIOLET1 0x781A
#define VIOLET2 0xECBE
#define GRIS_TRES_CLAIR 0xDEFB
#define GRIS_CLAIR 0xA534
#define GRIS 0x8410
#define GRIS_FONCE 0x5ACB
#define GRIS_TRES_FONCE 0x2124
#define GRIS_AF 0x51C5 // 0x3985
#define BLANC 0xFFFF
// AVIONIQUE : Horizon Artificiel (HA):
#define HA_CIEL 0x33FE
#define HA_SOL 0xAA81 //0xDB60
// Width and height of sprite
#define SPR_W 25
#define SPR_H 16
char var_array16[ 6 ] ; // 5 char + zero terminal - pour envoi par WiFi (because 2^16 -1 = 65535 -> 5 caractères)
char var_array32[ 10 ] ; // 10 char + zero terminal - pour envoi par WiFi (because 2^32 -1 = 4294967295 -> 10 caractères)
uint16_t flags= 0 ; // 16 valeurs booléennes dont les bits sont précisés ci-dessous
// attention : pas de notations du type 1<<3 (dans les #define) qui ne sont pas, dans ce cas, précalculées par le compilateur
// mais recopiées telle quelle dans le code
// ce qui entrainerait des erreurs (à l'exécution) par la suite!
// à la rigueur, des notations binaires...
// valeurs des bits pour chaque attribution :
# define bit_au_sol 1 // bit0
# define bit_decollage 2
# define bit_FG_AP 4
# define bit_autoland 8 // procedure d'approche
# define bit_atterrissage 16 // finale et touché des roues
# define bit_rudder_decol 32
# define bit_rudder_attero 64
# define bit_route 128
# define bit_nav_to_piste 256
# define bit_nav_to_pti 512
# define bit_nav_to_ptAA 1024
# define bit_nav_to_ptBB 2048
# define bit_att_short 4096 // atterrissage court (avec reverse, etc..) pour pistes très courtes
# define bit_roulage 8192
# define bit_circling 16384 // tour de piste
# define bit_sens_circling 32768 // sens du tour de piste
// pour les boutons
# define bit_bt1 1
# define bit_bt2 2
# define bit_bt3 4
# define bit_bt4 8
# define bit_bt5 16
/* ******************************************************************************** */
void set_bit( uint16_t * mot_i, uint16_t val_bit) // val_bit étant la valeur du bit (le poids) c.a.d =1 ou 2 ou 4 ou 8...
{
* mot_i |= val_bit;
}
void raz_bit( uint16_t * mot_i, uint16_t val_bit) // val_bit étant la valeur du bit (le poids) c.a.d =1 ou 2 ou 4 ou 8...
{
* mot_i &= ~val_bit;
}
void inv_bit( uint16_t * mot_i, uint16_t val_bit) // val_bit étant la valeur du bit (le poids) c.a.d =1 ou 2 ou 4 ou 8...
{
* mot_i ^ = val_bit;
}
uint8_t read_bit( uint16_t mot_i, uint16_t val_bit) // val_bit étant la valeur du bit (le poids) c.a.d =1 ou 2 ou 4 ou 8...
{
if ( ( mot_i & val_bit) == 0 ) { return 0 ; } else { return 1 ; }
}
uint8_t is_in( float valeur_i, float min, float max)
{
if ( ( valeur_i >= min) && ( valeur_i <= max) ) { return 1 ; } else { return 0 ; }
}
void borne_in( float * valeur_i, float min, float max)
{
if ( * valeur_i < min) { * valeur_i = min; }
if ( * valeur_i > max) { * valeur_i = max; }
}
float distance_AB( float lat_A, float lon_A, float lat_B, float lon_B)
{
float R = 6373.0 ; // en km : rayon de la Terre
//conversions en radians
lat_A *= raddeg; lat_B *= raddeg;
lon_A *= raddeg; lon_B *= raddeg;
float dlat = lat_A - lat_B;
float dlon = lon_A - lon_B;
float a = pow ( sin ( dlat / 2.0 ) ,2 ) + cos ( lat_A) * cos ( lat_B) * pow ( sin ( dlon / 2.0 ) ,2 ) ;
float c = 2.0 * atan2 ( sqrt ( a) , sqrt ( 1 - a) ) ;
float d= R * c;
return d; // en km
}
/*
calcul angle entre deux points WGS84
voir https://fr.wikipedia.org/wiki/Trigonom%C3%A9trie_sph%C3%A9rique
latitudes et longitudes en degrés décimaux (ex: 43.47684)
nonbre négatif si longitude Ouest
*/
float azimut_AB( float lat_A, float lon_A, float lat_B, float lon_B) //retour float en degrés
{
//conversions en radians
lat_A *= raddeg; lat_B *= raddeg;
lon_A *= raddeg; lon_B *= raddeg;
float delta_lon = lon_B - lon_A;
float y = sin ( delta_lon) * cos ( lat_B) ;
float x = cos ( lat_A) * sin ( lat_B) - sin ( lat_A) * cos ( lat_B) * cos ( delta_lon) ;
float resultat = atan2 ( y, x) / raddeg;
if ( resultat< 0 ) { resultat += 360.0 ; }
return resultat; //retour en degrés
}
float arc_cos_sin( float cosAlpha, float sinAlpha)
{
//cettte fonction retourne l'angle en fontion du couple [cos, sin] ce qui lève l'ambiguite sur 4 quadrants
if ( sinAlpha >= 0 ) { return acos ( cosAlpha) ; } else { return - acos ( cosAlpha) ; }
}
void bargraph_H_float( float v, uint16_t x0, uint16_t y0, uint16_t couleur) // [-1.0 .. +1.0]
{
// horizontal
TFT480.fillRect ( x0- 100 , y0, 200 , 3 , GRIS_TRES_FONCE) ;
borne_in( & v, - 1 , 1 ) ;
int16_t dx = ( int16_t ) ( 100 * v) ;
if ( dx < 0 ) { TFT480.fillRect ( x0+ dx, y0, - dx, 3 , couleur) ; }
if ( dx > 0 ) { TFT480.fillRect ( x0, y0, dx, 3 , couleur) ; }
}
void bargraph_V_float( float v, uint16_t x0, uint16_t y0, uint16_t couleur) // [-1.0 .. +1.0]
{
// vertical
TFT480.fillRect ( x0, y0- 100 , 3 , 200 , GRIS_TRES_FONCE) ;
borne_in( & v, - 1 , 1 ) ;
int16_t dy = ( int16_t ) ( 100 * v) ;
if ( dy < 0 ) { TFT480.fillRect ( x0, y0+ dy, 3 , - dy, couleur) ; }
if ( dy > 0 ) { TFT480.fillRect ( x0, y0, 3 , dy, couleur) ; }
}
void affi_indexH( uint16_t x, uint16_t y, int8_t sens, uint16_t couleur)
{
// petite pointe de flèche horizontale
// sens = +1 ou -1 pour orienter la pointe vers la droite ou vers la gauche
TFT480.fillTriangle ( x, y- 4 , x, y+ 4 , x+ 8 * sens, y, couleur) ;
}
void affi_indexV( uint16_t x, uint16_t y, int8_t sens, uint16_t couleur)
{
// petite pointe de flèche verticale
// sens = +1 ou -1 pour orienter la pointe vers le haut ou vers le bas
TFT480.fillTriangle ( x- 4 , y, x+ 4 , y, x, y+ 8 * sens, couleur) ;
}
void affi_int_en_binaire( uint8_t v, uint16_t x0,uint16_t y0)
{
TFT480.fillRect ( x0- 72 , y0, 80 , 12 , GRIS_FONCE) ; // efface le nombre précédemment affiché
char s1;
for ( int i= 0 ; i< 8 ; i++ )
{
if ( ( ( ( v >> i) & 1 ) ! = 0 ) == true ) { s1= '1' ; } else { s1= '0' ; }
TFT480.drawChar ( s1, x0- 10 * i, y0) ; // affiche de droite à gauche les bits 0..7
}
}
void affi_int_test( uint32_t v, uint16_t x0, uint8_t num, uint16_t txt_couleur, uint16_t back_couleur) // num = numéro de l'emplacement (en hauteur)
{
TFT480.setFreeFont ( FM9) ;
TFT480.setTextColor ( txt_couleur) ;
String s1= String( v) ;
TFT480.fillRect ( x0, 10 + 18 * num, 200 , 18 , back_couleur) ; //efface
TFT480.drawString ( s1, x0, 10 + 18 * num) ;
}
void affi_float_test( float v, uint16_t x0, uint8_t num, uint16_t txt_couleur, uint16_t back_couleur) // num = numéro de l'emplacement (en hauteur)
{
TFT480.setFreeFont ( FM9) ;
TFT480.setTextColor ( txt_couleur) ;
String s1= String( v, 6 ) ;
TFT480.fillRect ( x0, 10 + 18 * num, 200 , 18 , back_couleur) ; //efface
TFT480.drawString ( s1, x0, 10 + 18 * num) ;
}
void affi_string_test( String s, uint16_t x0, uint8_t num, uint16_t txt_couleur, uint16_t back_couleur) // num = numéro de l'emplacement (en hauteur)
{
TFT480.setFreeFont ( FM9) ;
TFT480.setTextColor ( txt_couleur) ;
TFT480.fillRect ( x0, 10 + 18 * num, 200 , 18 , back_couleur) ; //efface
TFT480.drawString ( s, x0, 10 + 18 * num) ;
}
#endif
IMPORTANT :
pas dupliquer physiquement ces fichiers dans les répertoires, au risque de se retrouver, lors de mises à jour, avec des versions différentes, source de bugs difficiles à débusquer. Le PFD et le ND doivent utiliser la même version de ces fichiers partagés.
5 Le principe
Le simulateur FlightGear Open-source, gratuit, (pour Linux) comprend outre un serveur html, des serveurs de protocoles série (telnet, mais aussi "générique" qui nous intéresse ici). Encore faut-il définir ce protocole générique précisément. Il faut pour cela créer un fichier xml et le placer dans le répertoire de "protocol" de FlightGear.
Sous linux ça donne ça :
J'ai recopié le contenu de ce fichier au bas du code source. Il comprend deux parties, "output" et "input".
Ce n'est pas tout : pour que le programme FG tienne compte de ce fichier, il faut le lancer avec les deux options suivantes (les 2 options sont indispensables afin d'obtenir un fonctionnement bidirectionnel):
--generic=serial,in,10,/dev/ttyUSB0,38400,hardware4
La vitesse de la liaison série (ici 38400 bauds) doit correspondre exactement à celle programmée dans l'ESP32, voir le code en C++
La partie "output" sert ici à publier, à destination de l'ESP :
l'altitude
la vitesse
le tangage
le roulis
le cap
la vitesse verticale
la fréquence inscrite dans le panel radio nav1 de l'avion (ex:11445 pour 114.45MHz)
la distance en nautiques de la balise (VOR-DME) correspondante
les données ILS (glide + localizer)
etc... (voir le code C++ ; j'en rajoute régulièrement !)
La partie "input" permet de régler à l'aide de deux encodeurs rotatifs pas à pas reliés à l'ESP, les consignes d'altitude et de cap du pilote automatique de FG.
(avant de décoller, on doit aller dans la fenêtre de paramétrage de l'autopilot avec la touche de fonction F11, et sélectionner HDG et ALT. ensuite après prise d'altitude minimale, on peut lancer l'autopilot avec par exemple un bouton de la manette de jeux...)
(voir le code C++ ; j'en rajoute aussi régulièrement !)
6 L'afficheur utilisé :
C'est un TFT LCD 480 x 320 que l'on pilote ici par son interface parallèle, d'où la très grande rapidité.
ATTENTION : il existe des afficheurs d'apparence identique sauf pour le tracé des pistes qui et différent : je n'ai pas réussi à les faire fonctionner. Donc il faut utiliser celui de la photo ci-dessus exclusivement.
30 juin 2021 :
En fait, après maintes expérimentations matérielles et logicielles, les afficheurs ne fonctionnent pas tous, il s'avère ceci :
ce n'est pas une question de tracé des pistes au dos des afficheurs
c'est en fait un problème de driver utilisé par l'afficheur
certains afficheurs fonctionnent avec la library TFT_eSPI
certains autres ne fonctionnent qu'avec la library MCUFRIEND_kbv dérivée de ADAFRUIT
certains fonctionnent avec tout
oui j'ai configuré le plan de câblage des pins correctement dans les fichiers concernés, la preuve en permutant
les afficheurs sur le même montage et avec le même programme et même config
tous les afficheurs fonctionnent sur Arduino Mega2560
Vu que les fonctions diffèrent entre les deux library, surtout concernant les polices de caractères disponibles, vu que j'ai tout développé avec la TFT_eSPI, vu que j'utilise une ESP32 et pas un Arduino, et vu que rien, visuellement, ne permet de discerner les types d'afficheurs, et surtout pas la sérigraphie au dos, je me retrouve une fois sur deux avec un afficheur inutilisable pour ce projet. Et là je viens de perdre une journée à galérer pour en arriver à cette conclusion.
7 Dans la jungle des afficheurs
10 juillet 2021 : User_Setup.h " situé dans le dossier "/home/login/Arduino/libraries/TFT_eSPI/" :
#define ESP32_PARALLEL
8 Utilité du panel ESP32
9 Evolution
28 mai 2021 :
Cette réalisation est en phase d'évolution, j'améliore chaque jour l'affichage et j'ajoute de nouvelles fonctions.
Actuellement nous avons :
horizon artificiel représentant à la fois le roulis et le tangage
à gauche : la vitesse /air (ici : 113 kts)
une règle verticale glissante graduée des vitesses (ici: 70..160)
une colonne colorée des vitesses particulières: mini, maxi...
L'altitude (ici: 1525 ft)
une règle verticale glissante graduée des altitudes (ici: 1480..1560)
à droite : L'indicateur analogique de la vitesse verticale (ici ~1200 ft/mn); Si l'aiguille arrive au taquet, la valeur (>3000) s'affiche numériquement au dessus (ou si < -3000, en dessous)
au centre en bas : le cap (ici: 228°) avec compas tournant.
en bas à gauche: la saisie de la consigne de cap pour le pilote auto ("HDG" ici 150°) réglable par encodeur pas à pas; Cette valeur est représenté sur le compas à sa position relative correcte (non visible ici).
en bas à droite: la saisie de la consigne d'altitude pour le pilote auto ("ALT" ici 30 => 3000ft en rose) réglable par encodeur pas à pas. Cette valeur est recopiée au dessus de l'échelle des altitudes
10 Circuit imprimé
4 juin 2021 :
11 Le boitier imprimé en 3D
12 Disposition des éléments sur le circuit imprimé
Sur la photo ci-contre :
L'afficheur, en bleu sombre au fond, tenu par les petites cales [A, B, C ,D] est vu de dos
Les pistes sont vues par transparence à travers le circuit imprimé en verre époxy très fin (0.8mm)
Le lecteur de carte SD (avec une carte dedans) se retrouve du même côté que le connecteur mini-usb d'alimentation de la carte ESP32
13 Captures d'écran sur SDcard
02 juin 2021 :
Grande nouvelle : J'ai réussi à :
utiliser le lecteur de micro SDcard (TFcard) situé au dos de l'afficheur
effectuer une capture de l'écran TFT
enregistrer cette capture dans un fichier .bmp sur la SDcard
La capture est déclenchée par appui sur le petit switch (voir schéma).
IMPORTANT : Un fichier image 480x320px format paysage, 24bits RGB888, nommé capture2.bmp doit être présent sur la SDcard, dans le dossier "bmp" au préalable, afin de fournir l'entête "qui va bien" (dans un premier temps j'ai codé la création de l'entête, ce qui n'est pas très compliqué, et puis voyant que c'est une trouvaille à la sauce Windows... j'ai laissé tomber) à la fonction de capture). J'en fournis une, vous pouvez aussi la créer (de couleur unie par exemple) avec The Gimp. La fonction de capture ne fait qu'écrire dans ce fichier à partir de la position (offset) 138; c'est à dire après la fin de l'entête. Pour plus de détails, voir la fonction
void write_TFT_on_SDcard()
Et voici ci-contre le résultat ; C'est quand même autre chose qu'une photo prise avec un APN ou un smartphone !
L'ensemble constitue maintenant un module universel puissant, avec affichage, capture d'écran très utile pour vous montrer sur le site les résultats, accès à de gros volumes de data, sans oublier les fonctions WiFi de l'ESP...
Un p'tit gif animé qui montre tout ce qui bouge :
14 Evolution 2
14 juin 2021 :
Je travaille sur l'acquisition des données 'ILS' en vue d'afficher les indicateurs permettant un atterrissage aux instruments. Il va falloir interpréter les data suivantes :
/instrumentation/nav[1]/frequencies/selected-mhz
/instrumentation/nav[1]/gs-distance
instrumentation/nav[1]/gs-direct-deg
Je peux déjà dire que l'exportation de ces données supplémentaires par FG ne le ralentit pas, nous verrons si côté ESP32 il n'y a pas d'indigestion. La suite devrait marcher comme sur des roulettes ;)
16 juin 2021 :
version 7.0 -> L'affichage de la fonction GLIDE de l'ILS est maintenant fonctionnel, par un double curseur se déplaçant de haut en bas sur les côté de l'horizon artificiel. Cela permet de descendre (manuellement) vers la piste avec un angle de 3° (= pente 5%) précis. Reste à traiter le "localizer" (azimut)
Voici ce que je conseille pour le Cessna Citation X :
approche avec une hauteur de 3000ft à 10 nautiques, afin de d'accrocher le faisceau
ralentir l'avion à 160 kts
stopper le pilote automatique
volets 2 crans (surtout pas sortis à fond !)
sortir le train afin de subir toutes les traînées et de stabiliser les paramètres sans risquer une surprise au dernier moment...
gérer TRÈS précisément la vitesse entre 140 et 160 kts (gaz)- moins vite on décroche, plus vite on avale toute la piste et on finit dans les champs
respecter la pente de descente à la profondeur.
toucher si possible en début de piste
éviter tout rebond
Si on ne dispose pas d'un palonnier ça devient vite Rock’n’roll !
15 l'ILS est fonctionnel
17 juin 2021 :
16 Affichage de l'orientation de la piste
21 juin 2021 :
17 Fonction Autoland (Atterrissage automatique)
27 juin 2021 : version 9.0
28 juin 2021 : version 9.1
18 Deuxième instrument : ND (Navigation Display)
3 juillet 2021 :
J'ai pensé que ce Primary Flight Display devait se sentir un peu seul... Aussi je vais lui offrir un petit frère : Un second écran TFT de même taille (3.5" - 320x480px) affichant les aides à la navigation : Le ND (Navigation Display):
etc...
L'étude est lancée, voici un aperçu ->
Je ne sais pas encore si je vais y consacrer un article distinct ou bien continuer sa description ici à la suite. Et comme je me connais, ça risque de déboucher à terme sur un tableau de bord complet !!
11 Juillet 2021 :
J'ai finalement choisi d'utiliser les fonctions WiFi des ESP32 pour assurer la communication entre les deux instruments et ça fonctionne très bien.
Actuellement le PFD transmet le cap au deuxième instrument, et la donnée est correctement reçue en temps réel. Donc le lien (1)->(2) est OK. Il me reste à coder le lien inverse (2)->(1) ce qui revient à faire une liaison WiFi client-serveur bidirectionnelle. Je vais m'y atteler ces jours-ci, et je pense que ça devrait fonctionner, je crains juste quelques difficultés dans la gestion du timing de l'ensemble (eh oui, les deux ESP ne font pas QUE cela, il gèrent aussi tous les affichages, assez complexes, en temps réel).
Je trouve donc que cette réalisation est très intéressante et si je la maîtrise bien c'est aussi parce que je ne suis pas avare de commentaires dans le code source.
Je publierai prochainement une version de l'ensemble, pour l'instant seul le PFD figure ici.
A suivre...
13 Juillet 2021 : 14 Juillet 2021 : Remarque : le schéma et le circuit imprimé sont (volontairement) identiques à ceux du PFD.
19 Vers un troisième instrument ?
19 juillet 2021 :
20 Code source de l'instrument ND (Navigateur Display)
CODE SOURCE en C++
//
// ==================================
String version= "36.4" ;
// ==================================
/*---------------------------------------------------------------------------------------
ND.ino - Navigation Display pour ESP32 - pour Afficheur TFT480 480x320
par Silicium628
Ce logiciel est libre et gratuit sous licence GNU GPL
Pour les #includes issus de l'univers Arduino (que je ne fournis pas), il faut voir au cas par cas.
(drivers d'affichage en particulier)
---------------------------------------------------------------------------------------
De petites images à placer sur la SDcard centrées sur les aérodromes proviennent de OpenStreetMap
OpenStreetMap® est un ensemble de données ouvertes,
disponibles sous la licence libre Open Data Commons Open Database License (ODbL)
accordée par la Fondation OpenStreetMap (OSMF).
Voir ce lien pour plus de détails :
https://www.openstreetmap.org/copyright
---------------------------------------------------------------------------------------
*/
/**
==========================================================================================================
CONCERNANT L'AFFICHAGE TFT : connexion :
( Pensez à configurer le fichier User_Setup.h de la bibliothèque ~/Arduino/libraries/TFT_eSPI/ )
les lignes qui suivent ne sont q'un commentaire pour vous indiquer la config à utiliser
placée ici, elle ne sont pas fonctionnelles
Il FAUT modifier le fichier User_Setup.h installé par le système Arduino dans ~/Arduino/libraries/TFT_eSPI/
// ESP32 pins used for the parallel interface TFT
#define TFT_CS 27 // Chip select control pin
#define TFT_DC 14 // Data Command control pin - must use a pin in the range 0-31
#define TFT_RST 26 // Reset pin
#define TFT_WR 12 // Write strobe control pin - must use a pin in the range 0-31
#define TFT_RD 13
#define TFT_D0 16 // Must use pins in the range 0-31 for the data bus
#define TFT_D1 4 // so a single register write sets/clears all bits
#define TFT_D2 2 // 23
#define TFT_D3 22
#define TFT_D4 21
#define TFT_D5 15 // 19
#define TFT_D6 25 // 18
#define TFT_D7 17
==========================================================================================================
**/
/*
Notes :
- ce Navigation Display reçoit toutes les données par WiFi, émises par l'ESP du PFD. Il n'est donc pas nécessaire de le connecter
sur un port USB, il peut être simplement alimenté par un adaptateur 5V, ou sur l'alim 5V du PFD (en amont du régulateur 3V3 )
si toutefois le port USB0 (et son câble) qui alimentent le PFD peuvent fournir suffisamment de courant.
*/
// le numéro de version doit être identique à celui du PFD (Primary Flight Display)
// affichage carte + zoom
// selection des carte par encodeur rotatif (ce qui met à jour les fréquences radio et les paramètres de la piste, et ILS)
// affiche avion sur la carte
// affiche faisceau ILS sur la carte
// affiche cercles 10 , 20, 40, 80, 160, 320NM sur la carte
// v14.0 les fichiers principaux ont été renommés par soucis de clarté
// v15.6 ajout de cartes .bmp (à copier sur la SDcard)
// v19.0 choix aérodrome dans une liste. Affichage d'une photo de l'aérodrome en plus de la carte
// todo : mieux centrer certaines cartes (j'ai ajouté une mire dans le .zip)
#include <stdint.h>
#include <TFT_eSPI.h> // Hardware-specific library
#include "Free_Fonts.h"
#include "FS.h"
#include "SD.h"
#include "SPI.h"
#include "ND.h"
#include "FG_data.h"
#include "Fonctions1.h"
#include <WiFi.h>
#include <HTTPClient.h> // nous nous connecterons en tant que client au serveur PFD.
// Remarque: les fonctions WiFi consomment 50% de la mémoire flash (de programme)
const char * ssid = "PFD_srv" ; // doit être identique à celui du serveur du PFD
const char * password = "72r4TsJ28" ; // doit être identique à celui du serveur du PFD
// addresse IP + chemins URL du PFD:
const char * srvName_hdg = "http://192.168.4.1/hdg" ;
const char * srvName_cap = "http://192.168.4.1/cap" ;
const char * srvName_ils_nm = "http://192.168.4.1/ILSnm" ;
const char * srvName_ils_actual = "http://192.168.4.1/ILSactual" ;
////const char* srvName_sw = "http://192.168.4.1/switch";
const char * srvName_latitude = "http://192.168.4.1/latitude" ;
const char * srvName_longitude = "http://192.168.4.1/longitude" ;
const char * srvName_hauteur = "http://192.168.4.1/hauteur" ;
const char * srvName_flags = "http://192.168.4.1/flags" ;
// données reçues par WiFi depuis le serveur du PFD
String recp_hdg; // heading bug - HDG = consigne de cap
String recp_cap; // cap actuel (orientation/Nord du nez de l'avion) - sens horaire
String recp_latitude;
String recp_longitude;
String recp_hauteur;
String recp_flags;
Led Led1;
Led Led2;
TFT_eSprite SPR_VOR = TFT_eSprite( & TFT480) ;
TFT_eSprite SPR_avion = TFT_eSprite( & TFT480) ; // le petit avion sur la carte
uint16_t memo_img[ 20 * 20 ] ;
TFT_eSprite SPR_E = TFT_eSprite( & SPR_VOR) ; // Déclare Sprite object "SPR_11" with pointer to "TFT480" object
TFT_eSprite SPR_N = TFT_eSprite( & SPR_VOR) ;
TFT_eSprite SPR_O = TFT_eSprite( & SPR_VOR) ;
TFT_eSprite SPR_S = TFT_eSprite( & SPR_VOR) ;
TFT_eSprite SPR_3 = TFT_eSprite( & SPR_VOR) ;
TFT_eSprite SPR_6 = TFT_eSprite( & SPR_VOR) ;
TFT_eSprite SPR_12 = TFT_eSprite( & SPR_VOR) ;
TFT_eSprite SPR_15 = TFT_eSprite( & SPR_VOR) ;
TFT_eSprite SPR_21 = TFT_eSprite( & SPR_VOR) ;
TFT_eSprite SPR_24 = TFT_eSprite( & SPR_VOR) ;
TFT_eSprite SPR_30 = TFT_eSprite( & SPR_VOR) ;
TFT_eSprite SPR_33 = TFT_eSprite( & SPR_VOR) ;
Cadre cadre_top1;
Cadre cadre_top1b;
Cadre cadre_top2;
Cadre cadre_00;
Cadre cadre_01;
Cadre cadre_10;
Cadre cadre_11;
Cadre cadre_20;
Cadre cadre_21;
Cadre cadre_cap1;
Cadre cadre_hdg1;
Cadre cadre_AZ_piste;
Cadre cadre_distance_piste;
Cadre cadre_bas1; // dans la partie droite
Cadre cadre_bas2;
Cadre cadre_position; // affiche la position de l'avion (Lat/Long WGS84)
Cadre cadre_info; // messages d'info au bas de la partie gauche
uint8_t saisir_ecran= 0 ;
int16_t num_bali= 9 ; // peut être négatif
uint32_t memo_micros = 0 ;
uint32_t temps_ecoule;
uint16_t nb_100ms= 0 ;
uint16_t nb_secondes= 0 ;
float cap;
float memo_cap;
int16_t hdg1 = 150 ; // consigne cap
int16_t memo1_hdg1; // pour le changement manuel
int16_t memo2_hdg1; // pour l'autoland
uint8_t SDcardOk= 0 ;
uint8_t gs_ok;
uint8_t refresh_ND = 1 ;
uint8_t refresh_Encoche = 1 ;
uint8_t refresh_carte = 1 ;
// les deux valeurs suivantes sont chosies pour afficher LFMT au lancement du programme. On peut choisir autre chose...
uint16_t decal= 6 ; // pour la liste des aérodromes
uint16_t num_ligne = 14 ; // pour la liste des aérodromes
float longueur_piste;
float orient_piste;
float lat_centre_pst;
float lon_centre_pst;
uint16_t x_avion; // position (en px) du petit avion qui se déplace sur la carte
uint16_t y_avion;
uint16_t memo_x_avion;
uint16_t memo_y_avion;
float lon_avion;
float lat_avion;
float hauteur_AAL;
float GPS_distance_piste; // en NM
float GPS_azimut_piste;
uint16_t memo_flags; // servira à détecter et agir rapidement lors de la modif de la valeur
int8_t zoom; // pour la carte; = numéro de la carte .bmp
int8_t memo_zoom;
float px_par_km;
float px_par_NM;
float plan_ref_x; // centre de la piste
float plan_ref_y;
float plan_echelle;
uint16_t SW0= 1 ;
const int GPIO_SW0 = 36 ;
bool SW0_etat;
bool memo_SW0_etat;
uint16_t bouton0= 1 ; // bouton poussoir smd
const int GPIO_bouton0 = 34 ;
bool bouton0_etat;
bool memo_bouton0_etat;
uint16_t bouton1= 2 ; // bouton poussoir smd
const int GPIO_bouton1 = 35 ;
bool bouton1_etat;
bool memo_bouton1_etat;
uint16_t bouton2= 4 ; // bouton poussoir smd
const int GPIO_bouton2 = 32 ;
bool bouton2_etat;
bool memo_bouton2_etat;
uint16_t bouton3= 8 ; // bouton poussoir smd
const int GPIO_bouton3 = 33 ;
bool bouton3_etat;
bool memo_bouton3_etat;
// encodeurs rotatif pas à pas
/* remplacé par 2 boutons poussoirs
const int rot1a = 32; // GPIO32 -> câbler une R au +3V3
const int rot1b = 33; // GPIO33 -> câbler une R au +3V3
/* remplacé par 2 boutons poussoirs
const int rot2a = 35; // GPIO35 -> câbler une R au +3V3
const int rot2b = 34; // GPIO34 -> câbler une R au +3V3
*/
//const int led1 = 25; // GPIO15
#define TEMPO 20 // tempo anti-rebond pour l'acquisition des encodeurs rotatifs
volatile uint32_t timer1 = 0 ;
volatile uint32_t timer2 = 0 ;
uint16_t compteur1;
uint8_t premier_passage= 1 ;
uint8_t zoom_auto= 0 ;
uint32_t bmp_offset = 0 ;
String switches= "null" ; // boutons connectés au 3eme ESP32, reçus par WiFi
#define MODE_ND 0
#define MODE_LISTE 1
#define MODE_PLAN 2
#define MODE_CARTE_FR 3
uint8_t mode_affi= MODE_LISTE;
void RAZ_variables( )
{
hdg1= 0 ; // consigne cap
}
void httpGetHDG( )
{
String s1;
String s2;
HTTPClient http;
char c1[ 4 ] ;
s1= "?a1=" ; // a1 (nom arbitraire..) pour désigner l'argument envoyé dans l'URL de la requête vers le serveur (le PFD)
s1+= num_bali;
s1+= "&swND=" ; // swND pour désigner l'argument envoyé dans l'URL de la requête
s2= switches;
s1+= s2;
http.begin ( srvName_hdg+ s1) ; // rappel : srvName_hdg = "http://192.168.4.1/switch"
int httpResponseCode = http.GET ( ) ;
if ( httpResponseCode> 0 ) { recp_hdg = http.getString ( ) ; }
http.end ( ) ;
}
void httpGetCap( )
{
HTTPClient http;
http.begin ( srvName_cap) ;
int httpResponseCode = http.GET ( ) ;
if ( httpResponseCode> 0 ) { recp_cap = http.getString ( ) ; }
http.end ( ) ;
}
void httpGetLatitude( ) // Latitude de l'avion
{
HTTPClient http;
http.begin ( srvName_latitude) ;
int httpResponseCode = http.GET ( ) ;
if ( httpResponseCode> 0 ) { recp_latitude = http.getString ( ) ; }
http.end ( ) ;
}
void httpGetLongitude( ) // Longitude de l'avion
{
HTTPClient http;
http.begin ( srvName_longitude) ;
int httpResponseCode = http.GET ( ) ;
if ( httpResponseCode> 0 ) { recp_longitude = http.getString ( ) ; }
http.end ( ) ;
}
void httpGetHauteur( ) // Hauteur de l'avion / sol
{
HTTPClient http;
http.begin ( srvName_hauteur) ;
int httpResponseCode = http.GET ( ) ;
if ( httpResponseCode> 0 ) { recp_hauteur = http.getString ( ) ; }
http.end ( ) ;
}
void httpGetParams( )
{
HTTPClient http;
http.begin ( srvName_flags) ;
int httpResponseCode = http.GET ( ) ;
if ( httpResponseCode> 0 ) { recp_flags = http.getString ( ) ; }
http.end ( ) ;
}
////void httpGet_SW() // depuis le SW: c.a.d l'ESP32 n°3
////{
////HTTPClient http;
////http.begin(srvName_sw);
////int httpResponseCode = http.GET();
////if (httpResponseCode>0) { switches = http.getString(); }
////http.end();
////}
/** ***********************************************************************************
IMAGE.bmp
***************************************************************************************/
/**
Rappel et décryptage de la fonction Color_To_565 : (elle se trouve dans le fichier LCDWIKI_KBV.cpp)
//Pass 8-bit (each) R,G,B, get back 16-bit packed color
uint16_t Color_To_565(uint8_t r, uint8_t g, uint8_t b)
{
return ((r & 0xF8) << 8) | ((g & 0xFC) << 3) | ((b & 0xF8) >> 3);
}
0xF8 = 11111000
0xFC = 11111100
(r & 0xF8) -> 5 bit de gauche de r (on ignore donc les 3 bits de poids faible)
(g & 0xFC) -> 6 bit de gauche de g (on ignore donc les 2 bits de poids faible)
(b & 0xF8) -> 5 bit de gauche de b (on ignore donc les 3 bits de poids faible)
rrrrr---
gggggg--
bbbbb---
après les décalages on obtient les 16 bits suivants:
rrrrr---========
gggggg--===
===bbbbb
soit après le ou :
rrrrrggggggbbbbb
calcul de la Fonction inverse :
RGB565_to_888
**/
uint16_t Color_To_565( uint8_t r, uint8_t g, uint8_t b)
{
return ( ( r & 0xF8 ) << 8 ) | ( ( g & 0xFC ) << 3 ) | ( ( b & 0xF8 ) >> 3 ) ;
}
void RGB565_to_888( uint16_t color565, uint8_t * R, uint8_t * G, uint8_t * B)
{
* R= ( color565 & 0xFFFFF800 ) >> 8 ;
* G= ( color565 & 0x7E0 ) >> 3 ;
* B= ( color565 & 0x1F ) << 3 ;
}
uint16_t bmp_width;
uint16_t bmp_heigh;
uint16_t read_16( File fp)
{
uint8_t low;
uint16_t high;
low = fp.read ( ) ;
high = fp.read ( ) ;
return ( high<< 8 ) | low;
}
uint32_t read_32( File fp)
{
uint16_t low;
uint32_t high;
low = read_16( fp) ;
high = read_16( fp) ;
return ( high<< 8 ) | low;
}
void write_16( uint16_t v16, File fp)
{
uint8_t low, high;
low = v16 & 0xFF ;
high= v16 >> 8 ;
fp.write ( low) ;
fp.write ( high) ;
}
void write_32( uint32_t v32, File fp)
{
uint16_t low, high;
low = v32 & 0xFFFF ;
high= v32 >> 16 ;
write_16( low, fp) ;
write_16( high, fp) ;
}
bool teste_bmp_header( File fp)
{
if ( read_16( fp) ! = 0x4D42 ) { return false ; } // (2 bytes) The header field used to identify the BMP
read_32( fp) ; // (4 bytes) get bmp size (nombre total d'octets)
read_32( fp) ; // (4 bytes) get creator information
bmp_offset = read_32( fp) ; // (4 bytes) get offset information
read_32( fp) ; //get DIB information
// ici on a lu 16 octets
bmp_width = read_32( fp) ; //(4 bytes) get width and heigh information
bmp_heigh = read_32( fp) ; //(4 bytes)
// ici on a lu 24 octets
//if(read_16(fp)!= 1) {return false;}
read_16( fp) ;
//if(read_32(fp)!= 0) {return false;}
return true ;
}
uint8_t LumCtr( uint8_t vi, float lum, float ctr)
{
float v2;
uint8_t result;
v2 = ( ( float ) vi - lum) * ctr;
if ( v2< 0 ) { v2= 0 ; }
if ( v2> 255 ) { v2= 255 ; }
result = ( uint8_t ) v2;
return result;
}
void draw_bmp( uint16_t x0, uint16_t y0, uint8_t rot, float lum, float contraste, File* fp)
{
//sram = freeRam(); Serial.print("03-freeRam="); Serial.println(sram);
uint16_t i,j,k,p,m= 0 ;
uint16_t y1;
uint8_t bmp_data[ 2 * 3 ] = { 0 } ;
uint16_t bmp_color[ 2 ] ;
fp- > seek( bmp_offset) ;
for ( i= 0 ; i< bmp_heigh; i++ )
{
for ( j= 0 ; j< ( bmp_width/ 2 ) ; j++ )
{
m= 0 ;
fp- > read( bmp_data,2 * 3 ) ;
for ( k= 0 ; k< 2 ; k++ )
{
bmp_color[ k] = Color_To_565( LumCtr( bmp_data[ m+ 2 ] ,lum, contraste) , LumCtr( bmp_data[ m+ 1 ] ,lum, contraste) , LumCtr( bmp_data[ m+ 0 ] ,lum, contraste) ) ;
m+= 3 ;
}
for ( p= 0 ; p< 2 ; p++ )
{
if ( rot== 0 )
{
y1= y0;
TFT480.drawPixel ( x0+ i, y0+ j* 2 + p, bmp_color[ p] ) ;
}
if ( rot== 1 )
{
y1= 160 - y0;
TFT480.drawPixel ( x0+ j* 2 + p,320 - ( y1+ i) , bmp_color[ p] ) ;
}
}
}
}
}
void affi_img( uint16_t x0, uint16_t y0, float lum, float contraste, const char * filename1)
{
File bmp_file;
TFT480.setFreeFont ( FF1) ;
TFT480.setTextColor ( ORANGE, NOIR) ;
bmp_file = SD.open ( filename1) ;
if ( ! bmp_file)
{
bmp_file.close ( ) ;
return ;
}
if ( ! teste_bmp_header( bmp_file) )
{
bmp_file.close ( ) ;
return ;
}
draw_bmp( x0, y0, 1 , lum, contraste, & bmp_file) ;
bmp_file.close ( ) ;
// delay(1000);
}
/** -----------------------------------------------------------------------------------
CAPTURE D'ECRAN vers SDcard
/** ----------------------------------------------------------------------------------- */
void write_TFT480_on_SDcard( ) // enregistre le fichier .bmp
{
if ( SDcardOk== 1 )
{
////TFT480.drawString("capture bmp !", 100, 100);
////delay(1000);
String s1;
uint16_t ys= 200 ;
TFT480.setFreeFont ( FF1) ;
TFT480.setTextColor ( JAUNE, NOIR) ;
uint16_t x, y;
uint16_t color565;
uint16_t bmp_color;
uint8_t R, G, B;
if ( ! SD.exists ( "/bmp/capture2.bmp" ) )
{
TFT480.fillRect ( 0 , 0 , 480 , 320 , NOIR) ; // efface
TFT480.setTextColor ( ROUGE, NOIR) ;
TFT480.drawString ( "NO /bmp/capture2.bmp !" , 100 , ys) ;
delay( 300 ) ;
TFT480.fillRect ( 100 , ys, 220 , 20 , NOIR) ; // efface
return ;
}
File File1 = SD.open ( "/bmp/capture2.bmp" , FILE_WRITE) ; // ouverture du fichier binaire (vierge) en écriture
if ( File1)
{
/*
Les images en couleurs réelles BMP888 utilisent 24 bits par pixel:
Il faut 3 octets pour coder chaque pixel, en respectant l'ordre de l'alternance bleu, vert et rouge.
*/
uint16_t bmp_offset = 138 ;
File1.seek ( bmp_offset) ;
TFT480.setTextColor ( VERT, NOIR) ;
for ( y= 320 ; y> 0 ; y-- )
{
for ( x= 0 ; x< 480 ; x++ )
{
color565= TFT480.readPixel ( x, y) ;
RGB565_to_888( color565, & R, & G, & B) ;
File1.write ( B) ; //G
File1.write ( G) ; //R
File1.write ( R) ; //B
}
s1= ( String) ( y/ 10 ) ;
TFT480.fillRect ( 2 , 300 , 20 , 20 , NOIR) ;
TFT480.drawString ( s1, 2 , 300 ) ; // affi compte à rebour
}
File1.close ( ) ; // referme le fichier
TFT480.fillRect ( 2 , 300 , 20 , 20 , NOIR) ; // efface le compte à rebour
}
}
}
/** ----------------------------------------------------------------------------------- */
void Draw_arc_elliptique( uint16_t x0, uint16_t y0, int16_t dx, int16_t dy, float angle1, float angle2, uint16_t couleur)
{
/*
REMARQUES :
-cette fonction permet également de dessiner un arc de cercle (si dx=dy), voire le cercle complet
- dx et dy sont du type int (et pas uint) et peuvent êtres négafifs, ou nuls.
-alpha1 et alpha2 sont les angles (en radians) des caps des extrémités de l'arc
*/
// angle1 et angle2 en degrés décimaux
float alpha1 = angle1/ 57.3 ; // (57.3 ~ 180/pi)
float alpha2 = angle2/ 57.3 ;
uint16_t n;
float i;
float x,y;
i= alpha1;
while ( i< alpha2)
{
x= x0+ dx* cos ( i) ;
y= y0+ dy* cos ( i+ M_PI/ 2.0 ) ;
TFT480.drawPixel ( x,y, couleur) ;
i+= 0.01 ; // radians
}
}
void affi_rayon1( uint16_t x0, uint16_t y0, uint16_t rayon, float angle_i, float pourcent, uint16_t couleur_i, bool gras)
{
// trace une portion de rayon de cercle depuis 100%...à pourcent du rayon du cercle
// angle_i en degrés décimaux - sens trigo
float angle = angle_i/ 57.3 ; // (57.3 ~ 180/pi)
float x1, x2;
float y1, y2;
x1= x0+ rayon* cos ( angle) ;
y1= y0- rayon* sin ( angle) ;
x2= x0+ pourcent* rayon* cos ( angle) ;
y2= y0- pourcent* rayon* sin ( angle) ;
TFT480.drawLine ( x1, y1, x2, y2, couleur_i) ;
/*
if (gras)
{
TFT480.drawLine(x1, y1-1, x2, y2-1, couleur_i);
TFT480.drawLine(x1, y1+1, x2, y2+1, couleur_i);
}
*/
}
void affi_rayon2( uint16_t x0, uint16_t y0, float r1, float r2, float angle_i, uint16_t couleur_i, uint8_t gras)
{
// trace une portion de rayon de cercle entre les distances r1 et r2 du centre
// angle_i en degrés décimaux - sens trigo (= anti-horaire)
// origine d'angle -> trigo (à droite)
float angle = angle_i/ 57.3 ; // (57.3 ~ 180/pi)
int16_t x1, x2;
int16_t y1, y2;
x1= x0+ int16_t ( r1* cos ( angle) ) ;
y1= y0- int16_t ( r1* sin ( angle) ) ;
x2= x0+ int16_t ( r2* cos ( angle) ) ;
y2= y0- int16_t ( r2* sin ( angle) ) ;
//en fait si les extrémités dépassent de la taille de l'afficheur, ça se passe bien !
//if ((x1>0) && (x2>0) && (y1>0) && (y2>0) && (x1<480) && (x2<480) && (y1<320) && (y2<320) )
{
TFT480.drawLine ( x1, y1, x2, y2, couleur_i) ;
if ( gras== 1 )
{
TFT480.drawLine ( x1, y1- 1 , x2, y2- 1 , couleur_i) ;
TFT480.drawLine ( x1, y1+ 1 , x2, y2+ 1 , couleur_i) ;
}
}
}
void affi_char_r_alpha( uint16_t x0, uint16_t y0, float r1, float angle_i, char c1, uint16_t couleur_i)
{
// affiche un caractère à un emplacement situé à une distance r1 du centre et à la distance r1
// angle_i en degrés décimaux - sens trigo (= anti-horaire)
// origine d'angle -> trigo (à droite)
float angle = angle_i/ 57.3 ; // (57.3 ~ 180/pi)
int16_t x1;
int16_t y1;
x1= x0+ int16_t ( r1* cos ( angle) ) ;
y1= y0- int16_t ( r1* sin ( angle) ) ;
TFT480.setFreeFont ( FF1) ;
TFT480.setTextColor ( couleur_i, BLANC) ;
String s1 = String( c1) ;
TFT480.drawString ( s1, x1- 4 , y1- 4 ) ;
}
void affi_SPR_rayon2( uint16_t x0, uint16_t y0, float r1, float r2, float angle_i, uint16_t couleur_i, bool gras)
{
// trace une portion de rayon de cercle entre les distances r1 et r2 du centre
// angle_i en degrés décimaux - sens trigo
float angle = angle_i/ 57.3 ; // (57.3 ~ 180/pi)
int16_t x1, x2;
int16_t y1, y2;
x1= x0+ int16_t ( r1* cos ( angle) ) ;
y1= y0- int16_t ( r1* sin ( angle) ) ;
x2= x0+ int16_t ( r2* cos ( angle) ) ;
y2= y0- int16_t ( r2* sin ( angle) ) ;
if ( ( x1> 0 ) && ( x2> 0 ) && ( y1> 0 ) && ( y2> 0 ) && ( x1< 480 ) && ( x2< 480 ) && ( y1< 320 ) && ( y2< 320 ) )
{
SPR_VOR.drawLine ( x1, y1, x2, y2, couleur_i) ;
if ( gras)
{
SPR_VOR.drawLine ( x1, y1- 1 , x2, y2- 1 , couleur_i) ;
SPR_VOR.drawLine ( x1, y1+ 1 , x2, y2+ 1 , couleur_i) ;
}
}
}
void affi_tiret_H( uint16_t x0, uint16_t y0, uint16_t r, float angle_i, uint16_t couleur_i)
{
// trace un tiret perpendiculaire à un rayon de cercle de rayon r
// angle_i en degrés décimaux - sens trigo
float angle = angle_i/ 57.3 ; // (57.3 ~ 180/pi)
float x1, x2;
float y1, y2;
x1= x0+ ( r) * cos ( angle- 1 ) ;
y1= y0- ( r) * sin ( angle- 1 ) ;
x2= x0+ ( r) * cos ( angle+ 1 ) ;
y2= y0- ( r) * sin ( angle+ 1 ) ;
TFT480.drawLine ( x1, y1, x2, y2, couleur_i) ;
}
void affi_pointe( uint16_t x0, uint16_t y0, uint16_t r, float angle_i, uint16_t couleur_i)
{
// trace une pointe de flèche sur un cercle de rayon r
// angle_i en degrés décimaux - sens trigo
float angle = angle_i / 57.3 ; // (57.3 ~ 180/pi)
int16_t x1, x2, x3;
int16_t y1, y2, y3;
x1= x0+ r* cos ( angle) ; // pointe
y1= y0- r* sin ( angle) ; // pointe
x2= x0+ ( r- 7 ) * cos ( angle- 0.1 ) ; // base A
y2= y0- ( r- 7 ) * sin ( angle- 0.1 ) ; // base A
x3= x0+ ( r- 7 ) * cos ( angle+ 0.1 ) ; // base B
y3= y0- ( r- 7 ) * sin ( angle+ 0.1 ) ; // base B
TFT480.fillTriangle ( x1, y1, x2, y2, x3, y3, couleur_i) ;
}
void affi_SPR_encoche( uint16_t x0, uint16_t y0, uint16_t r, float angle_i, uint16_t couleur_i)
{
// trace une encoche (deux 'demi'-triangles) sur un cercle de rayon r
// angle_i en degrés décimaux - sens trigo
float angle = angle_i / 57.3 ; // (57.3 ~ 180/pi)
int16_t x1, x2, x3;
int16_t y1, y2, y3;
// partie gauche
x1= x0+ r* cos ( angle+ 0.08 ) ; // pointe
y1= y0- r* sin ( angle+ 0.08 ) ; // pointe
x2= x0+ ( r- 10 ) * cos ( angle+ 0.08 ) ; // base A
y2= y0- ( r- 10 ) * sin ( angle+ 0.08 ) ; // base A
x3= x0+ ( r- 10 ) * cos ( angle) ; // base B
y3= y0- ( r- 10 ) * sin ( angle) ; // base B
SPR_VOR.fillTriangle ( x1, y1, x2, y2, x3, y3, couleur_i) ;
// partie droite
x1= x0+ r* cos ( angle- 0.08 ) ; // pointe
y1= y0- r* sin ( angle- 0.08 ) ; // pointe
x2= x0+ ( r- 10 ) * cos ( angle- 0.08 ) ; // base A
y2= y0- ( r- 10 ) * sin ( angle- 0.08 ) ; // base A
x3= x0+ ( r- 10 ) * cos ( angle) ; // base B
y3= y0- ( r- 10 ) * sin ( angle) ; // base B
SPR_VOR.fillTriangle ( x1, y1, x2, y2, x3, y3, couleur_i) ;
}
void affi_rectangle_incline( uint16_t x0, uint16_t y0, uint16_t r, float angle_i, uint16_t couleur_i)
{
//rectangle inscrit dans le cerce de rayon r
// angle_i en degrés décimaux - sens trigo
float angle = ( angle_i- 3.5 ) / 57.3 ;
int16_t x1, x2, x3, x4;
int16_t y1, y2, y3, y4;
float d_alpha= 0.05 ; // détermine la largeur du rectangle
// point 1
x1= x0+ r* cos ( angle- d_alpha) ;
y1= y0+ r* sin ( angle- d_alpha) ;
// point 2
x2= x0+ r* cos ( angle+ d_alpha) ;
y2= y0+ r* sin ( angle+ d_alpha) ;
// point 3
x3= x0+ r* cos ( M_PI + angle- d_alpha) ;
y3= y0+ r* sin ( M_PI + angle- d_alpha) ;
// point 4
x4= x0+ r* cos ( M_PI + angle+ d_alpha) ;
y4= y0+ r* sin ( M_PI + angle+ d_alpha) ;
TFT480.drawLine ( x1, y1, x2, y2, couleur_i) ;
TFT480.drawLine ( x2, y2, x3, y3, couleur_i) ;
TFT480.drawLine ( x3, y3, x4, y4, couleur_i) ;
TFT480.drawLine ( x4, y4, x1, y1, couleur_i) ;
}
float degTOrad( float angle)
{
return ( angle * M_PI / 180.0 ) ;
}
void affi_dst_piste( ) // distance GPS
{
if ( mode_affi == MODE_PLAN) { return ; }
//TFT480.setTextFont(2);
cadre_distance_piste.efface ( ) ;
int nb_decimales = 2 ;
if ( GPS_distance_piste>= 10 ) { nb_decimales= 1 ; }
if ( GPS_distance_piste>= 100 ) { nb_decimales= 0 ; }
cadre_distance_piste.affiche_float ( GPS_distance_piste, nb_decimales) ;
//TFT480.setTextFont(1);
//TFT480.setTextColor(BLANC);
//TFT480.drawString("GPS", cadre_distance_piste.x0, cadre_distance_piste.y0-15);
TFT480.setTextFont ( 1 ) ;
TFT480.setTextColor ( VERT) ;
TFT480.drawString ( "NM" , cadre_distance_piste.x0 + 60 , cadre_distance_piste.y0 + 12 ) ;
// ZOOM AUTO
if ( read_bit( flags, bit_autoland) == 1 ) // c.a.d si le mode autoland de l'ESP32 PFD est engagé
// ce qui évite le déclenchement de cet automatisme au décollage !
{
memo_zoom= zoom;
if ( ( GPS_distance_piste < 16.0 ) && ( zoom> 5 ) ) { zoom= 5 ; }
if ( ( GPS_distance_piste < 8.0 ) && ( zoom> 4 ) ) { zoom= 4 ; }
if ( ( GPS_distance_piste < 4.0 ) && ( zoom> 3 ) ) { zoom= 3 ; }
if ( ( GPS_distance_piste < 2.0 ) && ( zoom> 2 ) ) { zoom= 2 ; }
if ( ( GPS_distance_piste < 1.0 ) && ( zoom> 1 ) ) { zoom= 1 ; }
if ( ( GPS_distance_piste < 0.5 ) && ( zoom> 0 ) ) { zoom= 0 ; }
if ( zoom! = memo_zoom)
{
affi_carte_locale( 235 ,0 ,1 ) ;
affi_ND( cap) ;
}
////if((GPS_distance_piste <0.5) && (hauteur_AAL<10.0))
////{
////mode_affi=MODE_PLAN;
////init_sprite_avion(ROUGE);
////affi_plan_aerodrome();
////}
}
}
void affi_direction_piste( ) // direction de la piste vue de l'avion (affiche au dessus du grand cercle)
{
if ( mode_affi == MODE_PLAN) { return ; }
String s;
uint16_t x0= 133 ;
uint16_t y0= 270 ;
int16_t alpha1 = GPS_azimut_piste;
cadre_AZ_piste.efface ( ) ;
cadre_AZ_piste.affiche_int ( alpha1,' ' ) ;
TFT480.drawCircle ( 215 , 5 , 2 , BLANC) ; // caractère 'degré'
}
void affi_dst_GPS( ) //distance de la piste vue de l'avion
{
if ( mode_affi == MODE_PLAN) { return ; }
String s1;
uint16_t x0= 70 ;
uint16_t y0= 250 ;
TFT480.setFreeFont ( FM9) ;
TFT480.setTextColor ( JAUNE, NOIR) ;
TFT480.drawString ( "RWY" , x0- 45 , y0) ;
TFT480.setTextColor ( BLANC, NOIR) ;
int nb_decimales;
if ( GPS_distance_piste> 99 ) { nb_decimales = 0 ; } else { nb_decimales = 1 ; }
s1 = String( GPS_distance_piste, nb_decimales) ;
if ( GPS_distance_piste > 2000 ) { s1= " --" ; }
TFT480.fillRect ( x0, y0, 52 , 18 , NOIR) ; // efface
TFT480.setFreeFont ( FM9) ;
TFT480.drawString ( s1, x0, y0) ;
TFT480.drawRoundRect ( x0, y0- 2 , 50 , 18 , 5 , GRIS_FONCE) ; // encadrement de la valeur affichée
TFT480.setTextColor ( JAUNE, NOIR) ;
TFT480.drawString ( "NM" , x0+ 55 , y0) ;
}
void init_SDcard( )
{
uint16_t y= 0 ;
TFT480.setTextColor ( VERT, NOIR) ;
TFT480.drawString ( "Init SDcard" , 0 , y) ;
y+= 20 ;
if ( ! SD.begin ( ) )
{
TFT480.drawString ( "Card Mount Failed" , 0 , y) ;
delay ( 2000 ) ;
TFT480.fillRect ( 0 , 0 , 480 , 320 , NOIR) ; // efface
return ;
}
uint8_t cardType = SD.cardType ( ) ;
if ( cardType == CARD_NONE)
{
TFT480.drawString ( "No SDcard" , 0 , y) ;
delay ( 2000 ) ;
TFT480.fillRect ( 0 , 0 , 480 , 320 , NOIR) ; // efface
return ;
}
SDcardOk= 1 ;
TFT480.drawString ( "SDcard Type: " , 0 , y) ;
if ( cardType == CARD_SD) { TFT480.drawString ( "SDSC" , 150 , y) ; }
else if ( cardType == CARD_SDHC) { TFT480.drawString ( "SDHC" , 150 , y) ; }
y+= 20 ;
uint32_t cardSize = SD.cardSize ( ) / ( 1024 * 1024 ) ;
String s1= ( String) cardSize + " GB" ;
TFT480.drawString ( "SDcard size: " , 0 , y) ;
TFT480.drawString ( s1, 150 , y) ;
//Serial.printf("Total space: %lluMB\n", SD.totalBytes() / (1024 * 1024));
//Serial.printf("Used space: %lluMB\n", SD.usedBytes() / (1024 * 1024));
delay ( 500 ) ;
TFT480.fillRect ( 0 , 0 , 480 , 320 , NOIR) ; // efface
}
void dessine_avion( uint16_t x, uint16_t y) // celui, fixe, au centre du grand cercle
{
TFT480.drawRoundRect ( x+ 2 , y- 6 , 6 , 25 , 2 , BLANC) ; // fuselage
TFT480.drawRoundRect ( x- 10 , y- 1 , 32 , 8 , 2 , BLANC) ; // aile
TFT480.drawRoundRect ( x- 2 , y+ 17 , 15 , 6 , 2 , BLANC) ; // stab
TFT480.fillRoundRect ( x+ 3 , y- 5 , 8 , 23 , 2 , BLEU) ; // fuselage
TFT480.fillRoundRect ( x- 9 , y, 30 , 6 , 2 , BLEU) ; // aile
TFT480.fillRoundRect ( x- 1 , y+ 18 , 13 , 4 , 2 , BLEU) ; // stab
}
void dessine_point_sur_carte( float lat_i, float long_i, int16_t couleur)
{
// calcul de la position du point/ piste
float distance_piste = distance_AB( lat_i, long_i, lat_centre_pst, lon_centre_pst) / 1.852 ; //du centre de la piste, en NM
float azimut_piste = azimut_AB( lat_i, long_i, lat_centre_pst, lon_centre_pst) ; // latitudes et longitudes en degrés décimaux
float dx = distance_piste * cos ( raddeg * ( azimut_piste - 90.0 ) ) ;
float dy = distance_piste * sin ( raddeg * ( azimut_piste - 90.0 ) ) ;
//if(GPS_distance_piste < 1.0){mode_affi = MODE_PLAN;}
int32_t dx_px = ( dx * px_par_NM) ;
int32_t dy_px = ( dy * px_par_NM) ;
int16_t x_pt = 357 - dx_px;
int16_t y_pt = 75 - dy_px;
if ( ( x_pt > 245 ) && ( y_pt > 10 ) && ( y_pt < 170 ) )
{
TFT480.fillCircle ( x_pt, y_pt+ 2 , 2 , couleur) ;
//TFT480.drawPixel(x_pt, y_pt, couleur);
}
}
void affi_avion_sur_carte( float alpha) // dessine le sprite du petit sur la carte, mobile, avec l'orientation alpha
{
//TFT480.drawRect(x-5, y-3, 15, 12, NOIR); // pour test visu délimitation de la zone
if ( ( x_avion ! = 0 ) && ( memo_x_avion ! = 0 ) && ( y_avion ! = 0 ) && ( memo_y_avion ! = 0 ) )
{
TFT480.pushRect ( memo_x_avion- 10 , memo_y_avion- 10 , 20 , 20 , memo_img) ; // print (petit) fond de carte
}
if ( ( x_avion > 245 ) && ( y_avion > 10 ) && ( y_avion < 170 ) )
{
TFT480.readRect ( x_avion- 10 , y_avion- 10 , 20 , 20 , memo_img) ; // enregistre en mémoire RAM
//affiche le sprite de l'avion avec la bonne orientation
TFT480.setPivot ( x_avion, y_avion) ;
SPR_avion.pushRotated ( alpha, TFT_BLACK) ; // noir définit comme transparent
memo_x_avion = x_avion;
memo_y_avion = y_avion;
}
}
void affi_avion_sur_plan( float alpha) // dessine le sprite du petit sur le plan des pistes, mobile, avec l'orientation alpha
{
//TFT480.drawRect(x-5, y-3, 15, 12, NOIR); // pour test visu délimitation de la zone
if ( memo_x_avion ! = 0 )
{
TFT480.pushRect ( memo_x_avion- 10 , memo_y_avion- 10 , 20 , 20 , memo_img) ; // print (petit) fond de carte
}
if ( ( x_avion > 10 ) && ( y_avion > 10 ) && ( y_avion < 350 ) )
{
TFT480.readRect ( x_avion- 10 , y_avion- 10 , 20 , 20 , memo_img) ; // enregistre en mémoire RAM
//affiche le sprite de l'avion avec la bonne orientation
TFT480.setPivot ( x_avion, y_avion) ;
SPR_avion.pushRotated ( alpha, TFT_BLACK) ; // noir définit comme transparent
memo_x_avion = x_avion;
memo_y_avion = y_avion;
}
}
void calculs_GPS( )
{
float lat_A = liste_bali[ num_bali] .lat_A ;
float lon_A = liste_bali[ num_bali] .lon_A ;
float lat_B = liste_bali[ num_bali] .lat_B ;
float lon_B = liste_bali[ num_bali] .lon_B ;
longueur_piste = 1000.0 * distance_AB( lat_A, lon_A, lat_B, lon_B) ; // en m
orient_piste = azimut_AB( lat_A, lon_A, lat_B, lon_B) ; // en degrés
lat_centre_pst= ( lat_A + lat_B) / 2.0 ;
lon_centre_pst= ( lon_A + lon_B) / 2.0 ;
// DISTANCE (variable globale)
// voir la fonction "distance_AB()" dans le fichier "Fonctions1.h"
GPS_distance_piste = distance_AB( lat_avion, lon_avion, lat_centre_pst, lon_centre_pst) / 1.852 ; // du centre de la piste, en NM
// DIRECTION (variable globale)
GPS_azimut_piste = azimut_AB( lat_avion, lon_avion, lat_centre_pst, lon_centre_pst) ; // latitudes et longitudes en degrés décimaux
}
void calcul_point_i( float azimut_i, float distance_i, float * latitude, float * longitude)
{
/*
calcul des coordonnées GPS d'un point quelquonque PROCHE de la piste (en vue de faire des "hyppodromes" biens maitrisés)
données:
-azimut et distance du point concerné par rapport au, et vu du, centre de la piste (paramètres: azimut_i et distance_i)
-coordonnées GPS des points extrémités de la piste (lus dans le fichier FG_data.h)
-coordonnées GPS du centre, et l'orientation de la piste (voir fonction "void calculs_GPS()" )
on va alors ajouter la valeur de l'azimut_i à l'orientation de la piste pour faire le calcul
*/
// calcul de l'orientation (relevé) du point (azimut par rapport au nord)
float orientation_point = - 1.0 * orient_piste + azimut_i; // azimut_i étant l'angle entre la piste et la direction du point
// 1 minute d'angle sur un méridien => 1 NM de latitude
// 60mn d'angle (1deg) => 60 NM
// 1 NM => 1/60 de degré -> 0.0166 degrés
* latitude = lat_centre_pst + ( distance_i / 60.0 * sin ( raddeg * ( orientation_point - 90.0 ) ) ) ;
// pour la longitude, il faut tenir compte que la longueur d'un parallèle dépend de la latitude
// (max à l'équateur, nulle au pôle) suivant une loi en cos.
* longitude= lon_centre_pst + ( distance_i / ( 60.0 * cos ( raddeg * lat_centre_pst) ) * cos ( raddeg * ( orientation_point - 90.0 ) ) ) ;
}
void calcul_pos_avion_sur_carte( ) // en px
{
// calcul de la position de l'avion / piste
float dx = GPS_distance_piste * cos ( raddeg * ( GPS_azimut_piste - 90.0 ) ) ;
float dy = GPS_distance_piste * sin ( raddeg * ( GPS_azimut_piste - 90.0 ) ) ;
//if(GPS_distance_piste < 1.0){mode_affi = MODE_PLAN;}
int32_t dx_px = ( dx * px_par_NM) ;
int32_t dy_px = ( dy * px_par_NM) ;
x_avion = 357 - dx_px;
y_avion = 75 - dy_px;
}
void calcul_pos_avion_sur_plan( ) // (sur le plan de l'aérodrome)
{
String s1;
// calcul de la position de l'avion / piste
float dx = GPS_distance_piste * cos ( raddeg * ( GPS_azimut_piste - 90.0 ) ) ;
float dy = GPS_distance_piste * sin ( raddeg * ( GPS_azimut_piste - 90.0 ) ) ;
float dx_px = ( dx * plan_echelle) ;
float dy_px = ( dy * plan_echelle) ;
x_avion = uint16_t ( plan_ref_x - dx_px) ;
y_avion = uint16_t ( plan_ref_y - dy_px) ;
}
void init_sprite_avion( uint16_t couleur)
{
//--------------------------------------------------------------
// dessin du petit avion dans son sprite pour affichage sur la carte (orientaion nulle ici)
//SPR_avion.fillRect(0,0,19,19, VERT); // pour test visuel du cadrage du dessin dans le sprite
SPR_avion.fillRoundRect ( 7 + 1 , 8 - 3 , 3 , 12 , 2 , couleur) ; // fuselage
SPR_avion.fillRoundRect ( 7 - 5 , 8 , 15 , 3 , 2 , couleur) ; // aile
SPR_avion.fillRoundRect ( 7 - 1 , 8 + 8 , 7 , 2 , 2 , couleur) ; // stab
}
void init_sprites( )
{
// sprites représentant les lettres 'N' 'S' 'E' 'O' qui seront affichées sur un cercle, inclinées donc.
SPR_E.setFreeFont ( FF5) ; SPR_E.setTextColor ( JAUNE) ;
SPR_E.createSprite ( SPR_W, SPR_H) ;
SPR_E.setPivot ( SPR_W/ 2 , SPR_H/ 2 ) ; // Set pivot relative to top left corner of Sprite
SPR_E.fillSprite ( NOIR) ;
SPR_E.drawString ( "E" , 2 , 2 ) ;
SPR_N.setFreeFont ( FF5) ; SPR_N.setTextColor ( JAUNE) ;
SPR_N.createSprite ( SPR_W, SPR_H) ;
SPR_N.setPivot ( SPR_W/ 2 , SPR_H/ 2 ) ;
SPR_N.fillSprite ( NOIR) ;
SPR_N.drawString ( "N" , 2 , 2 ) ;
SPR_O.setFreeFont ( FF5) ; SPR_O.setTextColor ( JAUNE) ;
SPR_O.createSprite ( SPR_W, SPR_H) ;
SPR_O.setPivot ( SPR_W/ 2 , SPR_H/ 2 ) ;
SPR_O.fillSprite ( NOIR) ;
SPR_O.drawString ( "W" , 2 , 2 ) ;
SPR_S.setFreeFont ( FF5) ; SPR_S.setTextColor ( JAUNE) ;
SPR_S.createSprite ( SPR_W, SPR_H) ;
SPR_S.setPivot ( SPR_W/ 2 , SPR_H/ 2 ) ;
SPR_S.fillSprite ( NOIR) ;
SPR_S.drawString ( "S" , 2 , 2 ) ;
// sprites représentant les nombres '3' '6' '12' '15' '21' '24' '30' '33'
SPR_3.setFreeFont ( FF5) ; SPR_3.setTextColor ( BLANC) ;
SPR_3.createSprite ( SPR_W, SPR_H) ;
SPR_3.setPivot ( SPR_W/ 2 , SPR_H/ 2 ) ; // Set pivot relative to top left corner of Sprite
SPR_3.fillSprite ( NOIR) ;
SPR_3.drawString ( "3" , 2 , 2 ) ;
SPR_6.setFreeFont ( FF5) ; SPR_6.setTextColor ( BLANC) ;
SPR_6.createSprite ( SPR_W, SPR_H) ;
SPR_6.setPivot ( SPR_W/ 2 , SPR_H/ 2 ) ;
SPR_6.fillSprite ( NOIR) ;
SPR_6.drawString ( "6" , 2 , 2 ) ;
SPR_12.setFreeFont ( FF5) ; SPR_12.setTextColor ( BLANC) ;
SPR_12.createSprite ( SPR_W, SPR_H) ;
SPR_12.setPivot ( SPR_W/ 2 , SPR_H/ 2 ) ;
SPR_12.fillSprite ( NOIR) ;
SPR_12.drawString ( "12" , 2 , 2 ) ;
SPR_15.setFreeFont ( FF5) ; SPR_15.setTextColor ( BLANC) ;
SPR_15.createSprite ( SPR_W, SPR_H) ;
SPR_15.setPivot ( SPR_W/ 2 , SPR_H/ 2 ) ;
SPR_15.fillSprite ( NOIR) ;
SPR_15.drawString ( "15" , 2 , 2 ) ;
SPR_21.setFreeFont ( FF5) ; SPR_21.setTextColor ( BLANC) ;
SPR_21.createSprite ( SPR_W, SPR_H) ;
SPR_21.setPivot ( SPR_W/ 2 , SPR_H/ 2 ) ; // Set pivot relative to top left corner of Sprite
SPR_21.fillSprite ( NOIR) ;
SPR_21.drawString ( "21" , 2 , 2 ) ;
SPR_24.setFreeFont ( FF5) ; SPR_24.setTextColor ( BLANC) ;
SPR_24.createSprite ( SPR_W, SPR_H) ;
SPR_24.setPivot ( SPR_W/ 2 , SPR_H/ 2 ) ;
SPR_24.fillSprite ( NOIR) ;
SPR_24.drawString ( "24" , 2 , 2 ) ;
SPR_30.setFreeFont ( FF5) ; SPR_30.setTextColor ( BLANC) ;
SPR_30.createSprite ( SPR_W, SPR_H) ;
SPR_30.setPivot ( SPR_W/ 2 , SPR_H/ 2 ) ;
SPR_30.fillSprite ( NOIR) ;
SPR_30.drawString ( "30" , 2 , 2 ) ;
SPR_33.setFreeFont ( FF5) ; SPR_33.setTextColor ( BLANC) ;
SPR_33.createSprite ( SPR_W, SPR_H) ;
SPR_33.setPivot ( SPR_W/ 2 , SPR_H/ 2 ) ;
SPR_33.fillSprite ( NOIR) ;
SPR_33.drawString ( "33" , 2 , 2 ) ;
SPR_VOR.setFreeFont ( FF5) ; SPR_33.setTextColor ( BLANC) ;
SPR_VOR.createSprite ( 180 , 180 ) ;
SPR_VOR.setPivot ( 90 , 90 ) ;
SPR_VOR.fillSprite ( NOIR) ; // pour test en rotation --> BLEU
//SPR_avion.setFreeFont(FF5); SPR_33.setTextColor(BLANC);
SPR_avion.createSprite ( 20 , 20 ) ;
SPR_avion.setPivot ( 10 , 10 ) ;
//SPR_avion.fillSprite(NOIR); // pour test en rotation --> BLEU
//--------------------------------------------------------------
// DESSIN DU COMPAS gradué
//--------------------------------------------------------------
// dessine les tirets de graduation du compas sur le sprite SPR_VOR
uint16_t angle1 = 0 ;
uint8_t a;
uint16_t R = 90 ;
for ( uint8_t n= 0 ; n< 72 ; n+= 2 )
{
angle1 = n* 5 ; // 1 tiret tous les 15 degrés
a= 3 ;
//if ((n%2) == 0){a=10;}
if ( ( n% 6 ) == 0 ) { a= 12 ; }
affi_SPR_rayon2( 90 , 90 , R- a, R, angle1, BLANC, false ) ;
}
//--------------------------------------------------------------
// écrit les nombres (sprites définis ci-dessus) sur le sprite SPR_VOR
uint16_t x_spr;
uint16_t y_spr;
x_spr = 90 + 70 * cos ( degTOrad( - 60 ) ) ;
y_spr = 90 - 70 * sin ( degTOrad( - 60 ) ) ;
SPR_VOR.setPivot ( x_spr, y_spr) ;
SPR_15.pushRotated ( & SPR_VOR, 150 ) ; // sur adresse relative du SPR_VOR
x_spr = 90 + 70 * cos ( degTOrad( - 30 ) ) ;
y_spr = 90 - 70 * sin ( degTOrad( - 30 ) ) ;
SPR_VOR.setPivot ( x_spr, y_spr) ;
SPR_12.pushRotated ( & SPR_VOR, 120 ) ;
x_spr = 90 + 70 * cos ( degTOrad( 0 - 5 ) ) ;
y_spr = 90 - 70 * sin ( degTOrad( 0 - 5 ) ) ;
SPR_VOR.setPivot ( x_spr, y_spr) ;
SPR_E.pushRotated ( & SPR_VOR, 90 ) ; // Plot rotated Sprite 'SPR_E' dans le sprite 'SPR_VOR'
x_spr = 90 + 70 * cos ( degTOrad( 30 - 5 ) ) ;
y_spr = 90 - 70 * sin ( degTOrad( 30 - 5 ) ) ;
SPR_VOR.setPivot ( x_spr, y_spr) ;
SPR_6.pushRotated ( & SPR_VOR, 60 ) ;
x_spr = 90 + 70 * cos ( degTOrad( 60 - 5 ) ) ;
y_spr = 90 - 70 * sin ( degTOrad( 60 - 5 ) ) ;
SPR_VOR.setPivot ( x_spr, y_spr) ;
SPR_3.pushRotated ( & SPR_VOR, 30 ) ;
x_spr = 90 + 70 * cos ( degTOrad( 90 - 5 ) ) ;
y_spr = 90 - 70 * sin ( degTOrad( 90 - 5 ) ) ;
SPR_VOR.setPivot ( x_spr, y_spr) ;
SPR_N.pushRotated ( & SPR_VOR, 0 ) ;
x_spr = 90 + 70 * cos ( degTOrad( 120 ) ) ;
y_spr = 90 - 70 * sin ( degTOrad( 120 ) ) ;
SPR_VOR.setPivot ( x_spr, y_spr) ;
SPR_33.pushRotated ( & SPR_VOR, - 30 ) ;
x_spr = 90 + 70 * cos ( degTOrad( 150 ) ) ;
y_spr = 90 - 70 * sin ( degTOrad( 150 ) ) ;
SPR_VOR.setPivot ( x_spr, y_spr) ;
SPR_30.pushRotated ( & SPR_VOR, - 60 ) ;
x_spr = 90 + 70 * cos ( degTOrad( 180 - 5 ) ) ;
y_spr = 90 - 70 * sin ( degTOrad( 180 - 5 ) ) ;
SPR_VOR.setPivot ( x_spr, y_spr) ;
SPR_O.pushRotated ( & SPR_VOR, - 90 ) ;
x_spr = 90 + 70 * cos ( degTOrad( 210 ) ) ;
y_spr = 90 - 70 * sin ( degTOrad( 210 ) ) ;
SPR_VOR.setPivot ( x_spr, y_spr) ;
SPR_24.pushRotated ( & SPR_VOR, 240 ) ;
x_spr = 90 + 70 * cos ( degTOrad( 240 ) ) ;
y_spr = 90 - 70 * sin ( degTOrad( 240 ) ) ;
SPR_VOR.setPivot ( x_spr, y_spr) ;
SPR_21.pushRotated ( & SPR_VOR, 210 ) ;
x_spr = 90 + 70 * cos ( degTOrad( - 90 - 5 ) ) ;
y_spr = 90 - 70 * sin ( degTOrad( - 90 - 5 ) ) ;
SPR_VOR.setPivot ( x_spr, y_spr) ;
SPR_S.pushRotated ( & SPR_VOR, 180 ) ;
}
/*
void init_affi_vor()
{
uint16_t x0 = 120;
uint16_t y0 = 120;
uint16_t w = 240;
uint16_t h = 240;
uint16_t R =100;
uint16_t R2 =70;
//TFT480.fillRect(x0-w/2, y0-h/2, w, h, NOIR);
TFT480.drawRoundRect(0, 0, 230, 240, 5, GRIS_FONCE);
uint16_t y1 = y0+12;
////TFT480.fillTriangle(
////x0, y1+18-h/2,
////x0-5, y1+12-h/2,
////x0+5, y1+12-h/2,
////BLANC);
//TFT480.fillCircle(x0, y0, R, NOIR);
//TFT480.fillCircle(x0, y1, 5, GRIS_FONCE);
//TFT480.drawCircle(x0, y1, R, GRIS_FONCE);
dessine_avion(104, 125);
}
*/
void affi_index_cap( ) // petite pointe de flèche fixe au sommet du grand cercle
{
uint16_t x0 = 110 ;
uint16_t y0 = 120 + 5 ;
uint16_t h = 180 ;
TFT480.fillTriangle (
x0, y0+ 6 - h/ 2 ,
x0- 5 , y0- h/ 2 ,
x0+ 5 , y0- h/ 2 ,
BLANC) ;
TFT480.setFreeFont ( FM9) ;
TFT480.setTextColor ( BLANC, NOIR) ;
//TFT480.drawString("HDG", x0-60, y0-30-h/2);
}
void affi_encoche_hdg( uint16_t alpha_i, uint16_t couleur) // encoche qui se déplace sur le grand sprite
{
init_sprites( ) ;
init_sprite_avion( BLEU) ;
affi_SPR_encoche( 90 , 90 , 90 , - alpha_i + 90 , couleur) ;
//affi_rayon2(x0, y0, 85, 20, -alpha_i, couleur, false);
}
void affi_liste( ) // des aérodromes
{
uint16_t x0= 0 ;
uint16_t x1= 10 ;
uint16_t y0= 0 ;
uint16_t w = 480 ;
uint16_t h = 320 ;
//uint16_t num_ligne =0;
String s1;
TFT480.fillScreen ( NOIR) ;
TFT480.drawRoundRect ( x0, y0, 235 , h, 3 , BLANC) ;
TFT480.setTextFont ( 2 ) ;
uint16_t y= 10 ;
int n;
uint16_t n_min;
uint16_t n_max;
if ( decal> 0 ) { affi_indexV( 225 , 12 , - 1 , JAUNE) ; }
n_min = decal;
n_max = n_min + 17 ;
if ( n_max> nb_elements) { n_max = nb_elements; }
for ( n= n_min; n< n_max; n++ )
{
num_bali= n;
s1= ( String) ( n+ 1 ) ;
if ( n< 9 ) { s1= " " + s1; }
TFT480.setTextColor ( BLEU, NOIR) ;
TFT480.drawString ( s1, x1, y) ;
s1= liste_bali[ num_bali] .ID_OACI ;
TFT480.setTextColor ( VERT, NOIR) ;
TFT480.drawString ( s1, x1+ 22 , y) ;
s1= liste_bali[ num_bali] .nom ;
TFT480.setTextColor ( BLANC, NOIR) ;
TFT480.drawString ( s1, x1+ 65 , y) ;
y+= 18 ;
}
if ( n_max < nb_elements) { affi_indexV( 225 , 300 , 1 , JAUNE) ; }
}
void incremente_ligne( )
{
uint16_t x0= 0 ;
uint16_t x1= 10 ;
uint16_t y0= 0 ;
uint16_t w = 480 ;
uint16_t h = 320 ;
TFT480.drawRect ( x0+ 2 , y0+ 9 + num_ligne* 18 , 215 , 18 , NOIR) ; // efface le cadre
num_ligne++;
if ( ( num_ligne+ decal) >= nb_elements)
{
num_ligne = nb_elements - decal - 1 ; // on ne descend pas d'avantage
}
else if ( num_ligne>= 16 )
{
num_ligne= 15 ;
decal++;
affi_liste( ) ;
}
//affi_int_test(num_ligne, 300, 2, CYAN, NOIR);
//affi_int_test(decal, 300, 3, VERT, NOIR);
num_bali = num_ligne + decal;
TFT480.drawRect ( x0+ 2 , y0+ 9 + num_ligne* 18 , 215 , 18 , JAUNE) ; // encadre la ligne choisie
}
void decremente_ligne( )
{
uint16_t x0= 0 ;
uint16_t x1= 10 ;
uint16_t y0= 0 ;
uint16_t w = 480 ;
uint16_t h = 320 ;
TFT480.drawRect ( x0+ 2 , y0+ 9 + num_ligne* 18 , 215 , 18 , NOIR) ;
if ( num_ligne> 0 )
{
num_ligne-- ;
}
else
{
if ( decal> 0 )
{
decal-- ;
num_ligne= 0 ;
affi_liste( ) ;
}
}
//affi_int_test(num_ligne, 300, 2, CYAN, NOIR);
//affi_int_test(decal, 300, 3, VERT, NOIR);
num_bali = num_ligne + decal;
TFT480.drawRect ( x0+ 2 , y0+ 9 + num_ligne* 18 , 215 , 18 , JAUNE) ;
}
void init_mode_ND( )
{
TFT480.fillScreen ( NOIR) ;
mode_affi= MODE_ND;
init_sprite_avion( BLEU) ;
memo_cap= cap;
dessine_pannel_frq( ) ;
refresh_ND= 1 ;
affi_carte_locale( 235 ,0 ,1 ) ;
affi_ND( cap) ;
}
void choix_aerodrome( ) // choix d'un aérodrome dans la liste
{
uint16_t x0= 0 ;
uint16_t x1= 10 ;
uint16_t y0= 0 ;
uint16_t w = 480 ;
uint16_t h = 320 ;
uint16_t compte= 0 ;
TFT480.fillScreen ( NOIR) ;
TFT480.drawRoundRect ( x0, y0, 235 , h, 3 , BLANC) ;
TFT480.setTextFont ( 2 ) ;
//decal=0;
affi_liste( ) ;
//num_ligne=9;
num_bali = num_ligne + decal;
TFT480.drawRect ( x0+ 2 , y0+ 9 + num_ligne* 18 , 215 , 18 , JAUNE) ;
uint8_t sortir= 0 ;
uint8_t maj_carte= 1 ;
uint16_t compteur2= 0 ;
while ( sortir== 0 )
{
bouton0_etat = digitalRead( GPIO_bouton0) ;
if ( bouton0_etat ! = memo_bouton0_etat)
{
memo_bouton0_etat = bouton0_etat;
if ( bouton0_etat== 0 ) // ============ DESCEND DANS LA LISTE ====================
{
Led2.allume ( ) ;
incremente_ligne( ) ; // si appui bref
while ( bouton0_etat == 0 ) // puis on détecte un éventuel appui long
{
bouton0_etat = digitalRead( GPIO_bouton0) ;
compte++;
if ( compte>= 50 ) // appui long détecté
{
compte= 0 ;
bouton0_etat = digitalRead( GPIO_bouton0) ;
while ( bouton0_etat == 0 ) // tant que le bouton reste appuyé, on incrémente rapidement les pas
{
bouton0_etat = digitalRead( GPIO_bouton0) ;
compteur2= 0 ;
incremente_ligne( ) ; // si appuis répétitifs
//incremente_ligne(); // incrémente les lignes 2 à 2
delay( 100 ) ;
}
}
delay( 20 ) ;
}
maj_carte= 1 ;
}
else { Led2.eteint ( ) ; }
}
bouton1_etat = digitalRead( GPIO_bouton1) ;
if ( bouton1_etat ! = memo_bouton1_etat)
{
memo_bouton1_etat = bouton1_etat;
if ( bouton1_etat== 0 ) // ============ MONTE DANS LA LISTE ====================
{
Led1.allume ( ) ;
decremente_ligne( ) ;
while ( bouton1_etat == 0 ) // puis on détecte un éventuel appui long (500ms)
{
bouton1_etat = digitalRead( GPIO_bouton1) ;
compte++;
if ( compte>= 50 ) // appui long détecté
{
compte= 0 ;
bouton1_etat = digitalRead( bouton1) ;
while ( bouton1_etat == 0 ) // tant que le bouton reste appuyé, on incrémente rapidement les pas
{
bouton1_etat = digitalRead( GPIO_bouton1) ;
compteur2= 0 ;
decremente_ligne( ) ;
//decremente_ligne(); // 2 lignes
delay( 100 ) ;
}
}
delay( 20 ) ;
}
maj_carte= 1 ;
}
else { Led1.eteint ( ) ; }
}
compteur2++;
if ( compteur2 >= 20 )
{
compteur2= 0 ;
{
if ( maj_carte== 1 )
{
zoom= 2 ;
affi_carte_locale( 238 ,0 ,0 ) ;
maj_carte= 0 ;
affi_photo( 238 ,160 ) ;
}
}
}
delay( 10 ) ;
bouton3_etat = digitalRead( GPIO_bouton3) ;
if ( bouton3_etat ! = memo_bouton3_etat)
{
memo_bouton3_etat = bouton3_etat;
if ( bouton3_etat== 0 )
{
if ( saisir_ecran== 1 ) { write_TFT480_on_SDcard( ) ; } /* ====== saisie écran ====== */
else { sortir= 1 ; }
}
}
}
init_variables( ) ;
calculs_GPS( ) ;
read_data_plan_sur_SDcard( ) ;
init_mode_ND( ) ;
}
void affi_ND( float alpha_i) // Navigation Display (le grand cercle à gauche avec les différents affichages dessus)
{
if ( mode_affi ! = MODE_ND) { return ; }
uint16_t w = 180 ;
uint16_t h = 180 ;
uint16_t R = 100 ;
uint16_t R2 = 70 ;
float angle1, angle2;
uint16_t x_spr;
uint16_t y_spr;
angle2 = - alpha_i;
TFT480.setPivot ( 110 , 130 ) ;
SPR_VOR.setPivot ( 90 , 90 ) ;
SPR_VOR.pushRotated ( angle2) ; // affiche le grand cercle sous forme d'un (grand) sprite
dessine_avion( 104 , 125 ) ;
TFT480.drawRoundRect ( 0 , 0 , 230 , 240 , 5 , GRIS_FONCE) ;
affi_index_cap( ) ; // petite pointe de flèche (fixe, orientée vers le bas) au sommet du grand cercle
cadre_cap1.efface ( ) ;
cadre_cap1.affiche_int ( cap,' ' ) ;
TFT480.drawCircle ( 136 , 5 , 2 , BLANC) ; // caractère 'degré'
// rectangle bleu visualisant l'orientation de la piste
//float angle3 = 90.0+ils_orientation; // en degrés décimaux
float angle3 = 90.0 + orient_piste;
affi_rectangle_incline( 110 , 130 , 60 , angle3 + angle2 + 3 , BLEU_CLAIR) ;
// flêche -> direction(/Nord) de la piste, vue de l'avion
// DIRECTION
GPS_azimut_piste = azimut_AB( lat_avion, lon_avion, lat_centre_pst, lon_centre_pst) ; // latitudes et longitudes en degrés décimaux
int16_t alpha2 = GPS_azimut_piste;
if ( alpha2> 360 ) { alpha2 - = 360 ; }
affi_rayon2( 110 , 130 , 70 , 20 , - angle2 - alpha2 + 90 , GRIS_CLAIR, 1 ) ; // vers Nav1 radial = VOR
//affi_rayon2(110, 130, 70, 20, -angle2 -vor_radial +90, GRIS_FONCE, 0); // azimut de l'avion vu du VOR
affi_pointe( 110 , 130 , 70 , - angle2 - alpha2 + 90 , GRIS_CLAIR) ; // pointe dans la direction de l'aérodrome (piste)
// HDG
affi_rayon2( 110 , 130 , 80 , 20 , - angle2 - hdg1 + 90 , OLIVE, 1 ) ; // HDG
}
void dessine_pannel_frq( ) // pour l'affichage des données, voir la fonction "affi_data_piste()"
{
if ( mode_affi == MODE_PLAN) { return ; }
uint16_t x0 = 235 ;
uint16_t y0 = 172 ;
uint16_t xi, yi;
xi = x0+ 5 ;
yi = y0+ 5 ;
TFT480.drawRoundRect ( x0, y0, 245 , 146 , 5 , GRIS) ;
yi = y0+ 5 ;
// -------------------------------------
// entête
cadre_top1.init ( xi,yi,60 ,22 ) ;
cadre_top1.couleur_contour = GRIS_FONCE;
cadre_top1.couleur_texte = BLEU_CLAIR;
cadre_top1.traceContour ( ) ;
TFT480.setTextFont ( 1 ) ;; TFT480.setTextColor ( BLANC, NOIR) ;
TFT480.drawString ( "ALTITUDE:" , xi+ 75 , yi+ 7 ) ;
cadre_top1b.init ( xi+ 135 ,yi,85 ,22 ) ;
cadre_top1b.couleur_contour = GRIS_FONCE;
cadre_top1b.couleur_texte = VIOLET2;
cadre_top1b.traceContour ( ) ;
yi+= 25 ;
cadre_top2.init ( xi,yi,220 ,22 ) ;
cadre_top2.couleur_contour = GRIS_FONCE;
cadre_top2.couleur_texte = BLEU_CLAIR;
cadre_top2.traceContour ( ) ;
yi+= 25 ;
// affichage LATI - LONG
xi= x0+ 5 ;
cadre_position.init ( xi,yi,220 ,15 ) ;
cadre_position.couleur_contour = GRIS_FONCE;
cadre_position.couleur_texte = VIOLET2;
cadre_position.traceContour ( ) ;
yi+= 18 ;
// -------------------------------------
// colonne 0
yi= y0+ 75 ;
TFT480.setFreeFont ( FM9) ; TFT480.setTextColor ( GRIS_CLAIR, NOIR) ;
TFT480.drawString ( "RWY" , xi+ 5 , yi+ 5 ) ;
TFT480.drawCircle ( xi+ 110 , yi+ 5 , 2 , BLEU_CLAIR) ; // caractère 'degré'
TFT480.drawCircle ( xi+ 190 , yi+ 5 , 2 , BLEU_CLAIR) ; // caractère 'degré'
cadre_00.init ( xi+ 45 ,yi,80 ,22 ) ;
cadre_00.couleur_contour = GRIS_FONCE;
cadre_00.couleur_texte = BLEU_CLAIR;
cadre_00.traceContour ( ) ;
yi+= 25 ;
TFT480.setFreeFont ( FM9) ;
TFT480.setTextColor ( GRIS_CLAIR, NOIR) ;
TFT480.drawString ( "longueur" , xi+ 5 , yi+ 5 ) ;
cadre_01.init ( xi+ 100 ,yi,80 ,22 ) ;
cadre_01.couleur_contour = GRIS_FONCE;
cadre_01.couleur_texte = VERT;
cadre_01.traceContour ( ) ;
// -------------------------------------
// colonne 1
xi+= 85 ;
yi= y0+ 75 ;
cadre_10.init ( xi+ 45 ,yi,80 ,22 ) ;
cadre_10.couleur_contour = GRIS_FONCE;
cadre_10.couleur_texte = BLEU_CLAIR;
cadre_10.traceContour ( ) ;
yi+= 25 ;
////cadre_11.init(xi+45,yi,80,22);
////cadre_11.couleur_contour = GRIS_FONCE;
////cadre_11.couleur_texte = VERT;
////cadre_11.traceContour();
////yi+=25;
// -------------------------------------
// colonne 2
xi+= 55 ;
yi= y0+ 75 ;
////cadre_20.init(xi+45,yi,40,22);
////cadre_20.couleur_contour = GRIS_FONCE;
////cadre_20.couleur_texte = GRIS_CLAIR;
////cadre_20.traceContour();
yi+= 25 ;
////cadre_21.init(xi+45,yi,40,22);
////cadre_21.couleur_contour = GRIS_FONCE;
////cadre_21.couleur_texte = BLEU_CLAIR;
////cadre_21.traceContour();
yi+= 25 ;
// -------------------------------------
// pied
xi= x0+ 5 ;
yi= y0+ 125 ;
cadre_bas1.init ( xi,yi,105 ,15 ) ;
cadre_bas1.couleur_contour = GRIS_FONCE;
cadre_bas1.couleur_texte = JAUNE;
cadre_bas1.traceContour ( ) ;
xi+= 110 ;
cadre_bas2.init ( xi,yi,110 ,15 ) ;
cadre_bas2.couleur_contour = GRIS_FONCE;
cadre_bas2.couleur_texte = VERT;
cadre_bas2.traceContour ( ) ;
// -------------------------------------
//juste sous la carte
////cadre_distance_piste.init(235,150,60,18);
////cadre_distance_piste.couleur_contour = GRIS;
////cadre_distance_piste.couleur_texte = VERT;
////cadre_distance_piste.traceContour();
// -------------------------------------
// 3 cadres au dessus du grand cercle :
cadre_hdg1.init ( 10 ,3 ,40 ,22 ) ;
cadre_hdg1.couleur_contour = GRIS;
cadre_hdg1.couleur_texte = OLIVE;
cadre_hdg1.traceContour ( ) ;
TFT480.setTextFont ( 1 ) ;
TFT480.setTextColor ( BLANC, NOIR) ;
TFT480.drawString ( "HDG" , 14 , 26 ) ;
cadre_cap1.init ( 90 ,3 ,40 ,22 ) ;
cadre_cap1.couleur_contour = GRIS;
cadre_cap1.couleur_texte = BLANC;
cadre_cap1.traceContour ( ) ;
TFT480.drawString ( "CAP" , 94 , 26 ) ;
cadre_AZ_piste.init ( 170 ,3 ,40 ,22 ) ;
cadre_AZ_piste.couleur_contour = GRIS;
cadre_AZ_piste.couleur_texte = JAUNE;
cadre_AZ_piste.traceContour ( ) ;
TFT480.drawString ( "Dir PST" , 174 , 26 ) ;
// -------------------------------------
// cadre INFO en bas à gauche de l'afficheur
cadre_info.init ( 5 ,273 ,225 ,44 ) ;
cadre_info.couleur_contour = GRIS;
cadre_info.couleur_texte = BLEU_CLAIR;
cadre_info.traceContour ( ) ;
}
void efface_carte( uint16_t x0, uint16_t y0)
{
TFT480.fillRoundRect ( x0, y0, 245 , 170 , 5 , GRIS_TRES_FONCE) ;
affi_X( x0+ 120 , y0+ 80 ) ;
}
/**
ECHELLES des cartes OpenStreetMap
pour les petites cartes 240x160 px:
N°
0.bmp 500m->70px = 70/0.5 soit 140 px/km
1.bmp 1km->70px = 70/1 soit 70 px/km
2.bmp 2km->70px = 70/2 soit 35 px/km
3.bmp 5km->87px = 87/5 soit 17.5 px/km
4.bmp 10km->87px = 87/10 soit 8.75 px/km
5.bmp 20km->87px = 87/20 soit 4.37 px/km
6.bmp 30km->66px = 65/30 soit 2.19 px/km
On voit que la progression est /2 depuis 140
**/
void affi_X( uint16_t x, uint16_t y)
{
TFT480.drawLine ( x- 20 , y- 20 , x+ 20 , y+ 20 , JAUNE) ;
TFT480.drawLine ( x- 20 , y+ 20 , x+ 20 , y- 20 , JAUNE) ;
}
void affi_photo( uint16_t x0, uint16_t y0)
{
String s1;
char var_array[ 30 ] ;
uint8_t numero= 1 ;
s1= "/bmp/" ;
s1 += liste_bali[ num_bali] .ID_OACI ;
s1 += "/240x160/img" ;
s1 += String( numero) ;
s1+= ".bmp" ;
s1+= '\0 ' ;
//Serial.println(s1);
for ( int i= 0 ; i< 30 ; i++ ) { var_array[ i] = s1[ i] ; }
var_array[ 29 ] = 0 ; // zéro terminal -> string
float contraste= 1.4 ; // 1.4 à ajuster en fonction de l'afficheur et de la qualité de son rétroéclairage
float lum = 100 ; // 100 ; 180 pour photos - une augmentation de cette valeur assombrit l'affichage
TFT480.fillRect ( x0, y0, 240 , 160 , GRIS_TRES_FONCE) ;
affi_X( x0+ 120 , y0+ 80 ) ;
affi_img( x0,y0, 0 , 1.0 , var_array) ; // affichage sans correction de lum ni contraste ; pour test différence...
TFT480.fillRect ( x0, y0- 2 , 240 , 3 , NOIR) ; // trait horizontal
}
void read_data_plan_sur_SDcard( )
{
// récupération des coordonnées du centre de la piste et de l'échelle du plan des installations
// ce qui servira à afficher l'avion correctement sur le plan
File file1;
String filename1;
String s1, s2;
uint8_t c1;
uint16_t p1;
float x0, y0, ech;
filename1= "/bmp/" ;
filename1 += liste_bali[ num_bali] .ID_OACI ;
filename1 += "/480x320/plan1.dat" ;
filename1+= '\0 ' ;
s1= "" ;
file1 = SD.open ( filename1, FILE_READ) ; //ouverture du fichier en lecture
if ( file1)
{
while ( file1.available ( ) > 0 )
{
c1 = file1.read ( ) ;
s1 += char ( c1) ;
}
// centre de la piste
p1 = s1.indexOf ( "x0=" ) ;
s2= s1.substring ( p1+ 3 , p1+ 8 ) ;
plan_ref_x= s2.toFloat ( ) ; // variable globale
p1 = s1.indexOf ( "y0=" ) ;
s2= s1.substring ( p1+ 3 , p1+ 8 ) ;
plan_ref_y= s2.toFloat ( ) ; // variable globale
p1 = s1.indexOf ( "ech=" ) ;
s2= s1.substring ( p1+ 4 , p1+ 9 ) ;
plan_echelle= s2.toFloat ( ) ; // variable globale
}
file1.close ( ) ;
}
void affi_plan_aerodrome( )
{
String s1,s2;
char var_array[ 30 ] ;
uint8_t numero= 1 ;
s1= "/bmp/" ;
s1 += liste_bali[ num_bali] .ID_OACI ;
s1 += "/480x320/plan1.bmp" ;
s1+= '\0 ' ;
//Serial.println(s1);
for ( int i= 0 ; i< 30 ; i++ ) { var_array[ i] = s1[ i] ; }
var_array[ 29 ] = 0 ; // zéro terminal -> string
float contraste= 1.4 ; // 1.4 à ajuster en fonction de l'afficheur et de la qualité de son rétroéclairage
float lum = 100 ; // 100 ; 180 pour photos - une augmentation de cette valeur assombrit l'affichage
TFT480.fillRect ( 0 , 0 , 479 , 319 , GRIS_TRES_FONCE) ;
TFT480.setFreeFont ( FF1) ;
TFT480.setTextColor ( VERT, GRIS_TRES_FONCE) ;
TFT480.drawString ( "Plan" , 200 , 150 ) ;
s2 = liste_bali[ num_bali] .ID_OACI ;
TFT480.drawString ( s2, 200 , 170 ) ;
//efface_carte(x0,y0);
affi_img( 0 ,160 , lum, contraste, var_array) ;
}
void affi_flags( )
{
// la variable 'flags' est reçue du module PFD (où elle est configurée)
TFT480.setFreeFont ( FF1) ;
cadre_info.efface ( ) ;
if ( read_bit( flags, bit_autoland) == 1 ) { cadre_info.affiche_string ( "Approche ILS" ,"Auto-land" ) ; }
if ( read_bit( flags, bit_rudder_decol) == 1 ) { cadre_info.affiche_string ( "Rudder auto" ,"(for takeoff)" ) ; }
if ( read_bit( flags, bit_rudder_attero) == 1 ) { cadre_info.affiche_string ( "Rudder auto" ,"(for Landing)" ) ; }
if ( read_bit( flags, bit_nav_to_piste) == 1 ) { cadre_info.affiche_string ( "Nav to RWY" ,"Rappelez verticale" ) ; }
if ( read_bit( flags, bit_nav_to_pti) == 1 ) { cadre_info.affiche_string ( "Nav to pti" ,"" ) ; }
if ( read_bit( flags, bit_nav_to_ptAA) == 1 ) { cadre_info.affiche_string ( "Nav to A" ,"Approche directe" ) ; }
if ( read_bit( flags, bit_nav_to_ptBB) == 1 ) { cadre_info.affiche_string ( "Nav to B" ,"Approche directe" ) ; }
}
void affi_carte_France( )
{
//uint16_t y0 = 0;
String s1;
char var_array[ 25 ] ;
s1= "/bmp/FRANCE/img1.bmp" ;
for ( int i= 0 ; i< 24 ; i++ ) { var_array[ i] = s1[ i] ; }
var_array[ 24 ] = 0 ; // zéro terminal -> string
float contraste= 0.7 ; // 1.4 à ajuster en fonction de l'afficheur et de la qualité de son rétroéclairage
float lum = 50 ; // 100 ; 180 pour photos - une augmentation de cette valeur assombrit l'affichage
affi_img( 0 ,160 , lum, contraste, var_array) ;
}
void affi_carte_locale( uint16_t x0, uint16_t y0, uint8_t ajouts) // ajouts = cadre, avion, ILS, cercles...
{
uint16_t x_centre = 357 ;
uint16_t y_centre = 80 ;
//uint16_t y0 = 0;
String s1;
char var_array[ 25 ] ;
s1= "/bmp/" ;
s1 += liste_bali[ num_bali] .ID_OACI ;
s1 += "/240x160/" ;
s1 += String( zoom) ;
s1+= ".bmp" ;
s1+= '\0 ' ;
//Serial.println(s1);
for ( int i= 0 ; i< 24 ; i++ ) { var_array[ i] = s1[ i] ; }
var_array[ 24 ] = 0 ; // zéro terminal -> string
float contraste= 1.4 ; // 1.4 à ajuster en fonction de l'afficheur et de la qualité de son rétroéclairage
float lum = 100 ; // 100 ; 180 pour photos - une augmentation de cette valeur assombrit l'affichage
//affi_img(237,156, 0, 1.0, var_array); // affichage sans correction de lum ni contraste ; pour test différence...
efface_carte( x0,y0) ;
affi_img( x0,y0, lum, contraste, var_array) ; // affichage corrigé
//calcul de l'échelle compte tenu des valeurs mesurées, voir commentaire au-dessus de cette fonction
px_par_km = 140.0 / ( 1 << zoom) ; // -> variable globale
px_par_NM = px_par_km * 1.852 ; // -> variable globale
if ( ajouts== 1 )
{
//TFT480.drawRoundRect(x0, y0, 245, 170, 5, GRIS);
TFT480.setFreeFont ( FM9) ;
TFT480.setTextColor ( BLANC) ;
s1= ( String) ( zoom) ;
//s1+= ".bmp";
TFT480.fillRect ( x0+ 220 , y0, 20 , 14 , GRIS_AF) ; //efface
TFT480.drawString ( s1, x0+ 220 , y0) ; // affiche le numéro de la carte
// trace 'faisceau localizer' (même si pas d'ILS, quand même utile sur la carte pour une approche VFR)
float alpha1 = 90.0 - orient_piste; // angle direct
if ( alpha1< 0 ) { alpha1 += 360.0 ; }
float alpha2 = alpha1 + 180.0 ;
if ( alpha2> 360 ) { alpha2 - = 360.0 ; } // angle opposé
affi_rayon2( x_centre, y_centre, 2 , 150 , alpha1- 3.0 , NOIR, 0 ) ;
affi_rayon2( x_centre, y_centre, 2 , 150 , alpha1+ 3.0 , NOIR, 0 ) ;
affi_rayon2( x_centre, y_centre, 2 , 150 , alpha2- 3.0 , NOIR, 0 ) ;
affi_rayon2( x_centre, y_centre, 2 , 150 , alpha2+ 3.0 , NOIR, 0 ) ;
refresh_carte= 0 ;
affi_char_r_alpha( x_centre, y_centre, 60 , alpha1, 'B' , NOIR) ;
affi_char_r_alpha( x_centre, y_centre, 60 , alpha2, 'A' , NOIR) ;
// cercle 10NM
TFT480.setTextFont ( 1 ) ;
TFT480.setTextColor ( NOIR) ;
if ( zoom> 4 )
{
uint16_t r = 10 * ( uint16_t ) px_par_NM;
TFT480.drawCircle ( x_centre, y_centre, r, NOIR) ;
TFT480.drawString ( "10" ,x_centre+ 3 + 0.7 * r,75 + 0.7 * r) ;
}
// cercle 20NM
if ( zoom> 5 )
{
uint16_t r = 20.0 * px_par_NM;
TFT480.drawCircle ( x_centre, y_centre, r, NOIR) ;
TFT480.drawString ( "20" ,x_centre+ 3 + 0.7 * r,75 + 0.7 * r) ;
}
// cercle 30NM
if ( zoom> 6 )
{
uint16_t r = 40.0 * px_par_NM;
TFT480.drawCircle ( x_centre, y_centre, r, NOIR) ;
TFT480.drawString ( "40" ,x_centre+ 3 + 0.7 * r,75 + 0.7 * r) ;
}
// cercle 80NM
if ( zoom> 7 )
{
uint16_t r = 80.0 * px_par_NM;
TFT480.drawCircle ( x_centre, y_centre, r, NOIR) ;
TFT480.drawString ( "80" ,x_centre+ 3 + 0.7 * r,75 + 0.7 * r) ;
}
// cercle 160NM
if ( zoom> 8 )
{
uint16_t r = 160.0 * px_par_NM;
TFT480.drawCircle ( x_centre, y_centre, r, NOIR) ;
TFT480.drawString ( "160" ,x_centre+ 3 + 0.7 * r,75 + 0.7 * r) ;
}
// cercle 320NM
if ( zoom> 9 )
{
uint16_t r = 320.0 * px_par_NM;
TFT480.drawCircle ( x_centre, y_centre, r, NOIR) ;
TFT480.drawString ( "320" ,x_centre+ 3 + 0.7 * r,75 + 0.7 * r) ;
}
// cercle 640NM
if ( zoom> 10 )
{
uint16_t r = 640.0 * px_par_NM;
TFT480.drawCircle ( x_centre, y_centre, r, NOIR) ;
TFT480.drawString ( "640" ,x_centre+ 3 + 0.7 * r,75 + 0.7 * r) ;
}
affi_avion_sur_carte( cap) ;
// POUR TEST
dessine_point_sur_carte( lat_centre_pst, lon_centre_pst, BLEU) ; // ok
float lat_A= liste_bali[ num_bali] .lat_A ;
float lon_A= liste_bali[ num_bali] .lon_A ;
dessine_point_sur_carte( lat_A, lon_A, BLEU) ; // ok
float lat_B= liste_bali[ num_bali] .lat_B ;
float lon_B= liste_bali[ num_bali] .lon_B ;
dessine_point_sur_carte( lat_B, lon_B, BLEU) ; // ok
float lat_1, lon_1;
/*
for (int i=0; i<=6; i++)
{
calcul_point_i(30.0*i, 10.0, &lat_1, &lon_1); // en 1/2 cercle, à 10NM du centre de la piste
dessine_point_sur_carte(lat_1, lon_1, ROUGE);
}
*/
float e = 1.5 ;
calcul_point_i( 0 , 1.0 * e, & lat_1, & lon_1) ; dessine_point_sur_carte( lat_1, lon_1, ROUGE) ;
calcul_point_i( 0 , 4.0 * e, & lat_1, & lon_1) ; dessine_point_sur_carte( lat_1, lon_1, ROUGE) ;
calcul_point_i( 16 , 5.1 * e, & lat_1, & lon_1) ; dessine_point_sur_carte( lat_1, lon_1, ROUGE) ;
calcul_point_i( 46 , 4.0 * e, & lat_1, & lon_1) ; dessine_point_sur_carte( lat_1, lon_1, ROUGE) ;
calcul_point_i( 72.3 , 3.1 * e, & lat_1, & lon_1) ; dessine_point_sur_carte( lat_1, lon_1, ROUGE) ;
calcul_point_i( 109 , 3.1 * e, & lat_1, & lon_1) ; dessine_point_sur_carte( lat_1, lon_1, ROUGE) ;
calcul_point_i( 135 , 4.0 * e, & lat_1, & lon_1) ; dessine_point_sur_carte( lat_1, lon_1, ROUGE) ;
calcul_point_i( 163 , 5.1 * e, & lat_1, & lon_1) ; dessine_point_sur_carte( lat_1, lon_1, ROUGE) ;
calcul_point_i( 180 , 4.0 * e, & lat_1, & lon_1) ; dessine_point_sur_carte( lat_1, lon_1, ROUGE) ;
calcul_point_i( 180 , 1.0 * e, & lat_1, & lon_1) ; dessine_point_sur_carte( lat_1, lon_1, ROUGE) ;
if ( read_bit( flags, bit_autoland) == 1 )
{
TFT480.setFreeFont ( FF1) ;
TFT480.setTextColor ( ORANGE, NOIR) ;
cadre_bas1.affiche_string ( "zoom auto" ,"" ) ;
}
}
}
void affi_position( float lat_i, float long_i, uint16_t x_i, uint16_t y_i)
{
String s1= String( abs ( lat_i) ,4 ) ;
if ( lat_i> 0 ) { s1+= " N" ; } else { s1+= " S" ; }
s1+= " / " ;
s1+= String( abs ( long_i) ,4 ) ;
if ( long_i> 0 ) { s1+= " E" ; } else { s1+= " O" ; }
TFT480.setTextFont ( 1 ) ;
TFT480.drawString ( s1, x_i, y_i) ;
}
void affi_data_piste( ) // dans la partie droite ; pour l'init des cadres, voir la fonction "dessine_pannel_frq()"
{
if ( mode_affi == MODE_PLAN) { return ; }
String s1,s2;
float v1;
// -------------------------------------
// entête
s1= liste_bali[ num_bali] .ID_OACI ;
TFT480.setFreeFont ( FM9) ;
cadre_top1.affiche_string ( s1,"" ) ;
s1= ( String) liste_bali[ num_bali] .altitude ;
s1 += " ft" ;
TFT480.setFreeFont ( FM9) ;
cadre_top1b.affiche_string ( s1,"" ) ;
s1= ( String) ( num_bali + 1 ) ;
s1+= " " ;
s1+= liste_bali[ num_bali] .nom ;
if ( ( s1.length ( ) ) > 19 ) { TFT480.setTextFont ( 2 ) ; } else { TFT480.setFreeFont ( FM9) ; }
cadre_top2.affiche_string ( s1,"" ) ;
float alpha1 = orient_piste; // angle direct
if ( alpha1< 0 ) { alpha1 += 360.0 ; }
float alpha2 = alpha1 + 180.0 ;
if ( alpha2> 360 ) { alpha2 - = 360.0 ; } // angle opposé
cadre_00.affiche_float ( alpha1, 1 ) ;
cadre_10.affiche_float ( alpha2, 1 ) ;
uint16_t longueur1= ( uint16_t ) longueur_piste; // en m
cadre_01.affiche_int ( longueur1, 'm' ) ;
//cadre_info.efface();
//cadre_info.couleur_texte = GRIS_CLAIR;
// affichage de la position géographique de l'aérodrome
TFT480.setTextColor ( VIOLET2, NOIR) ;
affi_position( lat_centre_pst , lon_centre_pst, cadre_position.x0 + 5 , cadre_position.y0 + 5 ) ;
refresh_ND= 0 ;
}
/*
void affi_switches()
{
TFT480.setTextFont(1);
TFT480.fillRect(420, 302, 30, 10, NOIR); // efface le nombre précédemment affiché
TFT480.setTextColor(GRIS);
TFT480.drawString(switches, 420, 302);
}
*/
void init_WiFi( )
{
WiFi.persistent ( false ) ;
WiFi.begin ( ssid, password) ;
delay( 2000 ) ;
}
void init_boutons( )
{
pinMode( GPIO_SW0, INPUT) ;
//pinMode(led1, OUTPUT);
//pinMode(rot1a, INPUT_PULLUP);
//pinMode(rot1b, INPUT_PULLUP);
pinMode( GPIO_bouton0, INPUT_PULLUP) ;
pinMode( GPIO_bouton1, INPUT_PULLUP) ;
pinMode( GPIO_bouton2, INPUT_PULLUP) ;
pinMode( GPIO_bouton3, INPUT_PULLUP) ;
}
void init_afficheur( )
{
TFT480.init ( ) ;
TFT480.setRotation ( 3 ) ; // 0..3 à voir, suivant disposition de l'afficheur
TFT480.fillScreen ( NOIR) ;
TFT480.setTextColor ( NOIR, BLANC) ;
}
void init_variables( )
{
cap= 0 ;
zoom= 1 ;
SW0_etat = digitalRead( SW0) ;
memo_SW0_etat = SW0_etat;
x_avion= 0 ;
y_avion= 0 ;
memo_x_avion= 0 ;
memo_y_avion= 0 ;
}
void init_Leds( ) // pour l'affichage des données, voir la fonction "affi_data_piste()"
{
uint16_t x0 = 470 ;
uint16_t y0 = 116 ;
uint16_t yi = y0;
Led1.init ( x0,yi, 20 , 20 ) ;
Led1.set_couleur ( BLEU) ;
Led1.eteint ( ) ;
yi+= 80 ;
Led2.init ( x0,yi, 20 , 20 ) ;
Led2.set_couleur ( ROUGE) ;
Led2.eteint ( ) ;
}
void trace_point_FR( float lat_i, float lon_i, uint8_t diam, uint16_t couleur)
{
float x;
float y;
// sur l'image .bmp 360x480px de la France entière
// calibration :
TFT480.fillCircle ( 73 , 44 , 2 , BLANC) ; // 50°N -4° ->REF
TFT480.fillCircle ( 73 , 258 , 2 , BLANC) ; // 44°N -4°
TFT480.fillCircle ( 369 , 44 , 2 , BLANC) ; // 50°N +8°
TFT480.fillCircle ( 369 , 258 , 2 , BLANC) ; // 44°N +8°
/**
lat=4° -> x=73px
lat=8° -> x=369px
ech_x = dx/dlon = (369-73)/(8+4)= 296/12 = 24.66
lon=44 -> y=258px
lon=50 -> y=44px
ech_y= dy/dlat = (258-44)/(50-44) = 214/6 = 35.66
il vient:
x=73+(lon-4)*74
y=44+(lat-50)*35.66
**/
x= 73.0 + ( lon_i+ 4 ) * 24.66 ; // ok
y= 44.0 + ( 50.0 - lat_i) * 35.66 ; //ok
if ( diam> 1 ) { TFT480.fillCircle ( ( uint16_t ) x, ( uint16_t ) y, diam, couleur) ; }
else { TFT480.drawPixel ( ( uint16_t ) x, ( uint16_t ) y, couleur) ; }
}
void affi_1_airport( float lat_i, float lon_i) // sur carte France
{
trace_point_FR( lat_i, lon_i, 4 , JAUNE) ;
}
void affi_avion_sur_carte_FR( ) // sur carte France
{
trace_point_FR( lat_avion, lon_avion, 1 , BLANC) ;
}
void affi_all_airports( ) // sur carte France
{
float lat_i;
float lon_i;
for ( uint16_t i= 0 ; i< nb_elements ; i++ )
{
lat_i = liste_bali[ i] .lat_A ;
lon_i = liste_bali[ i] .lon_A ;
trace_point_FR( lat_i, lon_i, 2 , ROUGE) ;
}
affi_1_airport( liste_bali[ num_bali] .lat_A , liste_bali[ num_bali] .lon_A ) ; // celui sélectionné
affi_avion_sur_carte_FR( ) ; // position actuelle de l'avion
}
void affi_navi( )
{
zoom= 1 ;
affi_ND( cap) ;
memo_cap= cap;
affi_carte_locale( 235 ,0 ,1 ) ;
dessine_pannel_frq( ) ;
refresh_carte= 0 ;
}
void setup( )
{
Serial.begin ( 19200 ) ;
init_variables( ) ;
init_WiFi( ) ;
init_boutons( ) ;
init_afficheur( ) ;
init_SDcard( ) ;
init_FG_bali( ) ;
init_sprites( ) ;
init_sprite_avion( BLEU) ;
//init_affi_vor();
/*
affi_carte_France();
//trace_point_FR(46.0, 2.0); // sur carte France
affi_all_airports();
delay(2000);
//while(1);
*/
TFT480.setTextColor ( BLANC, NOIR) ;
TFT480.setFreeFont ( FF19) ;
String s1 = "ND v" ;
s1+= version;
init_Leds( ) ;
affi_navi( ) ;
}
void affichages( )
{
affi_dst_GPS( ) ;
affi_direction_piste( ) ;
affi_dst_piste( ) ;
if ( cap ! = memo_cap)
{
affi_ND( cap) ;
refresh_ND= 1 ; // pour raffraichir l'affichage du panneau de fréquences à droite
memo_cap = cap;
}
//affi_float_test(145.62 , 0, BLEU);
//affi_float_test(25.89 , 1 , GRIS_FONCE);
}
void teste_boutons( ) // boutons reliés à l'ESP n°2 (ND), pas ceux de l'ESP du SW
{
// REMARQUE : les boutons sont aussi testés localement dans la fonction "choix_aerodrome()"
bouton2_etat = digitalRead( GPIO_bouton2) ; // ZOOM -
//Serial.print(bouton0_etat);
if ( bouton2_etat ! = memo_bouton2_etat)
{
memo_bouton2_etat = bouton2_etat;
if ( bouton2_etat== 0 )
{
if ( zoom == 0 )
{
mode_affi= MODE_ND;
init_mode_ND( ) ;
}
zoom++;
if ( zoom< 0 ) { zoom= 0 ; }
if ( zoom > 11 ) { zoom= 11 ; }
//refresh_carte=1;
affi_carte_locale( 235 ,0 ,1 ) ;
}
affi_ND( cap) ;
}
bouton3_etat = digitalRead( GPIO_bouton3) ; // ZOOM +
//Serial.println(bouton1_etat);
if ( bouton3_etat ! = memo_bouton3_etat)
{
memo_bouton3_etat = bouton3_etat;
if ( bouton3_etat== 0 )
{
zoom-- ;
if ( zoom< 0 ) { zoom = 0 ; }
if ( zoom > 11 ) { zoom= 11 ; }
//Serial.print("zoom="); Serial.println(zoom);
if ( zoom == 0 ) // rappel: il n'y a pas de carte 0; le 1er numéro est 1.bmp, voir dans le dossier bmp...
{
mode_affi= MODE_PLAN;
init_sprite_avion( ROUGE) ;
affi_plan_aerodrome( ) ;
}
else
{
mode_affi= MODE_ND;
affi_carte_locale( 235 ,0 ,1 ) ;
}
affi_ND( cap) ;
}
}
bouton0_etat = digitalRead( GPIO_bouton0) ;
//Serial.print(bouton0_etat);
if ( bouton0_etat ! = memo_bouton0_etat) // le bouton qui sert aussi à descendre dans la liste, en mode liste
{
memo_bouton0_etat = bouton0_etat;
if ( bouton0_etat== 0 )
{
mode_affi= MODE_LISTE;
choix_aerodrome( ) ;
}
}
bouton1_etat = digitalRead( GPIO_bouton1) ;
if ( bouton1_etat ! = memo_bouton1_etat) // le bouton qui sert aussi à monter dans la liste, en mode liste
{
memo_bouton1_etat = bouton1_etat;
if ( bouton1_etat== 0 )
{
mode_affi= MODE_LISTE;
choix_aerodrome( ) ;
}
}
}
void toutes_les_10s( )
{
dessine_pannel_frq( ) ; // donc le cadre s'abime lors de la rotation du sprite à gauche
}
void toutes_les_1s( )
{
nb_secondes++;
if ( refresh_carte== 1 )
{
if ( mode_affi ! = MODE_PLAN)
{
affi_ND( cap) ;
affi_carte_locale( 235 ,0 ,1 ) ;
}
}
if ( ( nb_secondes> 9 ) == 0 )
{
nb_secondes= 0 ;
toutes_les_10s( ) ;
}
}
void interroge_WiFi( )
{
// voir les "server.on()" dans la fonction "setup()" du code du PFD pour la source des données
recp_hdg = "" ;
if ( WiFi.status ( ) == WL_CONNECTED )
{
httpGetHDG( ) ; // envoie requete au serveur
TFT480.setTextColor ( VERT, NOIR) ;
hdg1= recp_hdg.toInt ( ) ;
if ( hdg1 ! = memo1_hdg1)
{
if ( mode_affi == MODE_ND)
{
refresh_Encoche= 1 ;
cadre_hdg1.efface ( ) ;
cadre_hdg1.affiche_int ( hdg1,' ' ) ;
TFT480.drawCircle ( 52 , 5 , 2 , BLANC) ; // caractère 'degré'
}
}
httpGetCap( ) ;
cap= recp_cap.toInt ( ) ;
if ( cap ! = memo_cap)
{
if ( mode_affi == MODE_ND)
{
affi_ND( cap) ;
refresh_Encoche= 1 ;
}
}
httpGetLatitude( ) ;
lat_avion= recp_latitude.toFloat ( ) / 10E3 ;
httpGetLongitude( ) ;
lon_avion= recp_longitude.toFloat ( ) / 10E3 ;
httpGetHauteur( ) ;
hauteur_AAL = recp_hauteur.toFloat ( ) / 10 ;
httpGetParams( ) ;
flags = recp_flags.toInt ( ) ; // les significations des bits sont définies dans le fichier "Fonctions1.h"
//affi_int_test(flags, 300, 1, VERT, NOIR);
}
else if ( premier_passage == 1 )
{
RAZ_variables( ) ;
affi_ND( cap) ;
premier_passage= 0 ;
}
}
void toutes_les_100ms( )
{
calculs_GPS( ) ;
nb_100ms++;
if ( nb_100ms> 10 )
{
nb_100ms= 0 ;
toutes_les_1s( ) ;
}
if ( mode_affi ! = MODE_PLAN)
{
if ( refresh_ND== 1 )
{
affi_data_piste( ) ;
affi_ND( cap) ;
refresh_ND= 0 ;
//refresh_Encoche=1;
}
if ( refresh_Encoche== 1 )
{
affi_encoche_hdg( memo1_hdg1, NOIR) ; // efface
affi_encoche_hdg( hdg1, OLIVE) ;
affi_ND( cap) ;
memo1_hdg1= hdg1;
refresh_Encoche= 0 ;
}
calcul_pos_avion_sur_carte( ) ;
affi_avion_sur_carte( cap) ;
TFT480.setTextColor ( VIOLET2, NOIR) ;
affi_position( lat_avion, lon_avion, 55 , 230 ) ;
}
if ( mode_affi == MODE_PLAN)
{
calcul_pos_avion_sur_plan( ) ;
affi_avion_sur_plan( cap) ;
}
}
/** ==================================================================
variables à gérer obligatoirement */
//le nombre de ports GPIO libres étant atteint, on va utiiser un switch unique pour deux fonctions :
uint8_t fonction_bt0 = 1 ; // 0=saisie écran ; 1=feux d'atterrissage
/** ================================================================== */
uint16_t t= 0 ; // temps -> rebouclera si dépassement
void loop( )
{
SW0_etat = digitalRead( GPIO_SW0) ;
if ( SW0_etat== 0 )
{
mode_affi= MODE_CARTE_FR;
affi_carte_France( ) ;
affi_all_airports( ) ;
while ( digitalRead( GPIO_SW0) == 0 )
{
interroge_WiFi( ) ;
affi_avion_sur_carte_FR( ) ; // et boucle
}
mode_affi = MODE_ND;
TFT480.fillScreen ( NOIR) ;
TFT480.setTextColor ( NOIR, BLANC) ;
affi_navi( ) ;
init_mode_ND( ) ;
}
teste_boutons( ) ;
temps_ecoule = micros( ) - memo_micros;
if ( temps_ecoule >= 1E5 ) // (>=) et pas strictement égal (==) parce qu'alors on rate l'instant en question
{
memo_micros = micros( ) ;
toutes_les_100ms( ) ;
}
//Serial.print("mode_affi="); Serial.println(mode_affi);
if ( mode_affi == MODE_ND)
{
compteur1+= 1 ;
if ( compteur1 >= 100 ) // tous les 1000 passages dans la boucle
{
compteur1= 0 ;
}
interroge_WiFi( ) ; // et envoie les arguments
affichages( ) ;
delay( 30 ) ;
}
if ( mode_affi == MODE_LISTE)
{
choix_aerodrome( ) ;
}
if ( mode_affi == MODE_PLAN)
{
interroge_WiFi( ) ;
}
if ( flags ! = memo_flags)
{
memo_flags = flags;
affi_flags( ) ;
}
/** ----------------------------------------------
pour tester si data_ok à bien la valeur attendue, c.a.d si toutes les acquisitions sont effectuées
ce qui est le cas lorsque le dialogue avec le serveur de protocole FG est correctement programmé
sachant que ce ne sont pas les pièges qui manquent !
*/
////TFT480.setFreeFont(FM9);
////TFT480.setTextColor(VERT, NOIR);
////TFT480.drawString("d_sum:", 0, 0);
////s2= (String) data_ok;
////TFT480.fillRect(70, 0, 50, 30, NOIR);
////TFT480.drawString(s2, 70, 0);
/** ---------------------------------------------- **/
//---------------------------------------------------------------------------------------
}
/** ***************************************************************************************
CLASS Cadre // affiche un nombre ou un petit texte dans un rectangle
********************************************************************************************/
// Constructeur
Cadre:: Cadre ( )
{
}
void Cadre:: init ( uint16_t xi, uint16_t yi, uint16_t dxi, uint16_t dyi)
{
x0 = xi;
y0 = yi;
dx = dxi;
dy = dyi;
TFT480.setTextColor ( BLANC, NOIR) ;
}
void Cadre:: traceContour ( )
{
TFT480.drawRoundRect ( x0, y0, dx, dy, 3 , couleur_contour) ;
}
void Cadre:: efface ( )
{
TFT480.fillRect ( x0, y0, dx, dy, NOIR) ;
traceContour( ) ;
}
void Cadre:: affiche_int ( uint32_t valeur, char lettre)
{
String s1;
efface( ) ;
TFT480.setFreeFont ( FM9) ;
TFT480.setTextColor ( couleur_texte, NOIR) ;
s1 = String( valeur) ;
//TFT480.fillRect(x0, y0, 52, 18, NOIR); // efface
TFT480.drawString ( s1, x0+ 5 , y0+ 5 ) ;
s1 = String( lettre) ;
TFT480.drawString ( s1, x0+ 50 , y0+ 5 ) ;
}
void Cadre:: affiche_float ( float valeur, int nb_dec)
{
efface( ) ;
TFT480.setFreeFont ( FM9) ;
TFT480.setTextColor ( couleur_texte, NOIR) ;
String s1 = String( valeur, nb_dec) ;
//TFT480.fillRect(x0, y0, 52, 18, NOIR); // efface
TFT480.drawString ( s1, x0+ 5 , y0+ 5 ) ;
}
void Cadre:: affiche_string ( String s1, String s2)
{
// Pour cette méthode, la police de caract doit être choisie au préalable, extérieurement
efface( ) ;
TFT480.setTextColor ( couleur_texte, NOIR) ;
TFT480.drawString ( s1, x0+ 5 , y0+ 5 ) ;
if ( s2 ! = "" ) { TFT480.drawString ( s2, x0+ 5 , y0+ 20 ) ; }
}
/** ***************************************************************************************
CLASS Led // affiche un petit rectangle coloré
********************************************************************************************/
// Constructeur
Led:: Led ( )
{
}
void Led:: init ( uint16_t xi, uint16_t yi, uint16_t dxi, uint16_t dyi)
{
x0 = xi;
y0 = yi;
dx = dxi;
dy = dyi;
}
void Led:: allume ( )
{
TFT480.fillRect ( x0, y0, dx, dy, couleur) ;
}
void Led:: eteint ( )
{
TFT480.fillRect ( x0, y0, dx, dy, GRIS_TRES_FONCE) ;
TFT480.drawRect ( x0, y0, dx, dy, couleur) ; // bordure
}
void Led:: set_couleur ( uint16_t coul_i)
{
couleur = coul_i;
}
21 Planche de bord
23 juillet 2021 :
22 La voici la planche de bord
19 septembre 2021 :
23 Utilisation
Le Navigation Display reçoit toutes ses données par WiFi, depuis l'ESP du PFD. Il n'est donc pas nécessaire de le connecter sur un port USB, il peut être simplement alimenté par un adaptateur 5V, ou sur l'alim 5V du PFD (en amont du régulateur 3V3 si toutefois le port USB0 (et son câble) qui alimentent le PFD peuvent fournir suffisamment de courant).
Avant de décoller :
Dés-enclencher l'autoland du PFD.
Choisir un aérodrome dans le ND (avec l'encodeur rotatif), ce qui renseignera l'ensemble des deux instruments (par la liaison WiFi entre le PFD et le ND) ET le programme Flightgear (par la liaison USB entre l'ordinateur et le PFD) concernant les fréquences radio du VOR le plus proche et de l'ILS, ainsi que les cartes à afficher (avec choix du zoom par le second encodeur rotatif du ND). Je rajouterai des aérodromes petit à petit...
Régler le QNH afin que l'afficheur de l'altitude indique 0 avion au sol. Pour ce réglage, utiliser la molette de la souris sur le petit bouton indiqué sur la figure ci-contre, dans Flightgear.
Régler l'HDG suivant l'axe de la piste (SYNC HDG) afin d'éviter une surprise lors de l'activation de l'Autopilot.
Régler la consigne d'altitude de l'Autopilot (ASEL) avec l'encodeur rotatif (3000ft par exemple). Toutes ces valeurs ne seront prises en compte que lors de l'activation de l'autopilot.
Sortir les flaps (10°, pas à fond donc).
Desserrer le frein de parking.
Mettre les gaz.
Lâcher les freins.
La trajectoire au sol se contrôle au palonnier
Apprendre à piloter, il reste vingt secondes...
Dès le décollage effectué, rentrer le train.
Lorsque la vitesse et le taux de montés sont satisfaisants, rentrer les flaps.
Stabiliser les paramètres de vols et placer l'avion en palier au moment d'enclencher l'Autopilot, pour éviter des efforts sur la structure de l'appareil.
On peut dès lors piloter par action sur l'Autopilot de Flightgear depuis nos ESP.
24 Un troisième ESP32 gérant des boutons
25 Le panel des boutons
20 août 2021 :
Le panel des boutons est opérationnel, il communique avec le PFD, par WiFi comme prévu. Les données d'appui des boutons sont codées en binaire sur un mots de 16 bits transmis au PFD par argument dans une requête html.
L'ESP32 est disposé côté CU, écarté des pistes par l'emploi d'un connecteur femelle au pas 2.54mm
Reste à lui confectionner une face avant (à l'imprimante 3D) et un petit boîtier pour protéger l’électronique.
Pour l'instant seuls quatre boutons ont une fonction, deux pour régler la consigne de cap par sauts de +/-30° et deux pour la consigne d'altitude par sauts de +/- 1000 pieds ce qui rend le réglage (en vol) du pilote automatique bien plus pratique. (Les réglages fins restent opérationnels avec les encodeurs rotatifs pas à pas du PFD)
Les autres, au nombre de quatre également, alignés en colonne sur la droite du panel, n'ont pas de fonction définie pour l'instant bien qu'ils soient pris en compte par le logiciel et transmis au PFD. Mais ce ne sont pas les idées qui manquent, bien que les fonctions de base comme sortie du train d'atterrissage ou des flaps sont, pour ma part, déjà commandées par des boutons sur le joystick principal.
(j'utilise aussi un pédalier pour la gouverne de lacet, confectionné à partir d'un "stepper" de chez Déca..lon, méchamment bricolé à la scie à métaux, avec ajout d'un potentiomètre relié à un second joystick trafiqué en conséquence) :
26 Les boutons sont dans la boite
22 août 2021 :
27 Code source du panel des boutons (SW)
28 Sérigraphie
5 septembre 2021 :
J'ai imprimé des labels sur le panel des boutons (SW) avec une graveuse laser (NEJE Master 2S). La surface à graver étant en PLA, blanc de surcroît, le résultat ne pouvait guère être très bon. (Il faut au préalable peindre la surface avec un marqueur noir, puis la nettoyer après la gravure, ce qui la laisse une peu sale... Quant au contraste obtenu, c'est le minimum syndical ! Le mot 'AUTOLAND' tout fin et tout net... a été rajouté sur la photo avec Gimp !)
Mais je ne suis pas inquiet, j'ai commandé des plaques fines en alu anodisé coloré qui sont faites pour être gravées au laser. Et je vais voir aussi du côté d'une découpeuse vinyle, il semblerait qu'on peut créer des logos et des textes très fins.
Quant au soft il continue à évoluer :
- ajout de nouvelles petites cartes géographiques (OSM) pour le ND.
- désormais le basculement (toggle) de l'autoland se fait par un bouton sur le module SW (voir photo), ce qui libère l’interrupteur à bascule en haut à gauche du PFD.
9 septembre 2021 :
L’interrupteur à bascule en haut à gauche du PFD sert maintenant à la commande des feux d’atterrissage.
Le dernier bouton du panel des boutons, celui, rouge, à gauche en bas, se voit attribué à la fonction "HDG SYNC" , c'est à dire qu'il règle la consigne de cap du pilote automatique sur le cap actuel. Ça évite de tourner des boutons, c'est précis, rapide et efficace.
17 septembre 2021 :
La découpeuse vinyle "Silhouette Portrait 3" m'a permis d'obtenir le résultat visible sur l'image de droite. J'ai choisi une police de caractères (sous Inkscape) un peu grosse afin d'éviter des problèmes de découpe. Du coup on les voit bien ! Ça laisse entrevoir la réalisation de tout une planche de bord réaliste... Aie, faudrait pas que je dise des choses comme ça, dans un élan d'enthousiasme, après je me sens obligé de le faire !
29 Un pas de plus vers une planche de bord
27 septembre 2021 :
30 Nouvelle version, nouvelles fonctions...
22 octobre 2021 :
version="17.0"
1) J'ai tourné l'ensemble à 180°, ce qui permet d'actionner les boutons du module SW de la main gauche, sans cacher les affichages, tout en pilotant de la main droite avec le joystick. L'opération a nécessité de tourner les affichages dans le code source des modules, ce qui se fait très simplement (dans le setup, voir les lignes :
Au passage il a fallu refaire la sérigraphie vinyle du module SW.
2) Ajout d'un bouton poussoir sur le dessus du SW (permute entre vue interne / externe)
3) Ajout d'un potentiomètre sur le module SW -> commande de lacet (gouverne de direction de l'empennage arrière), du coup suppression du pédalier et du second joystick qui le prenait en charge. La raison ? Mon petit lapin Skippy vit en totale liberté dans la maison, et je craignais qu'il aille un jour se faufiler sous les pédales pendant le vol. D'une manière générale il n'y a rien de dangereux pour lui à moins de 80cm du sol. Il a 9 ans et n'a jamais eu de problème, ni causé de dégâts.
4) Ajout d'un second switch (inverseur unipolaire miniature à levier), le premier à droite allume les feux atterrissage, le second au centre commute l'affichage de l'indicateur d'altitude du PFD entre les modes ASL (Above Sea Level) et AAL (Above Aerodrome Level), la référence étant désormais celle du GPS, donc plus de soucis avec les QFE et QNH.
5) Modifications dans le fichier FG_data.h (ajout de l'altitude des pistes).
6) Modifications dans le fichier hardware4.xml.
D'autre part j'ai ajouté les lignes suivantes :
dans le fichier ~/FlightGear/Aircraft/CitationX/citationX-set.xml
ce qui permet d'engager (et stopper) l'autopilot de l'avion (celui de Flightgear) avec la touche 'q' du clavier de l'ordi, sachant qu'il est nécessaire d'engager cet autopilot pour pouvoir piloter l'avion depuis notre panel, avec les encodeurs rotatifs HDG et ALTI et aussi avec notre fonction d'atterrissage automatique guidée pas l'ILS de l'aérodrome (localizer et glide) par appui sur le bouton poussoir "ILS" de notre module SD lorsque l'avion se trouve dans le faisceau de l'ILS (à peu près dans l'axe de la piste entre 20 et 10 NM et à 3000ft de hauteur).
31 Ecrans de la version 17.3
32 Version 18.0
33 Schéma de la version 18.0 du module ND
34 Version 19.0
15 décembre 2021 :
Dans cette nouvelle version le positionnement du petit avion sur la carte du ND ne se fait plus en fonction du radial et de la distance des balises de l'ILS, elle est maintenant directement reçue (en USB) depuis FlightGear, par l'intermédiaire du module PFD (en WiFi). L'avantage c'est que cela fonctionne même en l'absence d'équipement ILS de l'aéroport (comme c'est par exemple le cas, jusqu'à plus ample information, pour San SEBASTIAN).
Mais cela m'a obligé :
de faire sortir les données de Longitude et de Latitude sur la liaison USB par FlightGear, (par lecture dans l'arbre des propriétés internes), donc -> modif du fichier 'hardware4.xml'
De recevoir ces données par le PFD et de les exposer sur le serveur WiFi
De consulter ensuite ces données sur le module ND
puis de convertir cette position Log/Lat (WGS84) en coordonnées géographiques planes (par projection Lambert II étendu) utilisables sur la carte . Cette projection n'est toutefois exploitable que pour la couverture de la France métropolitaine... Il restera à trouver une solution pour l'ensemble de la planète.
35 Version 21.0
12 janvier 2022 :
36 version 24.0
24 avril 2022 :
37 Version 25.0 - Plan des installations
x0=250.0
38 version 28.0
06 juin 2022 :
39 Un nouveau module ! le MCDU
Multipurpose Control and Display Unit
Ce MCDU comprend un afficheur et cinq boutons poussoirs.
Il permet en quelques clics :
de décoller automatiquement gère les gaz, la consigne d'altitude, les flaps, le tangage, puis engage l'autopilot de FG
gestion de la route (goto vers une piste ou un point d'approche) puis engage l'autoland
approche (gère altitude, vitesse, pente et taux de descente, cap, trajectoire, )
pose l'avion sur la piste sélectionnée sur le ND (gère les AF et l'arrondi)
freine
Ah oui.. et nous on fait quoi ? Ben on boit un café !
40 Détail du MCDU
Dans la partie gauche : le listing des action effectuées
Au centre : des étiquettes qui s'allument en fonction de l'état du vol et des options choisies.
Sur la droite l'afficheur 'allume' des 'leds' lors d'appui sur le bouton correspondant. Les traits inclinés indiquent la fonction de chaque bouton.
Concernant la route :
RWY (runway) permet de naviguer vers l'aérodrome choisi (le centre de la piste)
les points ptAA et ptBB sont des balises(virtuelles) d'approche et de passage en finale, situées à 10NM de la piste, de part et d'autre. Un vignette rouge indique un sens d'approche interdit (à cause du relief ou de la proximité d'une ville ou zone interdite de survol).
La fonction roulage permet de déplacer l'avion au sol sur les taxiway (et sur la piste) à une vitesse automatique = 10 kts
41 Code source du MCDU
CODE SOURCE en C++
//
// ==================================
String version= "36.4" ;
// ==================================
#include <stdint.h>
#include <TFT_eSPI.h> // Hardware-specific library
#include "Free_Fonts.h"
#include "SPI.h"
#include "MCDU.h"
#include "FG_data.h"
#include "Fonctions1.h"
#include <WiFi.h>
#include <HTTPClient.h> // Remarque: les fonctions WiFi consomment 50% de la mémoire flash (de programme)
const char * ssid = "PFD_srv" ; // nous nous connectons en tant que client au même serveur (le PFD) que le ND.
const char * password = "72r4TsJ28" ; // doit être identique à celui du serveur du PFD
const char * srvName_flags = "http://192.168.4.1/flags" ;
const char * srvName_num_bali = "http://192.168.4.1/num_bali" ;
//const char* srvName_msg = "http://192.168.4.1/msg";
String recp_flags; // qui sont émis par le serveur (PFD) en réponse à la requette
String recp_msg;
String memo_msg;
String recp_num_bali;
String memo_num_bali;
Etiquette Etiq_1;
Etiquette Etiq_2;
Etiquette Etiq_3;
Etiquette Etiq_4;
Etiquette Etiq_5;
Etiquette Etiq_6;
Etiquette Etiq_7;
Etiquette Etiq_7b;
Etiquette Etiq_8;
Etiquette Etiq_9;
Etiquette Etiq_10;
Etiquette Etiq_10b;
Etiquette Etiq_10c;
Etiquette Etiq_11;
Etiquette Etiq_12;
Etiquette Etiq_13;
Etiquette Etiq_14;
Etiquette Etiq_15;
Etiquette Etiq_16;
Led Led1;
Led Led2;
Led Led3;
Led Led4;
Led Led5;
//-------------------------------------------------------------------------------------------
// pour la 'carte universelle'
// voir schéma de la platine ESP32
// numérotation dans l'ordre de la disposition des pins du connecteur des boutons, en partant de GND
uint16_t bouton1= 1 ; // (2^0) -> positionnera 1 bit dans le mot
const int GPIO_bouton1 = 33 ;
bool bouton1_etat;
bool memo_bouton1_etat;
uint16_t bouton2= 2 ; // (2^1)
const int GPIO_bouton2 = 32 ;
bool bouton2_etat;
bool memo_bouton2_etat;
uint16_t bouton3= 4 ; // (2^2)
const int GPIO_bouton3 = 34 ;
bool bouton3_etat;
bool memo_bouton3_etat;
uint16_t bouton4= 8 ; // (2^3)
const int GPIO_bouton4 = 36 ;
bool bouton4_etat;
bool memo_bouton4_etat;
uint16_t bouton5= 16 ; // 16 (2^4)
const int GPIO_bouton5 = 39 ;
bool bouton5_etat;
bool memo_bouton5_etat;
uint16_t bouton6= 32 ; // 32 (2^5)
const int GPIO_bouton6 = 35 ;
bool bouton6_etat;
bool memo_bouton6_etat;
//-------------------------------------------------------------------------------------------
uint16_t boutons = 0 ; // mot dont chaque bit correspond à un bouton connecté à ce module MCDU
uint8_t SDcardOk= 0 ;
int16_t num_bali= 0 ;
uint16_t flags_i;
uint16_t memo_flags_i;
uint32_t memo_micros= 0 ;
uint32_t temps_ecoule;
uint8_t num_ligne_msg= 0 ;
uint16_t couleur_ligne;
uint32_t bmp_offset= 0 ;
uint16_t data_rect1[ 300 * 50 ] ; // pixels d'un rectangle
void init_afficheur( )
{
TFT480.init ( ) ;
TFT480.setRotation ( 1 ) ; // 0..3 à voir, suivant disposition de l'afficheur
TFT480.fillScreen ( NOIR) ;
TFT480.setTextColor ( NOIR, BLANC) ;
}
void init_WiFi( )
{
WiFi.persistent ( false ) ;
WiFi.begin ( ssid, password) ;
delay( 2000 ) ;
}
void httpGetParams( ) // paramètres divers depuis le PFD & envoi état des états des boutons en argument de la requette
{
String s1;
String s2;
HTTPClient http;
s1= "?btMCDU=" ; // sw1 (nom arbitraire..) pour désigner l'argument n°1 envoyé dans l'URL de la requête
s2= String( boutons) ;
s1+= s2;
http.begin ( srvName_flags+ s1) ;
int httpResponseCode = http.GET ( ) ;
if ( httpResponseCode> 0 ) { recp_flags = http.getString ( ) ; }
http.end ( ) ;
}
/*
void httpGet_msg()
{
// envoie requete au serveur
HTTPClient http;
http.begin(srvName_msg);
int httpResponseCode = http.GET();
if (httpResponseCode>0) { recp_msg = http.getString();}
http.end();
}
*/
void httpGet_num_bali( )
{
// envoie requete au serveur
HTTPClient http;
http.begin ( srvName_num_bali) ;
int httpResponseCode = http.GET ( ) ;
if ( httpResponseCode> 0 ) { recp_num_bali = http.getString ( ) ; }
http.end ( ) ;
}
void interroge_WiFi( )
{
// voir les "server.on()" dans la fonction "setup()" du code du PFD pour la source des données
if ( WiFi.status ( ) == WL_CONNECTED )
{
httpGetParams( ) ;
flags_i = recp_flags.toInt ( ) ;
}
}
/*
void requete_WiFi_2()
{
// voir les "server.on()" dans la fonction "setup()" du code du PFD pour la source des données
// plus précisément la ligne -> server.on("/msg", ....
recp_msg = "";
if(WiFi.status()== WL_CONNECTED )
{
httpGet_msg(); // envoie requete au serveur, avec position des switch en argument.
}
}
*/
void requete_WiFi_3( )
{
// voir les "server.on()" dans la fonction "setup()" du code du PFD pour la source des données
recp_num_bali= "" ;
if ( WiFi.status ( ) == WL_CONNECTED )
{
httpGet_num_bali( ) ; // envoie requete au serveur, avec position des switch en argument.
}
}
void affi_flags( ) // nombre jaune en haut à droite
{
TFT480.setTextFont ( 1 ) ;
TFT480.setTextColor ( JAUNE) ;
affi_int_en_binaire( flags_i, 400 , 2 ) ;
}
void affi_etat_boutons( ) // nombre vert en haut à gauche
{
uint16_t x0= 10 ;
uint16_t y0= 23 ;
interroge_WiFi( ) ; // et envoie les arguments le cas échéant
TFT480.fillRect ( x0, y0, 30 , 12 , GRIS_TRES_FONCE) ; // efface le nombre précédemment affiché
//TFT480.setTextFont(1);
TFT480.setFreeFont ( FF1) ;
TFT480.setTextColor ( VERT) ;
String s1 = String( boutons) ;
TFT480.drawString ( s1, x0, y0) ;
}
void init_etiquettes( ) // pour l'affichage des données, voir la fonction "affi_data_piste()"
{
uint16_t x0 = 120 ;
uint16_t y0 = 5 ;
uint16_t xi;
uint16_t yi;
xi= x0;
yi= y0;
TFT480.drawRoundRect ( xi- 10 , yi+ 10 , 300 , 65 , 3 , GRIS) ; // panel décollage
TFT480.setFreeFont ( FF5) ;
Etiq_1.init ( xi,yi,110 ,24 ) ;
Etiq_1.st = "DECOLLAGE" ;
Etiq_1.set_couleurs ( GRIS, GRIS_TRES_FONCE) ;
yi+= 30 ;
TFT480.setFreeFont ( FF1) ;
TFT480.setTextColor ( BLANC, NOIR) ;
TFT480.drawString ( "Rudder:" , xi+ 5 , yi+ 5 ) ;
TFT480.setFreeFont ( FF5) ;
Etiq_2.init ( xi+ 100 ,yi,80 ,24 ) ;
Etiq_2.st = "Manuel" ;
Etiq_2.set_couleurs ( GRIS, GRIS_TRES_FONCE) ;
Etiq_3.init ( xi+ 200 ,yi,80 ,24 ) ;
Etiq_3.st = "Auto" ;
Etiq_3.set_couleurs ( GRIS, GRIS_TRES_FONCE) ;
yi+= 50 ;
////Etiq_4.init(xi,yi,180,24);
////Etiq_4.st="EN VOL";
////Etiq_4.set_couleurs(GRIS, GRIS_TRES_FONCE);
//yi+=30;
Etiq_4.init ( xi+ 110 ,yi,180 ,24 ) ;
Etiq_4.st = "AutoPilot de FG" ;
Etiq_4.set_couleurs ( GRIS_CLAIR, GRIS_TRES_FONCE) ;
yi+= 40 ;
TFT480.setFreeFont ( FF1) ;
TFT480.setTextColor ( BLANC, NOIR) ;
TFT480.drawString ( "AutoPilot ESP:" , xi, yi+ 5 ) ;
TFT480.setFreeFont ( FF5) ;
Etiq_5.init ( xi+ 160 ,yi,55 ,24 ) ;
Etiq_5.st = "Manu" ;
Etiq_5.set_couleurs ( GRIS_CLAIR, GRIS_TRES_FONCE) ;
Etiq_6.init ( xi+ 225 ,yi,65 ,24 ) ;
Etiq_6.st = "Route" ;
Etiq_6.set_couleurs ( GRIS_CLAIR, GRIS_TRES_FONCE) ;
yi+= 30 ;
TFT480.drawRoundRect ( xi- 10 , yi+ 10 , 305 , 55 , 3 , GRIS) ;
Etiq_7.init ( xi,yi,75 ,24 ) ;
Etiq_7.st = "ROUTE" ;
Etiq_7.set_couleurs ( GRIS_CLAIR, GRIS_TRES_FONCE) ;
TFT480.drawRoundRect ( xi- 10 , yi+ 10 , 305 , 55 , 3 , GRIS) ;
TFT480.setFreeFont ( FF1) ;
Etiq_7b.init ( xi+ 90 ,yi,200 ,24 ) ;
Etiq_7b.st = "----" ; // OACI + Nom
Etiq_7b.set_couleurs ( BLEU_CLAIR, NOIR) ;
yi+= 30 ;
TFT480.setFreeFont ( FF1) ;
TFT480.setTextColor ( BLANC, NOIR) ;
TFT480.drawString ( "to" , xi, yi+ 5 ) ;
TFT480.setFreeFont ( FF5) ;
TFT480.setFreeFont ( FF5) ;
Etiq_8.init ( xi+ 28 ,yi,46 ,24 ) ;
Etiq_8.st = "RWY" ;
Etiq_8.set_couleurs ( GRIS_CLAIR, GRIS_TRES_FONCE) ;
Etiq_9.init ( xi+ 81 ,yi,46 ,24 ) ;
Etiq_9.st = "ptA" ;
Etiq_9.set_couleurs ( GRIS_CLAIR, GRIS_TRES_FONCE) ;
Etiq_10.init ( xi+ 133 ,yi,46 ,24 ) ;
Etiq_10.st = "ptB" ;
Etiq_10.set_couleurs ( GRIS_CLAIR, GRIS_TRES_FONCE) ;
Etiq_10b.init ( xi+ 184 ,yi,50 ,24 ) ;
Etiq_10b.st = "crc1" ; // Tours de piste (circling) dans un sens
Etiq_10b.set_couleurs ( GRIS_CLAIR, GRIS_TRES_FONCE) ;
Etiq_10c.init ( xi+ 240 ,yi,50 ,24 ) ;
Etiq_10c.st = "crc2" ; // // Tours de piste dans l'autre sens
Etiq_10c.set_couleurs ( GRIS_CLAIR, GRIS_TRES_FONCE) ;
yi+= 55 ;
//TFT480.drawRoundRect(xi-10, yi+10, 300, 55, 3, GRIS);
Etiq_11.init ( xi,yi,100 ,24 ) ;
Etiq_11.st = " FINALE" ;
Etiq_11.set_couleurs ( GRIS_CLAIR, GRIS_TRES_FONCE) ;
Etiq_12.init ( xi+ 105 ,yi,100 ,24 ) ;
Etiq_12.st = " LANDING" ;
Etiq_12.set_couleurs ( GRIS, GRIS_TRES_FONCE) ;
Etiq_14.init ( xi+ 210 ,yi- 13 ,80 ,24 ) ;
Etiq_14.st = " LONG" ;
Etiq_14.set_couleurs ( GRIS, GRIS_TRES_FONCE) ;
Etiq_15.init ( xi+ 210 ,yi+ 13 ,80 ,24 ) ;
Etiq_15.st = " SHORT" ;
Etiq_15.set_couleurs ( GRIS, GRIS_TRES_FONCE) ;
yi+= 50 ;
Etiq_16.init ( xi+ 60 ,yi,100 ,24 ) ;
Etiq_16.st = " AU SOL" ;
Etiq_16.set_couleurs ( GRIS, GRIS_TRES_FONCE) ;
Etiq_13.init ( xi+ 190 ,yi,100 ,24 ) ;
Etiq_13.st = " ROULAGE" ;
Etiq_13.set_couleurs ( GRIS, GRIS_TRES_FONCE) ;
}
void init_SDcard( )
{
String s1;
uint16_t y= 0 ;
TFT480.setTextColor ( VERT, NOIR) ;
TFT480.drawString ( "Init SDcard" , 0 , y) ;
y+= 20 ;
if ( ! SD.begin ( ) )
{
TFT480.drawString ( "Card Mount Failed" , 0 , y) ;
delay ( 2000 ) ;
TFT480.fillRect ( 0 , 0 , 480 , 320 , NOIR) ; // efface
return ;
}
uint8_t cardType = SD.cardType ( ) ;
if ( cardType == CARD_NONE)
{
TFT480.drawString ( "No SDcard" , 0 , y) ;
delay ( 2000 ) ;
TFT480.fillRect ( 0 , 0 , 480 , 320 , NOIR) ; // efface
return ;
}
SDcardOk= 1 ;
TFT480.drawString ( "SDcard Type: " , 0 , y) ;
if ( cardType == CARD_SD) { TFT480.drawString ( "SDSC" , 150 , y) ; }
else if ( cardType == CARD_SDHC) { TFT480.drawString ( "SDHC" , 150 , y) ; }
y+= 20 ;
uint32_t cardSize = SD.cardSize ( ) / ( 1024 * 1024 ) ;
s1= ( String) cardSize + " GB" ;
TFT480.drawString ( "SDcard size: " , 0 , y) ;
TFT480.drawString ( s1, 150 , y) ;
//Serial.printf("Total space: %lluMB\n", SD.totalBytes() / (1024 * 1024));
//Serial.printf("Used space: %lluMB\n", SD.usedBytes() / (1024 * 1024));
}
/** ***********************************************************************************
IMAGE.bmp
***************************************************************************************/
/**
Rappel et décryptage de la fonction Color_To_565 : (elle se trouve dans le fichier LCDWIKI_KBV.cpp)
//Pass 8-bit (each) R,G,B, get back 16-bit packed color
uint16_t Color_To_565(uint8_t r, uint8_t g, uint8_t b)
{
return ((r & 0xF8) << 8) | ((g & 0xFC) << 3) | ((b & 0xF8) >> 3);
}
0xF8 = 11111000
0xFC = 11111100
(r & 0xF8) -> 5 bit de gauche de r (on ignore donc les 3 bits de poids faible)
(g & 0xFC) -> 6 bit de gauche de g (on ignore donc les 2 bits de poids faible)
(b & 0xF8) -> 5 bit de gauche de b (on ignore donc les 3 bits de poids faible)
rrrrr---
gggggg--
bbbbb---
après les décalages on obtient les 16 bits suivants:
rrrrr---========
gggggg--===
===bbbbb
soit après le ou :
rrrrrggggggbbbbb
calcul de la Fonction inverse :
RGB565_to_888
**/
uint16_t Color_To_565( uint8_t r, uint8_t g, uint8_t b)
{
return ( ( r & 0xF8 ) << 8 ) | ( ( g & 0xFC ) << 3 ) | ( ( b & 0xF8 ) >> 3 ) ;
}
void RGB565_to_888( uint16_t color565, uint8_t * R, uint8_t * G, uint8_t * B)
{
* R= ( color565 & 0xFFFFF800 ) >> 8 ;
* G= ( color565 & 0x7E0 ) >> 3 ;
* B= ( color565 & 0x1F ) << 3 ;
}
uint16_t bmp_width;
uint16_t bmp_heigh;
uint16_t read_16( File fp)
{
uint8_t low;
uint16_t high;
low = fp.read ( ) ;
high = fp.read ( ) ;
return ( high<< 8 ) | low;
}
uint32_t read_32( File fp)
{
uint16_t low;
uint32_t high;
low = read_16( fp) ;
high = read_16( fp) ;
return ( high<< 8 ) | low;
}
void write_16( uint16_t v16, File fp)
{
uint8_t low, high;
low = v16 & 0xFF ;
high= v16 >> 8 ;
fp.write ( low) ;
fp.write ( high) ;
}
void write_32( uint32_t v32, File fp)
{
uint16_t low, high;
low = v32 & 0xFFFF ;
high= v32 >> 16 ;
write_16( low, fp) ;
write_16( high, fp) ;
}
bool teste_bmp_header( File fp)
{
if ( read_16( fp) ! = 0x4D42 ) { return false ; } // (2 bytes) The header field used to identify the BMP
read_32( fp) ; // (4 bytes) get bmp size (nombre total d'octets)
read_32( fp) ; // (4 bytes) get creator information
bmp_offset = read_32( fp) ; // (4 bytes) get offset information
read_32( fp) ; //get DIB information
// ici on a lu 16 octets
bmp_width = read_32( fp) ; //(4 bytes) get width and heigh information
bmp_heigh = read_32( fp) ; //(4 bytes)
// ici on a lu 24 octets
//if(read_16(fp)!= 1) {return false;}
read_16( fp) ;
//if(read_32(fp)!= 0) {return false;}
return true ;
}
uint8_t LumCtr( uint8_t vi, float lum, float ctr)
{
float v2;
uint8_t result;
v2 = ( ( float ) vi - lum) * ctr;
if ( v2< 0 ) { v2= 0 ; }
if ( v2> 255 ) { v2= 255 ; }
result = ( uint8_t ) v2;
return result;
}
void draw_bmp( uint16_t x0, uint16_t y0, uint8_t rot, float lum, float contraste, File* fp)
{
//sram = freeRam(); Serial.print("03-freeRam="); Serial.println(sram);
uint16_t i,j,k,p,m= 0 ;
uint16_t y1;
uint8_t bmp_data[ 2 * 3 ] = { 0 } ;
uint16_t bmp_color[ 2 ] ;
fp- > seek( bmp_offset) ;
for ( i= 0 ; i< bmp_heigh; i++ )
{
for ( j= 0 ; j< ( bmp_width/ 2 ) ; j++ )
{
m= 0 ;
fp- > read( bmp_data,2 * 3 ) ;
for ( k= 0 ; k< 2 ; k++ )
{
bmp_color[ k] = Color_To_565( LumCtr( bmp_data[ m+ 2 ] ,lum, contraste) , LumCtr( bmp_data[ m+ 1 ] ,lum, contraste) , LumCtr( bmp_data[ m+ 0 ] ,lum, contraste) ) ;
m+= 3 ;
}
for ( p= 0 ; p< 2 ; p++ )
{
if ( rot== 0 )
{
y1= y0;
TFT480.drawPixel ( x0+ i, y0+ j* 2 + p, bmp_color[ p] ) ;
}
if ( rot== 1 )
{
y1= 160 - y0;
TFT480.drawPixel ( x0+ j* 2 + p,320 - ( y1+ i) , bmp_color[ p] ) ;
}
}
}
}
}
void affi_img( uint16_t x0, uint16_t y0, float lum, float contraste, const char * filename1)
{
File bmp_file;
TFT480.setFreeFont ( FF1) ;
TFT480.setTextColor ( ORANGE, NOIR) ;
bmp_file = SD.open ( filename1) ;
if ( ! bmp_file)
{
bmp_file.close ( ) ;
return ;
}
if ( ! teste_bmp_header( bmp_file) )
{
bmp_file.close ( ) ;
return ;
}
draw_bmp( x0, y0, 1 , lum, contraste, & bmp_file) ;
bmp_file.close ( ) ;
// delay(1000);
}
/** -----------------------------------------------------------------------------------
CAPTURE D'ECRAN vers SDcard
/** ----------------------------------------------------------------------------------- */
void write_TFT480_on_SDcard( ) // enregistre le fichier .bmp
{
if ( SDcardOk== 1 )
{
////TFT480.drawString("capture bmp !", 100, 100);
////delay(1000);
String s1;
uint16_t ys= 200 ;
TFT480.setFreeFont ( FF1) ;
TFT480.setTextColor ( JAUNE, NOIR) ;
uint16_t x, y;
uint16_t color565;
uint16_t bmp_color;
uint8_t R, G, B;
if ( ! SD.exists ( "/bmp/capture2.bmp" ) )
{
TFT480.fillRect ( 0 , 0 , 480 , 320 , NOIR) ; // efface
TFT480.setTextColor ( ROUGE, NOIR) ;
TFT480.drawString ( "NO /bmp/capture2.bmp !" , 100 , ys) ;
delay( 300 ) ;
TFT480.fillRect ( 100 , ys, 220 , 20 , NOIR) ; // efface
return ;
}
File File1 = SD.open ( "/bmp/capture2.bmp" , FILE_WRITE) ; // ouverture du fichier binaire (vierge) en écriture
if ( File1)
{
/*
Les images en couleurs réelles BMP888 utilisent 24 bits par pixel:
Il faut 3 octets pour coder chaque pixel, en respectant l'ordre de l'alternance bleu, vert et rouge.
*/
uint16_t bmp_offset = 138 ;
File1.seek ( bmp_offset) ;
TFT480.setTextColor ( VERT, NOIR) ;
for ( y= 320 ; y> 0 ; y-- )
{
for ( x= 0 ; x< 480 ; x++ )
{
color565= TFT480.readPixel ( x, y) ;
RGB565_to_888( color565, & R, & G, & B) ;
File1.write ( B) ; //G
File1.write ( G) ; //R
File1.write ( R) ; //B
}
s1= ( String) ( y/ 10 ) ;
TFT480.fillRect ( 2 , 300 , 20 , 20 , NOIR) ;
TFT480.drawString ( s1, 2 , 300 ) ; // affi compte à rebour
}
File1.close ( ) ; // referme le fichier
TFT480.fillRect ( 2 , 300 , 20 , 20 , NOIR) ; // efface le compte à rebour
}
}
}
/** ----------------------------------------------------------------------------------- */
void affiche_traits_violets( uint16_t x0, uint16_t yi)
{
TFT480.fillRect ( 410 , 230 , 40 , 80 , GRIS_TRES_FONCE) ; // efface
if ( read_bit( flags_i, bit_au_sol) == 0 )
{
// pour la partie haute
TFT480.drawLine ( x0- 50 , yi- 25 , x0- 20 , yi- 25 , VIOLET1) ; affi_indexH( x0- 45 , yi- 25 , - 1 , VIOLET1) ;
TFT480.drawLine ( x0- 20 , yi- 25 , x0- 20 , yi+ 10 , VIOLET1) ;
TFT480.drawLine ( x0- 20 , yi+ 10 , x0+ 10 , yi+ 10 , VIOLET1) ;
}
else
{
// pour la partie basse (vers étiquette [ROULAGE])
TFT480.drawLine ( x0- 50 , yi+ 25 , x0- 20 , yi+ 25 , VIOLET1) ; affi_indexH( x0- 45 , yi+ 25 , - 1 , VIOLET1) ;
TFT480.drawLine ( x0- 20 , yi+ 10 , x0- 20 , yi+ 25 , VIOLET1) ;
TFT480.drawLine ( x0- 20 , yi+ 10 , x0+ 10 , yi+ 10 , VIOLET1) ;
}
}
void init_Leds( ) // pour l'affichage des données, voir la fonction "affi_data_piste()"
{
uint16_t x0 = 460 ;
uint16_t y0 = 5 ;
uint16_t xi;
uint16_t yi;
TFT480.setFreeFont ( FF1) ;
TFT480.setTextColor ( BLANC, NOIR) ;
TFT480.drawRoundRect ( x0, y0, 160 , 305 , 3 , GRIS) ;
xi= x0+ 10 ;
yi= y0+ 16 ;
TFT480.drawLine ( x0- 50 , yi+ 25 , x0- 20 , yi+ 25 , ROUGE) ; affi_indexH( x0- 45 , yi+ 25 , - 1 , ROUGE) ;
TFT480.drawLine ( x0- 20 , yi+ 25 , x0- 20 , yi+ 10 , ROUGE) ;
TFT480.drawLine ( x0- 20 , yi+ 10 , x0+ 10 , yi+ 10 , ROUGE) ;
Led1.init ( xi,yi, 20 , 20 ) ;
Led1.set_couleur ( ROUGE) ;
Led1.eteint ( ) ;
yi+= 64 ;
TFT480.drawLine ( x0- 50 , yi+ 10 , x0+ 10 , yi+ 10 , JAUNE) ; affi_indexH( x0- 45 , yi+ 10 , - 1 , JAUNE) ;
TFT480.setFreeFont ( FF1) ;
Led2.init ( xi,yi, 20 , 20 ) ;
Led2.set_couleur ( JAUNE) ;
Led2.eteint ( ) ;
yi+= 64 ;
TFT480.drawLine ( x0- 50 , yi- 10 , x0- 20 , yi- 10 , VERT) ; affi_indexH( x0- 45 , yi- 10 , - 1 , VERT) ;
TFT480.drawLine ( x0- 20 , yi- 10 , x0- 20 , yi+ 10 , VERT) ;
TFT480.drawLine ( x0- 20 , yi+ 10 , x0+ 10 , yi+ 10 , VERT) ;
Led3.init ( xi,yi, 20 , 20 ) ;
Led3.set_couleur ( VERT) ;
Led3.eteint ( ) ;
yi+= 64 ;
TFT480.drawLine ( x0- 50 , yi- 20 , x0- 20 , yi- 20 , BLEU) ; affi_indexH( x0- 45 , yi- 20 , - 1 , BLEU) ;
TFT480.drawLine ( x0- 20 , yi- 20 , x0- 20 , yi+ 10 , BLEU) ;
TFT480.drawLine ( x0- 20 , yi+ 10 , x0+ 10 , yi+ 10 , BLEU) ;
Led4.init ( xi,yi, 20 , 20 ) ;
Led4.set_couleur ( BLEU) ;
Led4.eteint ( ) ;
yi+= 64 ;
affiche_traits_violets( x0, yi) ;
Led5.init ( xi,yi, 20 , 20 ) ;
Led5.set_couleur ( VIOLET1) ;
Led5.eteint ( ) ;
}
void setup( )
{
Serial.begin ( 19200 ) ;
pinMode( GPIO_bouton1, INPUT_PULLUP) ;
pinMode( GPIO_bouton1, INPUT_PULLUP) ;
pinMode( GPIO_bouton2, INPUT_PULLUP) ;
pinMode( GPIO_bouton3, INPUT_PULLUP) ;
pinMode( GPIO_bouton4, INPUT_PULLUP) ;
pinMode( GPIO_bouton5, INPUT_PULLUP) ;
init_afficheur( ) ;
init_WiFi( ) ;
TFT480.fillRect ( 0 , 0 , 480 , 320 , NOIR) ; // efface
TFT480.setTextColor ( BLANC, NOIR) ;
TFT480.setFreeFont ( FF1) ;
uint16_t y= 0 ;
TFT480.drawString ( "MCDU" , 0 , y) ;
y+= 20 ;
String s1= "version " + version;
TFT480.drawString ( s1, 0 , y) ;
init_SDcard( ) ;
delay ( 2000 ) ;
TFT480.fillRect ( 0 , 0 , 480 , 320 , GRIS_TRES_FONCE) ; // efface
TFT480.fillRect ( 5 , 2 , 100 , 310 , NOIR) ;
TFT480.drawRoundRect ( 5 , 2 , 100 , 310 , 3 , BLANC) ;
init_FG_bali( ) ;
init_etiquettes( ) ;
init_Leds( ) ;
}
void eteint_toutes_etiquettes( )
{
Etiq_1.set_couleurs ( GRIS, GRIS_TRES_FONCE) ; // DECOLLAGE
Etiq_2.set_couleurs ( GRIS, GRIS_TRES_FONCE) ;
Etiq_3.set_couleurs ( GRIS, GRIS_TRES_FONCE) ; // [Auto]
Etiq_4.set_couleurs ( GRIS, GRIS_TRES_FONCE) ; // [Autopilot de FG]
Etiq_5.set_couleurs ( GRIS, GRIS_TRES_FONCE) ; // [Manu]
Etiq_6.set_couleurs ( GRIS, GRIS_TRES_FONCE) ; // [Route]
Etiq_7.set_couleurs ( GRIS, GRIS_TRES_FONCE) ; // [ROUTE]
Etiq_7b.set_couleurs ( BLEU_CLAIR, NOIR) ;
Etiq_8.set_couleurs ( GRIS, GRIS_TRES_FONCE) ; // [RWY]
Etiq_9.set_couleurs ( GRIS, GRIS_TRES_FONCE) ; // [ptA]
Etiq_10.set_couleurs ( GRIS, GRIS_TRES_FONCE) ; // [ptB]
Etiq_10b.set_couleurs ( GRIS, GRIS_TRES_FONCE) ; // [crc1]
Etiq_10c.set_couleurs ( GRIS, GRIS_TRES_FONCE) ; // [crc2]
Etiq_11.set_couleurs ( GRIS, GRIS_TRES_FONCE) ; // [FINALE]
Etiq_12.set_couleurs ( GRIS, GRIS_TRES_FONCE) ; // [LANDING]
Etiq_13.set_couleurs ( GRIS, GRIS_TRES_FONCE) ; // [ROULAGE]
Etiq_14.set_couleurs ( GRIS, GRIS_TRES_FONCE) ; // [LANDING LONG]
Etiq_15.set_couleurs ( GRIS, GRIS_TRES_FONCE) ; // [LANDING SHORT]
Etiq_16.set_couleurs ( GRIS, GRIS_TRES_FONCE) ; // AU SOL
}
void teste_flags_i( ) // reçus du PFD ; -> éteint & allume les étiquettes; fonction appelée uniquement si un flag a changé
{
TFT480.setFreeFont ( FF5) ;
eteint_toutes_etiquettes( ) ;
TFT480.setFreeFont ( FF5) ;
if ( read_bit( flags_i, bit_decollage) == 1 ) { Etiq_1.set_couleurs ( VERT, GRIS_TRES_FONCE) ; } // [DECOLLAGE]
if ( read_bit( flags_i, bit_rudder_decol) == 1 ) { Etiq_3.set_couleurs ( NOIR, VERT) ; } // [Auto]
if ( read_bit( flags_i, bit_FG_AP) == 1 ) { Etiq_4.set_couleurs ( VERT, GRIS_TRES_FONCE) ; } // [Autopilot de FG]
else { Etiq_4.set_couleurs ( GRIS, GRIS_TRES_FONCE) ; }
if ( read_bit( flags_i, bit_route) == 1 )
{
Etiq_6.set_couleurs ( NOIR, VERT) ; // [Route]
Etiq_7.set_couleurs ( VERT, GRIS_TRES_FONCE) ; // [ROUTE]
}
else { Etiq_5.set_couleurs ( NOIR, VERT) ; } // [Manu]
if ( read_bit( flags_i, bit_nav_to_piste) == 1 ) { Etiq_8.set_couleurs ( NOIR, VERT) ; } // [RWY]
if ( read_bit( flags_i, bit_nav_to_ptAA) == 1 ) { Etiq_9.set_couleurs ( NOIR, VERT) ; } // [ptA]
if ( read_bit( flags_i, bit_nav_to_ptBB) == 1 ) { Etiq_10.set_couleurs ( NOIR, VERT) ; } // [ptB]
if ( read_bit( flags_i, bit_nav_to_pti) == 1 )
{
if ( read_bit( flags_i, bit_circling) == 1 )
{
if ( read_bit( flags_i, bit_sens_circling) == 0 ) { Etiq_10b.set_couleurs ( NOIR, VERT) ; } // [crc1] tour de piste sens 0
else { Etiq_10c.set_couleurs ( NOIR, VERT) ; } // [crc2] tour de piste sens 1
}
}
if ( read_bit( flags_i, bit_autoland) == 1 ) { Etiq_11.set_couleurs ( NOIR, VERT) ; } // allume [FINALE]
if ( read_bit( flags_i, bit_atterrissage) == 1 ) { Etiq_12.set_couleurs ( NOIR, VERT) ; } // [LANDING]
if ( read_bit( flags_i, bit_roulage) == 1 ) { Etiq_13.set_couleurs ( NOIR, VERT) ; } // [ROULAGE]
if ( read_bit( flags_i, bit_au_sol) == 0 )
{
if ( read_bit( flags_i, bit_att_short) == 1 ) { Etiq_15.set_couleurs ( NOIR, VERT) ; } // [LANDING SHORT]
if ( read_bit( flags_i, bit_att_short) == 0 ) { Etiq_14.set_couleurs ( NOIR, VERT) ; } // [LANDING LONG]
}
if ( read_bit( flags_i, bit_au_sol) == 1 ) { Etiq_16.set_couleurs ( NOIR, VERT) ; } // [AU SOL]
}
/*
void efface_listing()
{
TFT480.fillRect(8, 40, 95, 265, NOIR);// efface la liste
num_ligne_msg=0;
TFT480.setFreeFont(FM12);
TFT480.setTextColor(ROUGE);
TFT480.drawString("RAZ", 30, 10);
delay(1000);
TFT480.fillRect(8, 5, 95, 265, NOIR);// efface
}
*/
void affi_alerte2( String str1)
{
uint16_t x0= 90 ;
uint16_t y0= 100 ;
for ( uint8_t n= 0 ; n< 5 ; n++ )
{
TFT480.readRect ( x0, y0, 300 , 50 , data_rect1) ; // memorisation
TFT480.fillRect ( x0, y0, 300 , 50 , BLANC) ; // efface
TFT480.drawRoundRect ( x0, y0, 300 , 50 , 3 , VERT) ;
TFT480.setFreeFont ( FMB12) ;
TFT480.setTextColor ( ROUGE) ;
TFT480.drawString ( str1, x0+ 20 , y0+ 10 ) ;
delay( 500 ) ;
TFT480.fillRect ( x0, y0, 300 , 50 , GRIS_TRES_FONCE) ; // efface
TFT480.pushRect ( x0, y0, 300 , 50 , data_rect1) ;
delay( 1000 ) ;
}
TFT480.setFreeFont ( FF5) ;
}
void teste_boutons( ) // boutons locaux
{
// l'int16_t "boutons" sera envoyé au PFD en argument de la requette "httpGetParams()"
// son traitement sera fait par le module PFD, pas ici.
// voir la partie "BOUTONS du module MCDU" dans la fonction "void traitement_boutons()" dans le code du PFD
bouton1_etat = digitalRead( GPIO_bouton1) ; // ROUGE
if ( bouton1_etat ! = memo_bouton1_etat)
{
//efface_listing();
memo_bouton1_etat = bouton1_etat;
if ( bouton1_etat== 1 )
{
Led1.eteint ( ) ;
raz_bit( & boutons, bit_bt1) ;
}
else
{
Led1.allume ( ) ;
TFT480.setFreeFont ( FF1) ;
TFT480.setTextColor ( JAUNE) ;
TFT480.drawString ( "Desserez frein de park (maj+B)" , 120 , 60 ) ;
delay( 1000 ) ;
TFT480.fillRect ( 120 , 60 , 330 , 16 , GRIS_TRES_FONCE) ; // efface
set_bit( & boutons, bit_bt1) ;
}
affi_etat_boutons( ) ;
}
bouton2_etat = digitalRead( GPIO_bouton2) ; // JAUNE
if ( bouton2_etat ! = memo_bouton2_etat)
{
memo_bouton2_etat = bouton2_etat;
if ( bouton2_etat== 1 ) { Led2.eteint ( ) ; raz_bit( & boutons, bit_bt2) ; }
else { Led2.allume ( ) ; set_bit( & boutons, bit_bt2) ; }
affi_etat_boutons( ) ;
}
bouton3_etat = digitalRead( GPIO_bouton3) ; // VERT
if ( bouton3_etat ! = memo_bouton3_etat)
{
memo_bouton3_etat = bouton3_etat;
if ( bouton3_etat== 1 ) { Led3.eteint ( ) ; raz_bit( & boutons, bit_bt3) ; }
else { Led3.allume ( ) ; set_bit( & boutons, bit_bt3) ; }
affi_etat_boutons( ) ;
}
bouton4_etat = digitalRead( GPIO_bouton4) ; // BLEU
if ( bouton4_etat ! = memo_bouton4_etat)
{
memo_bouton4_etat = bouton4_etat;
if ( bouton4_etat== 1 ) { Led4.eteint ( ) ; raz_bit( & boutons, bit_bt4) ; }
else { Led4.allume ( ) ; set_bit( & boutons, bit_bt4) ; }
affi_etat_boutons( ) ;
}
bouton5_etat = digitalRead( GPIO_bouton5) ; // VIOLET
if ( bouton5_etat ! = memo_bouton5_etat)
{
memo_bouton5_etat = bouton5_etat;
if ( bouton5_etat== 1 )
{
Led5.eteint ( ) ;
raz_bit( & boutons, bit_bt5) ;
}
else
{
Led5.allume ( ) ;
set_bit( & boutons, bit_bt5) ;
//write_TFT480_on_SDcard();
}
affi_etat_boutons( ) ;
}
}
/*
void affi_ligne_listing()
{
if ((recp_msg !="") && (recp_msg !="null") && (recp_msg !="RAZ") )
{
TFT480.setTextFont(1);
if(num_ligne_msg==0)
{
efface_listing();
}
String s1 = String(num_ligne_msg);
affi_message(s1, 10, 40+9*num_ligne_msg, 97, 0, JAUNE, NOIR, 0);
s1= recp_msg;
if ((num_ligne_msg %2) == 0) {couleur_ligne = BLEU_FONCE;} else{couleur_ligne = GRIS_FONCE;}
TFT480.fillRect(25, 40+9*num_ligne_msg, 75, 9, couleur_ligne); // fond de la ligne
TFT480.setTextFont(1);
//affi_message(s1, 25, 40+9*num_ligne_msg, 87, 0, BLANC, couleur_ligne, 0);
num_ligne_msg ++;
if(num_ligne_msg>27){num_ligne_msg=0;}
}
if(recp_msg == "alert1")
{
affi_alerte2("EMERGENCY landing");
}
if(recp_msg == "RAZ")
{
//delay(500);
efface_listing();
}
}
*/
void toutes_les_1s( ) // pour ne pas trop solliciter le serveur
{
interroge_WiFi( ) ; // et envoie les arguments le cas échéant
affi_flags( ) ;
affi_etat_boutons( ) ;
if ( ( liste_bali[ num_bali] .sens_app_interdit ) == 'A' )
{
Etiq_9.set_couleurs ( BLANC, ROUGE) ; // sens interdit
//Etiq_10.set_couleurs(GRIS_CLAIR, GRIS_TRES_FONCE);
}
if ( ( liste_bali[ num_bali] .sens_app_interdit ) == 'B' )
{
Etiq_10.set_couleurs ( BLANC, ROUGE) ; // sens interdit
//Etiq_9.set_couleurs(GRIS_CLAIR, GRIS_TRES_FONCE);
}
/*
requete_WiFi_2();
if(recp_msg != memo_msg)
{
memo_msg = recp_msg;
affi_ligne_listing();
}
*/
String s1;
requete_WiFi_3( ) ;
if ( recp_num_bali ! = memo_num_bali)
{
memo_num_bali = recp_num_bali;
num_bali = recp_num_bali.toInt ( ) ;
s1= ( String) liste_bali[ num_bali] .ID_OACI ;
s1 += " " ;
s1 += ( String) liste_bali[ num_bali] .nom ;
s1 = s1.substring ( 0 ,17 ) ;
TFT480.setTextFont ( 2 ) ;
Etiq_7b.st = s1;
Etiq_7b.set_couleurs ( BLEU_CLAIR, NOIR) ; // et affiche le texte
//Etiq_8.set_couleurs(GRIS, GRIS_TRES_FONCE);
//Etiq_9.set_couleurs(GRIS, GRIS_TRES_FONCE);
//Etiq_10.set_couleurs(GRIS, GRIS_TRES_FONCE);
}
//inv_bit(&flags_i, bit_au_sol);
//init_Leds();
//affiche_traits_violets(460, 276);
}
void loop( )
{
temps_ecoule = micros( ) - memo_micros;
if ( temps_ecoule >= 1E6 ) // (>=) et pas strictement égal (==) parce qu'alors on rate l'instant en question
{
memo_micros = micros( ) ;
toutes_les_1s( ) ;
}
teste_boutons( ) ; // local
if ( flags_i ! = memo_flags_i)
{
memo_flags_i = flags_i;
teste_flags_i( ) ; // reçus du PFD
affiche_traits_violets( 460 , 276 ) ;
}
delay( 30 ) ;
}
/** ***************************************************************************************
CLASS Etiquette // affiche sous forme d'une étiquette colorée
********************************************************************************************/
// Constructeur
Etiquette:: Etiquette ( )
{
}
void Etiquette:: init ( uint16_t xi, uint16_t yi, uint16_t dxi, uint16_t dyi)
{
x0 = xi;
y0 = yi;
dx = dxi;
dy = dyi;
//TFT480.setTextColor(BLANC, NOIR);
couleur_contour = BLANC; // par défaut
}
void Etiquette:: traceContour ( )
{
TFT480.drawRoundRect ( x0, y0, dx, dy, 3 , couleur_contour) ;
}
void Etiquette:: efface ( )
{
TFT480.fillRoundRect ( x0, y0, dx, dy, 3 , couleur_fond) ;
traceContour( ) ;
}
void Etiquette:: set_couleurs ( uint16_t c_txt, uint16_t c_fond) // et affiche le texte
{
couleur_texte = c_txt;
couleur_fond = c_fond;
affi_string( ) ;
}
void Etiquette:: affi_string ( )
{
// Pour cette méthode, la police de caract doit être choisie au préalable, extérieurement
efface( ) ;
// TFT480.setFreeFont(FF5); // à parametrer expérieurement avant l'appel
TFT480.setTextColor ( couleur_texte, couleur_fond) ;
TFT480.drawString ( st, x0+ 5 , y0+ 5 ) ;
}
/** ***************************************************************************************
CLASS Led // affiche un petit rectangle coloré
********************************************************************************************/
// Constructeur
Led:: Led ( )
{
}
void Led:: init ( uint16_t xi, uint16_t yi, uint16_t dxi, uint16_t dyi)
{
x0 = xi;
y0 = yi;
dx = dxi;
dy = dyi;
}
void Led:: allume ( )
{
TFT480.fillRect ( x0, y0, dx, dy, couleur) ;
}
void Led:: eteint ( )
{
TFT480.fillRect ( x0, y0, dx, dy, GRIS_TRES_FONCE) ;
TFT480.drawRect ( x0, y0, dx, dy, couleur) ; // bordure
}
void Led:: set_couleur ( uint16_t coul_i)
{
couleur = coul_i;
}
42 Le fichier d'entête MCDU.h
43 Remplacer OpenStreetMap par OpenTopoMap dans l'interface Phi
J'aime bien voler dans des endroits montagneux, aux alentours d'Annecy, Chambéry, Tarbes, dans l'arrière pays niçois ou en Corse pour la beauté des paysages.
Toutefois les montagnes et les avions ne font pas très bon ménage ! Aussi je me suis dit que les cartes de opentopomap seraient adaptées à la situation.
L'interface Phi permet de visualiser la position de l'avion sur les cartes OpenStreetMap par défaut mais OpenTopoMap n'est pas proposé dans les menu (en tous cas pas dans ma config).
Je savais que le code concernant l'interface phi se trouvait dans le dossier "/usr/share/games/flightgear/Phi/". J'ai donc fait une recherche de fichiers contenant le texte "openstreetmap" dans ce dossier, et j'ai trouvé le fichier "map.js" dans le dossier "/usr/share/games/flightgear/Phi/widgets/". Et je savais que la syntaxe de l'URL d'accès aux cartes est identique pour OpenStreetMas et OpenTopomap... Donc rien de plus simple, logiquement, pour obtenir le résultat recherché.
Voici la marche à suivre :
1- Faire une copie de sécurité du fichier "/usr/share/games/flightgear/Phi/widgets/maps.js".
2- Ouvrir le-dit fichier.
3- Remplacer toutes les (5) occurrences "openstreetmap" par "opentopomap" (en conservant la casse d'origine le cas échéant).
4- Enregistrer le fichier.
Et voilà, ça marche !
Et il est facile de conserver les deux options en modifiant le javascript dans le fichier map.js
Voici le fichier ainsi modifié: (cherchez "baseLayers" dans ce fichier pour voir les détails de la modif)
44 Documents et code source complet :
Code source en C++
9 avril 2025 : J'ai ajouté une version du code source du PFD adaptée à l’éditeur VScode/PlatformIO
L'avantage par rapport à l'EDI Arduino c'est que ça encapsule toutes les dépendances et les bibliothèques nécessaires et dans la bonne version.
45 Utiliser Geany comme éditeur
46 Voici un exemple de l'édition du code source avec Geany
Pour info, j'écris le code avec Geany qui permet :
Coloration syntaxique entièrement personnalisable
liste des fonctions
onglets
outils de recherche d’occurrence
outils de recherche de fonctions
arborescence des fichiers
marques pages
se rendre à un numéro de ligne (par exemple une ligne que le compilateur Arduino ne digère pas...)
et j'en oublie.
et bien sûr en tout-écran sur un moniteur 24", avec un second écran (24" également) à côté pour afficher un terminal série (CuteCom), et l'EdI Arduino pour compiler.
Pour les essais : FlightGear sur l'écran principal et la carte (géographique) dans un navigateur (Firefox) sur l'écran secondaire.
47 Vidéo - Décollage LFMT
48 Le Lac du Salagou